Système d'équations linéaires
En mathématiques et particulièrement en algèbre linéaire, un système d'équations linéaires est un système d'équations constitué d'équations linéaires qui portent sur les mêmes inconnues. Par exemple :

Le problème est de trouver les valeurs des inconnues , et qui satisfassent les trois équations simultanément.



La résolution des systèmes d'équations linéaires appartient aux problèmes les plus anciens dans les mathématiques et ceux-ci apparaissent dans beaucoup de domaines, comme en traitement numérique du signal, en optimisation linéaire, ou dans l'approximation de problèmes non linéaires en analyse numérique. Un moyen efficace de résoudre un système d'équations linéaires est donné par l'élimination de Gauss-Jordan ou par la décomposition de Cholesky ou encore par la décomposition LU. Dans les cas simples, la règle de Cramer peut également être appliquée.
Définitions mathématiques
En général, un système de m équations linéaires à n inconnues peut être écrit sous la forme suivante :

Où sont les inconnues et les nombres sont les coefficients du système.


- Exemple
Un système de 2 équations linéaires à 2 inconnues est un système de la forme

Résoudre , c'est trouver toutes les valeurs qu'il faut donner à chaque inconnue en même temps pour que toutes les égalités soient vraies.

Un système d'équations linéaires peut aussi s'écrire sous la forme matricielle :

avec :

Système homogène
Un système de la forme :

est appelé système d'équations linéaires homogènes. Tous les systèmes homogènes admettent au moins une solution :

Cette solution est la solution nulle ou triviale.
Nombre de solutions d’un système d'équations
Si le corps est infini (comme c'est le cas pour les nombres réels et pour les nombres complexes) alors seulement les trois cas suivants sont possibles pour n'importe quel système donné d'équations linéaires à n inconnues :
- le système n'a pas de solution (pour un système homogène, ce cas est impossible) ;
- le système a un unique n-uplet solution ;
- le système a une infinité de n-uplets solutions (pour un système homogène comportant strictement moins de n équations, on est toujours dans ce 3e cas).
Il n'existe de règle plus précise que pour un système d'équations linéaires indépendantes à n inconnues. Il existe alors :
- aucune solution lorsque le nombre d'équations est strictement supérieur à n ;
- une unique solution lorsque le nombre d'équations est égal à n ;
- une infinité de solutions (sur un corps infini) lorsque le nombre d'équations est strictement inférieur à n (par exemple, résoudre un système de deux équations cartésiennes de plans sécants, dans un espace affine de dimension n = 3, consiste à fournir une équation paramétrique de la droite intersection de ces deux plans).
Exemple d'équation à 2 inconnues ayant une infinité de solutions
L'équation a une infinité de solutions. Si l'on prend pour la valeur , on obtient :



- ;
- ;
- ;
- .




Plus généralement, cette équation détermine la valeur de pour n'importe quel choix d'une valeur de :


Systèmes de 2 équations linéaires à 2 inconnues
Le type le plus simple de système linéaire implique deux équations et deux variables :
On peut résoudre un tel système par substitution et par combinaisons linéaires
Interprétation graphique
Celle-ci va nous permettre d'établir des théorèmes utiles pour la suite.
Chaque équation du système définit une fonction affine, et est donc représentée par une droite dans un repère. Or :
- les coordonnées du point d'intersection des deux droites représentent la solution de ;
- deux droites ont :
- soit un unique point d'intersection ;
- soit aucun point d'intersection ;
- soit une infinité de points d'intersection.
D'où le théorème suivant :
Théorème 1 : Le système a :
- soit une unique solution ;
- soit aucune solution ;
- soit une infinité de solutions.
On démontre aussi le théorème suivant :
Théorème 2 : Le système admet une seule solution si, et seulement si, le nombre est non nul.

On appelle le déterminant du système .
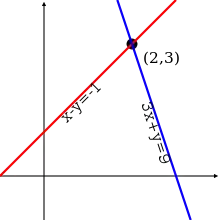
Exemple de résolution graphique : Soit le système

La première équation équivaut à (voir supra).

La deuxième équation équivaut à :
- ;
- ;
- .



En traçant les droites d'équations respectives et , on voit que leur point d'intersection est . La solution du système est et .




Résolution algébrique
L'élimination de Gauss-Jordan, mentionnée ci-dessous, s'applique à tous ces systèmes, même si les coefficients viennent d'un corps arbitraire.
Il existe deux méthodes a priori différentes, mais qui reposent sur le même principe de base : élimination d'une inconnue. Détaillons-les sur un exemple.
Méthode par substitution
Reprenons par exemple le système :

La première équation permet d'exprimer en fonction de . Plus précisément, elle est équivalente à (voir supra). Remplaçons donc par dans la deuxième équation. On a :


Le système est donc équivalent à :

En remplaçant par dans la première équation, on obtient : .


Le système a donc une unique solution : le couple .

Méthode par combinaison ou élimination
Cette méthode est aussi appelée « méthode par combinaison linéaire ».
Exemple : Reprenons le système

On obtient un système équivalent en conservant la première ligne et en multipliant la seconde par 2 puis en lui ajoutant la première, de façon à éliminer . Le système devient :
- , c'est-à-dire


puis (par addition) :
- , c'est-à-dire


Remplaçons par dans la première ligne. Elle devient :

- ;
- ;
- ;
- .




Le système initial est donc équivalent à

On retrouve ainsi qu'il a une unique solution : le couple .
Cas général
D'une manière générale, un système de la forme

dont le déterminant est non nul a pour unique solution :

Système de 3 équations à 3 inconnues
Les systèmes de 3 équations à 3 inconnues se résolvent aussi de cette manière :
Méthode par substitution
- .

Pour résoudre ce système de 3 équations à 3 inconnues, on isole une inconnue dans une des équations. Dans ce système, on isole l'inconnue x dans l'équation [1]
- [1] : .

Maintenant on remplace l'inconnue dans les équations [2] et [3], qui donne un système de 2 équations à 2 inconnues à résoudre.
- .

Après avoir trouvé et , on les remplace dans l'équation [1] pour trouver .

Méthode par élimination

Pour résoudre ce système, on peut éliminer par exemple dans les équations [2] et [3] en les remplaçant par les équations [2'] := –2 × [1] + [2] et [3'] := [1] + [3]. Puisque cette transformation est réversible ([2] = [2'] + 2 × [1] et [3] = [3'] – 1), le système initial est équivalent au nouveau système

Il suffit alors d'éliminer une autre inconnue, par exemple dans l'équation [3'], en remplaçant cette dernière (là encore, de façon réversible) par 4 × [3'] + [2']. Le système est donc équivalent au système suivant, qui est échelonné (et même triangulaire) :

L'équation [3"] détermine qui, remplacé dans l'équation [2'], détermine . Ces deux valeurs, remplacées dans l'équation [1], déterminent .
Cette méthode se généralise à des systèmes comportant davantage d'équations et davantage d'inconnues et prend le nom de méthode du pivot de Gauss.
Notes et références
- Cet article est partiellement ou en totalité issu de l'article intitulé « Système d'équations (mathématiques élémentaires) » (voir la liste des auteurs).
 Portail de l’algèbre
Portail de l’algèbre