Scanner tridimensionnel
Un scanner tridimensionnel est un appareil de numérisation et d'acquisition 3D.
Un scanner tridimensionnel est un appareil qui analyse les objets ou leur environnement proche pour recueillir des informations précises sur la forme et éventuellement sur l'apparence (couleur, texture…) de ceux-ci. Les données ainsi collectées peuvent alors être utilisées pour construire des images de synthèse en trois dimensions (objets numériques) à des fins diverses. Ces appareils sont beaucoup utilisés par les industries du divertissement pour des films ou des jeux vidéo. Des images numériques en 3D d'objets scannés servent également à la conception industrielle, à la conception d'orthèses et de prothèses, à la rétro-ingénierie, pour le contrôle qualité (référentiel numérique) ou pour la documentation d'objets culturels.
Diverses techniques peuvent être utilisées dans la numérisation d'objet en image 3D ; chacune a ses limites, avantages et coûts. Certains types d'objets restent toutefois encore difficile à numériser : par exemple les appareils utilisant des techniques optiques rencontrent beaucoup de difficultés avec des objets brillants, miroitants ou transparents.
Il existe cependant des méthodes permettant de scanner les objets brillants, par exemple en les recouvrant d'une fine couche de poudre blanche qui permettra à plus de photons de se réfléchir et de parvenir à l'optique du scanner. Les scanners laser peuvent envoyer des trillions de photons vers un objet et en retour recevoir un petit pourcentage de ces photons par les optiques qu'ils utilisent. La réflectivité d'un objet dans le visible est basée sur la couleur de l'objet, c'est l'albédo. Une surface blanche reflètera beaucoup de lumière en retour et une surface noire en réfléchira seulement une petite quantité. Les objets transparents comme le verre vont seulement réfracter de la lumière et donner de fausses informations sur les trois dimensions.
Principe
Un scanner 3D mesure généralement le positionnement d'un échantillonnage de points dans un système de coordonnées - un nuage de points - de la surface d'un sujet pour ensuite en extrapoler la forme à partir de leur répartition : ce procédé est appelé une reconstruction 3D. Si la couleur de chacun des points est analysée, alors celle de la surface peut également être reconstituée.
Des analogies existent entre un appareil photo et un scanner 3D. Les deux ont un champ de vision et ne peuvent voir ce qui est masqué, les deux techniques étant optiques. Si le premier capture les couleurs des surfaces dans son champ l'autre mesure son positionnement relatif par rapport à un échantillon de points des surfaces.
L'image produite est basée sur une série de données composées des coordonnées positionnant chacun des points échantillonnés par rapport au scanner 3D. Si un système de coordonnées sphériques est utilisé et que le scanner en est l'origine, chaque point peut alors être identifié par des coordonnées (r, φ, θ). r représente la distance du scanner au point. φ et θ sont les angles formés entre la ligne allant de l'origine au point analysé à deux plans passant par l'origine, l'un horizontal et l'autre vertical. Ces coordonnées sphériques permettent de situer dans l'espace chacun des points par rapport au scanner, travail préalable et nécessaire à la modélisation numérique de l'image en trois dimensions de l'objet.
Généralement, les données (coordonnées des points) recueillies avec une seule passe ne sont pas suffisantes pour modéliser entièrement un sujet. Le travail doit être effectué de nombreuses fois, voir des centaines de fois, à partir de points de vue différents. Toutes les données recueillies doivent être réinterprétées et situées dans un système de coordonnées unique et regroupées. Le processus, utilisant les différentes mesures avant d'être réinterprétées jusqu'à la modélisation est connu sous le nom de (en) 3D scanning pipeline [1].
Techniques de collecte de données
Les scanners 3D se divisent en deux familles : celles nécessitant un contact avec le sujet et les autres. Les sans-contacts peuvent également être subdivisées en deux principales catégories, les scanners actifs et passifs. Ils se déclinent eux-mêmes en de nombreuses sous-catégories en fonction de leur principe technique.
Scanner avec contact
Les scanners 3D avec contact sondent le sujet grâce à un contact physique et ont une bonne précision. Cependant, leur usage ne peut être généralisé à tous les types de numérisation. En effet, leur principe même, basé sur un contact physique, peut détruire ou altérer des objets fragiles. Ils font courir un risque pour une utilisation sur des objets uniques ou de valeur comme des objets historiques. Un autre inconvénient de cette technique est sa relative lenteur par rapport aux autres méthodes. Le lent déplacement du bras sur lequel le palpeur est monté fait que les mesures sont réalisées à une faible fréquence, à quelque 0,1 kilohertz. Par comparaison, un système utilisant un scanner optique effectue ses mesures entre 10 et 500 kilohertz. Ce type de scanner est utilisé dans l'industrie pour sa précision. Dans l'industrie mécanique, par exemple, les machines à mesurer tridimensionnelles. Un autre exemple, dans l'industrie d'animation cinématographique, des modèles sculptés dans de la terre glaise sont ensuite numérisés en trois dimensions.
Scanner sans contact actif
Les scanners actifs émettent un rayonnement et détectent sa réflexion afin de sonder un objet ou un environnement. Différents types de source de rayonnement sont utilisés : lumière, ultrason ou rayon X.
Scanner par temps de vol

Le scanner 3D Lidar est un appareil actif qui utilise un faisceau laser pour sonder le sujet. Au cœur de ce type de scanner se trouve un télémètre laser permettant de calculer la distance avec la surface de l'objet étudié en comptant le temps nécessaire au trajet aller-retour de l'impulsion du faisceau laser réfléchi. Puisque la vitesse de la lumière est connue, le temps de retour permet de déterminer la distance parcourue par la lumière, qui est deux fois la distance entre le scanner et la surface. Si est le temps de retour, alors la distance est égale à . Évidemment, l'exactitude du scanner par temps de vol dépend de la précision de la mesure du temps de retour , sachant que 3,3 picosecondes est approximativement le temps pris par la lumière pour parcourir un millimètre.



Le télémètre laser détecte seulement un point à la fois dans la direction sur laquelle il est pointé. Pour cela, l'appareil scanne la totalité de son champ de vision point par point et doit changer sa direction de vue à chaque mesure. Elle peut être changée par la rotation de l'appareil lui-même ou par l'utilisation d'un système de miroirs rotatifs. Cette dernière méthode est la plus couramment utilisée parce que les miroirs sont plus légers et peuvent changer de direction plus rapidement avec une plus grande précision. Les scanners 3D par temps de vol peuvent mesurer la distance de 10 000 à 100 000 points par seconde.
Scanner par décalage de phase
Une autre technique utilisée par les scanners laser pour mesurer des distances est la « mesure de décalage de phase ». Le scanner émet un rayon laser qui, au contact de l'objet, est réfléchi vers le scanner laser. La longueur d’onde d'émission du laser varie selon le fournisseur. Le miroir du scanner renvoie le rayon laser à la verticale vers le même objet. L’angle vertical est codé en même temps que la mesure de distance.
Le scanner laser pivote à 360° sur lui-même à l’horizontale. L'angle horizontal est calculé simultanément avec la mesure de la distance. La distance ainsi que l'angle vertical et horizontal donnent une coordonnée polaire (δ, α, β) qui est convertie en coordonnée cartésienne (x, y, z). Certains scanners laser utilisent la technique de mesure du décalage de phase pour mesurer la distance par rapport à une surface. L’appareil projette un rayon laser infrarouge qui revient au scanner par réflexion. Celui-ci calcule la distance au millimètre près en analysant le décalage de phase entre le rayon émis et le rayon reçu. Le rayon laser d’une onde sinusoïdale connue est diffusé par une source laser. Il s’agit de la « lumière émise ». Une partie du rayon laser est réfléchie depuis la cible vers la source. On parle alors de « lumière retour ». La phase de cette « lumière retour » est comparée à celle de la lumière émise connue pour déterminer l’« historique de la lumière émise ». La différence entre les deux pics est appelée « décalage de phase ». Le décalage de phase obtenu correspond à 2π x le temps de vol x la fréquence de modulation. Les scanners à décalage de phase sont généralement plus rapides et plus précis que les scanners laser 3D à temps de vol, mais ils ont une portée plus réduite.
Scanner par triangulation
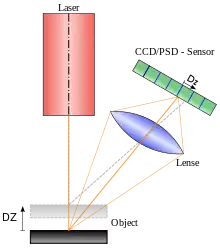
Le scanner laser par triangulation est un scanner actif qui utilise également la lumière laser pour sonder son environnement. Il pointe sur le sujet avec un faisceau comme pour celui par temps de vol et utilise un appareil photo pour situer le point. En fonction de la distance à la surface, le point apparaît à un endroit différent dans le champ de vision de l'appareil. Cette technique est appelée triangulation parce que le point laser, l'appareil photo et l'émetteur laser forment un triangle. La longueur d'un côté du triangle, la distance entre l'appareil photo et l'émetteur laser est connue. L'angle du côté de l'émetteur laser est également connu. L'angle du côté de l'appareil photo peut être déterminé en regardant l'emplacement du point laser dans le champ de vision de l'appareil photo. Ces trois données déterminent la forme et les dimensions du triangle et donnent la position du point laser. Dans la plupart des cas, une bande laser, plutôt qu'un point, balaie l'objet pour accélérer le processus d'acquisition. Le Conseil national de recherches Canada a été parmi les premiers instituts à développer une technique de scanner basée sur la triangulation en 1978[2].
Notes sur les scanners par temps de vol et par triangulation
Les télémètres par triangulation ou par temps de vol ont tous deux des forces et des faiblesses qui les rendent appropriés pour des situations différentes. L'avantage d'un télémètre par temps de vol est sa grande portée lui permettant de travailler sur de longues distances de l'ordre de plusieurs kilomètres. Ces scanners sont alors indiqués pour scanner de grandes structures comme des bâtiments ou des reliefs géographiques. Leur faiblesse est leur imprécision. À cause de la très grande célérité de la lumière, chronométrer l'aller-retour du signal est ardu, et la précision de la mesure est relativement faible, de l'ordre du millimètre. À l'opposé, les scanner par triangulation ont une faible portée, de quelques mètres, mais leur précision est relativement bonne, de l'ordre du dixième de millimètre .
La précision des scanners par temps de vol peut être perdue quand une impulsion frappe le bord d'un objet, l'information renvoyée provient alors de deux endroits différents pour une seule émission. Les coordonnées relatives à la position du scanner d'un point ayant frappé un bord seront calculées d'après une moyenne et sa localisation sera erronée. Lors de l'utilisation d'un scanner à haute résolution sur un objet, la probabilité pour que le faisceau frappe un bord est plus élevée et les données afférentes montreront du bruit juste derrière ces bords. Une plus petite largeur du faisceau du scanner aidera à résoudre ce problème mais sera limitée en termes de portée puisque la largeur augmentera au fur et à mesure de la distance. Les logiciels peuvent également être utiles en déterminant lequel des deux rayons frappe le premier et en éliminant le second.
À une fréquence de 10 000 mesures par seconde, une passe d'un scanner à basse résolution peut prendre moins d'une seconde, mais les scanners à haute résolution demandant des millions d'échantillonnages, peuvent prendre plusieurs minutes dans le cas des scanners par temps de vol. Les conséquences en sont les distorsions liées au mouvement. Puisque chaque point est échantillonné à un moment différent, le moindre mouvement du sujet ou du scanner distordra les données collectées. Habituellement, le sujet et le scanner doivent tous deux être montés sur une platine stable et les vibrations doivent être limitées. Utiliser ces appareils pour scanner des objets en mouvement est malaisé.
Récemment, des travaux de recherche sur la compensation de la distorsion liée à de faibles vibrations ont été effectués[3].
Au cours du scan, dans une position donnée et quelle qu'en soit la durée, un léger mouvement de l'appareil peut être induit par une variation de température. Si un scanner est posé sur un trépied et qu'il y a un fort soleil sur un de ses pieds alors il va se dilater et lentement distordre les données du scan d'un côté par rapport à l'autre. Certains scanners laser ont un compensateur de niveau intégré pour contrer tout mouvement du scanner pendant son fonctionnement.
Holographie conoscopique
Dans un système conoscopique un rayon laser est projeté sur une surface, puis la réflexion au travers du même faisceau passe à travers un cristal biréfringent et est envoyé sur un capteur CDD. La fréquence des motifs de diffraction peut être analysée et permet de déterminer la distance par rapport à cette surface. L'atout principal de l'holographie conoscopique est la colinéarité, c'est-à-dire qu'un unique faisceau (aller-retour) est nécessaire pour effectuer la mesure, permettant de mesurer par exemple la profondeur d'un trou finement percé ce qui est impossible par triangulation.
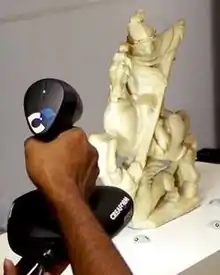
Scanner manuel
Les scanners laser manuels créent des images 3D à partir du principe de triangulation décrit précédemment : un point ou une ligne laser est projeté sur un objet à l'aide d'un appareil manuel et un capteur (typiquement un capteur CDD ou position sensitive device) mesure la distance par rapport à la surface.
Les positions sont enregistrées par rapport à un système de coordonnées interne et le scanner étant lui-même en mouvement sa position doit alors être mesurée. La position peut être déterminée par le scanner en utilisant des points de repères caractéristiques sur la surface en cours de numérisation (typiquement des bandes réfléchissantes adhésives) ou en utilisant une méthode de repérage externe. L'appareil chargé de ce repérage se présente sous la forme d'une Machine à mesurer tridimensionnelle équipée d'une caméra incorporée (pour définir l'orientation du scanner) ou sous celle d'un appareil de photogrammétrie utilisant trois ou plus caméras permettant les six degrés de liberté du scanner. Les deux techniques tendent à utiliser des leds infrarouges incorporées au scanner qui sont perçues par le(s) caméra(s) au travers des filtres permettant de les voir malgré l'éclairage ambiant.
L'information est recueillie par un ordinateur et enregistrée comme les coordonnées de points situés dans un espace tridimensionnel, à l'aide d'un traitement informatique ceux-ci peuvent être convertis par triangulation en un canevas puis en un modèle informatique, le plus souvent sous forme de surfaces NURBS. Les scanners à main laser peuvent associer ces données avec des récepteurs passifs de lumière visible - qui enregistrent les textures et les couleurs - pour reconstituer (voir Rétro-ingénierie) une modélisation complète en 3D du modèle.
Le logiciel David LaserScanner qui permettait de transformer une caméra numérique ou une webcam et un laser en scanner 3D manuel à très bas coût a été racheté par Hewlett Packard en 2016[4].
Scanner à lumière structurée
Les scanners 3D à lumière structurée projettent un motif lumineux sur le sujet et en observent la déformation. Le motif peut être à une ou deux dimensions.
Prenons l'exemple d'une ligne comme motif unidimensionnel. Elle est projetée sur le sujet à l'aide d'un vidéoprojecteur LCD ou laser. Une caméra légèrement décalée du projecteur, enregistre son éventuelle déformation. Une technique similaire à la triangulation est utilisée pour calculer la distance, et donc la position des points la représentant. Le motif balaie le champ de vision afin d'enregistrer, une bande à la fois, les informations relatives aux distances.
Prenons maintenant l'exemple d'un motif en forme de grille ou de bande. Une caméra est utilisée pour enregistrer les déformations et un programme informatique complexe sert à calculer les distances des points composant ce motif. La complexité est due à l'ambigüité. Prenons un groupe de bandes verticales balayant horizontalement un sujet. Dans le cas le plus simple, l'analyse repose sur la présomption que la séquence des bandes visibles de gauche à droite corresponde à celle de l'image laser projetée, de telle sorte que l'image de la bande la plus à gauche est bien la première de la projection du laser, la suivante est le seconde et ainsi de suite. Dans le cas de cibles non-triviales comportant des trous, des occlusions, des changements de profondeur rapide, cependant, l'ordre n'est plus forcément vérifié du fait que des bandes sont souvent masquées et peuvent même apparaitre dans un ordre différent, donnant lieu à une ambigüité des bandes lasers. Ce problème spécifique a récemment été résolu par une avancée technique appelée "Multistripe laser Triangulation (MLT)" (en: Triangulation laser multibande). Le scannage 3D à lumière structurée est encore un domaine de recherche actif donnant lieu à de nombreuses publications chaque année.
Le point fort des scanners 3D à lumière structurée est sa rapidité. Au lieu de scanner un point à la fois, ils scannent tout le champ de vision à la fois. Ceci limite ou élimine les problèmes de distorsion liés au mouvement. Des systèmes existants sont capables de scanner des objets en mouvement en temps réel. Récemment, Song Zhang et Peisen Huang de l'Université de Stony Brook ont mis au point un scanner à la volée utilisant une projection d'une frange numérique et une technique à phase modulée (une autre méthode à lumière structurée). Ce système est capable de saisir, de reconstruire et de restituer les détails d'objets se déformant dans le temps (comme une expression faciale) à une fréquence de 40 images par seconde[5].
Scanner à lumière modulée
Les scanners 3D à lumière modulée éclairent le sujet à l'aide d'une lumière changeante (voir Spatial Light Modulator). Habituellement, la source de lumière a un cycle dont l'amplitude décrit un motif sinusoïdal. Une caméra détecte la lumière réfléchie, mesure l'importance de sa variation et détermine la distance que la lumière a parcourue. La lumière modulée permet également au scanner d'ignorer la source de lumière autre que celle d'un laser, de telle sorte qu'il n'y a pas d'interférence.
Scanner sans contact passif
Les scanners sans contact passifs, n'étant émetteur d'aucun type de rayonnement, se basent sur la détection de rayonnement ambiant réfléchi. La plupart des scanners de ce type détectent la lumière visible car elle est immédiatement disponible. D'autres types de rayonnement, comme les infrarouges peuvent également être utilisés. Les méthodes passives peuvent être bon marché, du fait que dans la majorité des cas elles ne nécessitent pas d'appareil d'émission spécifique.
Scanners stéréoscopiques
Les systèmes stéréoscopiques utilisent généralement deux caméras vidéos, légèrement espacées, pointant vers la même scène. En analysant les légères différences entre les images des deux appareils, il est possible de déterminer la distance de chaque point de l'image. Cette méthode est basée sur la vision stéréoscopique humaine[6].
Scanners à silhouette
Ces types de scanners 3D utilisent les contours créés à partir d'une séquence de photos prises autour d'un objet en trois dimensions devant un arrière-plan contrasté. Ces silhouettes sont détachées de leur fond et assemblées les unes aux autres à l'endroit de l'axe de rotation de la caméra pour former une « coque visuelle » une approximation de l'objet. Avec ce type de techniques toutes sortes de concavité de l'objet - comme l'intérieur d'un bol - ne sont pas détectées.
Scanners demandant l'assistance de l'utilisateur
Il y a d'autres méthodes, basées sur une détection et une identification assistées par l'utilisateur de caractéristiques et de formes d'une série de différentes images d'un objet, qui permettent de construire une approximation de celui-ci. Ce type de techniques est utile pour réaliser rapidement une approximation d'un objet composé de formes simples comme des bâtiments. Différents logiciels commerciaux en sont capables comme iModeller, D-Sculptor ou RealViz-ImageModeler.
Ces types de scanners 3D reposent sur les principes de la photogrammétrie. D'une certaine façon ils utilisent une méthodologie similaire à la photographie panoramique, à ceci près qu'au lieu de prendre des images à partir d'un point fixe pour prendre un panorama, une série d'images à partir de points différents est prise d'un objet fixe afin de le répliquer.
La modélisation des données collectées par le scanner
Les nuages de points produits par des scanners 3D ne sont bien souvent pas utilisables tels quels. La plupart des applications ne les utilisent pas directement, mais se servent à la place d'une modélisation 3D. Cela implique par exemple dans le cadre d'une modélisation polygonale 3D de déterminer et de relier des points adjacents afin de créer une surface continue. Un grand nombre d'algorithmes sont disponibles pour ce travail (par exemple, photomodeler, imagemodel).
Applications
Le traitement matériel et la production
Le scannage laser correspond à une méthode d'échantillonnage d'une surface à l'aide d'une technique laser. Plusieurs domaines d'applications existent, différent les uns des autres principalement par la puissance des lasers utilisés et leurs résultats. Des lasers de faibles puissances sont utilisés quand la surface scannée ne doit pas être altérée c'est-à-dire qu'elle doit être numérisée. Les lasers confocals et 3D permettent d'obtenir des informations sur les surfaces scannées.
En fonction de la puissance du laser, son impact sur les pièces travaillées diffère : les plus faibles puissances sont utilisées pour la gravure laser, où de la matière est partiellement enlevée. Avec des puissances plus élevés, le matériau devient fluide et un soudage laser peut être réalisé, et si la puissance est suffisante pour enlever complètement la matière, alors un découpage laser devient possible.
Aussi pour un prototypage rapide une modélisation 3D est utilisée quand, par exemple, un pièce est créée par la méthode de selective Laser Sintering (frittage laser sélectif sans phase liquide).
Le principe utilisé pour toutes ces applications est toujours le même : un logiciel tournant sur un PC ou sur un système embarqué contrôlant tout le processus est relié à une carte de scanner. Cette carte converti les informations vectorielles reçues en données de mouvement qui sont transmises à la tête du scanner. La tête du scanner est composée de deux miroirs capables de dévier le faisceau laser sur un niveau (coordonnées X et Y). La troisième dimension est - si nécessaire - réalisée par une optique spécifique qui est en mesure de mouvoir le foyer du laser dans l'axe de la profondeur (axe Z).
La troisième dimension est nécessaire pour des applications spéciales comme le prototypage rapide où un objet est construit couche par couche ou pour la gravure sur verre où le laser doit altérer le matériau plus ou moins profondément. Dans ces cas, il est important que le laser ait un foyer aussi fin que possible.
Pour des applications améliorées ou au cours de production à haut débit, des systèmes de scanner comportant plus d'une tête de scan sont utilisés. Pour cela, le logiciel doit précisément contrôler ce qui est réalisé : il est impossible que toutes les têtes disponibles fassent le même travail de gravure en même temps pour finir le plus rapidement ou que les têtes exécutent une tâche unique en parallèle les unes des autres réalisant chacune une partie d'un travail dans le cadre d'une plus grosse œuvre.
Des systèmes de projection à lumière structurée sont également utilisés pour la mesure de la minceur des cellules solaires permettant le calcul du stress des débits excédant le seuil de 2000 wafers par heure[7].
Industrie du bâtiment et ingénierie civile
- Documentation « tels que construit » et mise en plan architecturaux (extérieur - intérieur)
- Maçonnerie et analyses de déformations de structures
- Plans de ponts, d'installations industrielles et de monuments.
- Documentation technique de sites historiques.
- Modélisation 3D d'un site et de sa disposition.
- Contrôle de la qualité.
- Enquête quantitative.
- Reprise d'un plan à partir d'un existant.
- Création d'un modèle d'un état/forme préexistante afin de détecter un changement structurel consécutif à de très fortes contraintes (ex : tremblement de terre, impact sur un véhicule, un feu, une pièce mécanique, etc).
- Suivi des déformations d'une structure, d'un site dans le temps (4D)
- Création de carte SIG (Système d'information géographique) et geomatiques.
- Modélisation « BIM », d'un édifice
Divertissement
Des scanners 3D sont utilisés par l'industrie du divertissement afin de créer des modèles 3D pour les films et les jeux vidéo. Si une représentation physique d'un modèle existe, il est beaucoup plus rapide de le scanner que de le créer manuellement en utilisant un logiciel de modélisation 3D. Souvent, des artistes sculptent un modèle physique et le scannent, plutôt que d'en faire directement une représentation numérique sur un ordinateur[8].
Rétro-ingénierie
La rétro-ingénierie d'un composant mécanique nécessite un modèle numérique précis de l'objet à reproduire. Un modèle peut être représenté plus précisément par un mesh, une surface NURBS plate ou incurvée, ou idéalement, une conception assistée par ordinateur (CAO) d'un modèle solide plutôt que par un groupe de points. Un scanner 3D peut être utilisé pour numériser des composants à formes libres ou ayant des changements progressifs de formes telles que des prismes tandis qu'une machine à mesurer tridimensionnelle est habituellement mise en œuvre uniquement pour prendre des mesures de prismes aux caractéristiques très marquées. Ces coordonnées sont alors retraitées par un logiciel de rétro-ingénierie spécialisé pour générer un modèle.
Patrimoine culturel
De nombreux projets de recherche ont entrepris de scanner des sites historiques et des objets à des fins documentaires et d'analyses.
L'utilisation combinée des techniques de scanners 3D et de l'impression 3D permet la réplication d'objets réels sans l'utilisation des techniques traditionnelles du moulage en plâtre, qui souvent peuvent être dommageable pour être mise en œuvre sur des objets archéologiques fragiles ou précieux.
Michel-Ange
En 1999, deux groupes de recherche distincts commencèrent à scanner des statues de Michel-Ange. L'Université Stanford avec un groupe dirigé par Marc Levoy[9] a utilisé un scanner par triangulation laser construit sur mesure par Cyberware pour enregistrer des statues de Michel-Ange à Florence, notamment le David, le Prigioni et les quatre statues d'une des chapelles des Médicis (Nouvelle sacristie). Les scans ont une résolution de l'ordre d'un point tous les 0,25 mm², suffisamment élevée pour voir les marques du burin de Michel-Ange. Ces scans détaillés produisent une très grande quantité de données (plus de 32 gigabits) et leur retraitement a duré cinq mois. À peu près au même moment un groupe de recherche d'IBM, dirigé par H. Rushmeier et F. Bernardini, a scanné la Pietà de Florence enregistrant les détails des formes et des couleurs.
Monticello
En 2002, David Luebke et al. ont scanné la maison de Monticello de Thomas Jefferson[10] à l'aide d'un scanner par temps de vol commercial : DeltaSphere 3000. Les données ont été combinées plus tard avec des couleurs provenant de photos numériques pour créer la maison virtuelle de Monticello. Le cabinet virtuel de Jefferson a été exposé dans le musée de La Nouvelle-Orléans en 2003. Cette exposition simulait une fenêtre ouverte sur la bibliothèque de Jefferson. Elle consistait en une projection sur un mur que le spectateur muni de lunettes stéréoscopiques regardait. Les lunettes équipées de filtres polarisants, combinées aux projecteurs émettant une lumière polarisée restituaient un effet en 3D. Un matériel de tracking pour les lunettes permettait d'adapter la projection au déplacement du spectateur, créant l'illusion que l'écran était en fait une ouverture dans le mur donnant sur la bibliothèque.
Tablettes cunéiformes
En 2003, Subodh Kumar et al. entreprirent de scanner en 3D d'antiques tablettes cunéiformes[11]. Un scanner laser par triangulation a été utilisé, une fois de plus. Les tablettes ont été scannées en suivant un motif régulier de grille à une résolution de 0,025 mm.
La maquette de Rome (Il Plastico)
En 2005, Gabriele Guidi et al. scannèrent Il Plastico[12], une maquette de la Rome antique créée par Italo Gismondi. Ni la méthode par triangulation ni celle par temps de vol n'étaient suffisantes pour atteindre les objectifs du projet car la maquette était à la fois grande et contenait de petits détails. Ils trouvèrent cependant qu'un scanner à lumière modulée était capable de scanner un objet de la taille de la maquette avec la précision voulue. Le scanner était cependant assisté par un autre utilisant la triangulation sur une partie du sujet.
CFAO dentaire
De nombreux systèmes latéraux CFAO de fauteuil de dentiste et de systèmes CFAO de laboratoire dentaire utilisent des techniques de scanner 3D pour enregistrer la surface des préparations (soit in vivo ou in vitro), afin de créer un modèle numérique en utilisant un logiciel de CAO et de reconstruire la dent en utilisant une technique de fabrication assistée par ordinateur (comme celle d'une fraiseuse à commande numérique, ou d'une imprimante 3D). Les systèmes latéraux de fauteuil de dentiste sont conçus pour faciliter l'enregistrement en 3D de la préparation in vivo et de permettre une reconstruction (à l'aide d'une couronne, de soins d'odontologie conservatrice ou d'un placage).
Conception et fabrication assistées par ordinateur d'orthèses
Beaucoup d'orthésistes utilisent également des scanners pour enregistrer la forme d'un patient. Cette technique supplante peu à peu celle du fastidieux moulage en plâtre. Des logiciels de CFAO sont utilisés pour créer et fabriquer les orthèses ou prothèses.
Assurance qualité
La numérisation d'objets existants est d'une importance capitale dans différents domaines d'application. Cette méthode est essentiellement utilisée dans l'assurance qualité de l'industrie afin de mesurer la précision des dimensions géométriques. Les processus industriels comme l'assemblage sont complexes, très automatisés et fondés sur la CAO (conception assistée par ordinateur). L'ennui est que le même niveau d'automatisation est requis pour l'assurance qualité. Par exemple, l'assemblage d'une voiture moderne est une tâche très complexe, en effet cela consiste à monter de nombreux éléments ensemble tout à la fin de la chaine de production. La performance optimale de ce processus est garantie par les systèmes d'assurance qualité. Plus particulièrement, la géométrie des pièces métalliques doit être contrôlée dans le but de s'assurer qu'elles ont les bonnes dimensions, s'assemblent ensemble et finalement fonctionnent bien.
Dans les processus hautement automatisés, les mesures géométriques générées sont transmises aux machines construisant l'objet voulu. À cause des incertitudes et de l'abrasion, le résultat peut différer du modèle numérique d'origine. Afin d'automatiser la capture et d'évaluer ces écarts, l'objet créé doit également être numérisé. Pour cela, des scanners 3D servent à générer des échantillonnages de coordonnées de points de sa surface pour être comparés au modèle. Des scanners tactiles et optiques sont utilisés pour acquérir les mesures tridimensionnelles. La petite taille et la simplicité de construction du second, travaillant sans frottement, permet une souplesse d'utilisation, et remplace de plus en plus le scanner tactile dont la fiabilité est reconnue.
Notes et références
- (en) Fausto Bernardini, Holly E. Rushmeier, The 3D Model Acquisition Pipeline, New-York, Computer Graphic Forum, Volume n°21, n°2, p.149-172,2002 [lire en ligne].
- Roy Mayer, Scientific Canadian: Invention and Innovation From Canada's National Research Council, Vancouver: Raincoast Books, 1999.
- François Blais, Michel Picard, Guy Godin, "Accurate 3D acquisition of freely moving objects," Proceedings. 2nd International Symposium on 3D Data Processing, Visualization and Transmission, 2004, pp.422-429.
- (en) « HP Acquiring David Company’s 3D-Scanning Solutions », sur wirthconsulting.org, (consulté le )
- (en) Song Zhang, Peisen Huang, High-resolution, real-time 3-D shape measurement, Optical Engineering, 2006, pp.123601. [lire en ligne]
- (en) David Young, Teach file of "Stéréoscopic vision and perspective projection", Université du Sussex, Sussex computer vision, jan 1994, [lire en ligne]
- (en) W. J. Walecki, F. Szondy and M. M. Hilali, "Fast in-line surface topography metrology enabling stress calculation for solar cell manufacturing for throughput in excess of 2000 wafers per hour" 2008 Meas. Sci. Technol. 19 025302 (6pp) doi:10.1088/0957-0233/19/2/025302
- (fr) « Anne Hidalgo scannée en 3D lors du festival Futur en Seine 2013 », sur Shapelize
- (en) Marc Levoy, Jeremy Ginsberg, Jonathan Shade, Duane Fulk, Kari Pulli, Brian Curless, Szymon Rusinkiewicz, David Koller, Lucas Pereira, Matt Ginzton, Sean Anderson, James Davis, The Digital Michelangelo Project : 3D Scanning of Large Statues, Proceedings of the 27th annual conference on Computer graphics and interactive techniques, 2000, pp.131-144. [lire en ligne]
- David Luebke, Christopher Lutz, Rui Wang, and Cliff Woolley, www.cs.virginia.edu, Scanning Monticello, 2002, [lire en ligne].
- Subodh Kumar, Dean Snyder, Donald Duncan, Jonathan Cohen, Jerry Cooper, igital Preservation of Ancient Cuneiform Tablets Using 3D-Scanning, Fourth International Conference on 3-D Digital Imaging and Modeling, 2003, p.326-333.
- (en) Gabriele Guidi, Laura Micoli, Michele Russo, Bernard Frischer, Monica De Simone, Alessandro Spinetti, Luca Carosso, 3D digitization of a large model of imperial Rome, Fifth International Conference on 3-D Digital Imaging and Modeling, 2005, p.565-572.
Voir aussi
Articles connexes
Liens externes
 Portail de l’imagerie numérique
Portail de l’imagerie numérique