Transformations de Galilée
En physique, une transformation de Galilée correspond aux formules de transformations des coordonnées spatiales et temporelle entre deux référentiels galiléens donnés. Tout référentiel en mouvement de translation rectiligne et uniforme par rapport à un référentiel donné supposé galiléen, est lui-même galiléen. Une telle transformation laisse invariantes les équations de la mécanique newtonienne, mais pas celles de la dynamique relativiste ou les équations de Maxwell.
L'ensemble des transformations de Galilée constitue un groupe continu de transformations qui possède la structure de groupe de Lie à dix dimensions, appelée groupe de Galilée. Il s'agit du groupe d'invariance des équations de la mécanique classique non-relativiste (dite aussi newtonienne), et peut s'interpréter comme le produit direct de trois sous-groupes de Lie correspondant respectivement aux translations dans l'espace et le temps (groupe isomorphe à ), aux rotations d'espace (groupe isomorphe au groupe spécial orthogonal SO(3)[1] ) et aux transformations « propres » de Galilée (groupe isomorphe à ).


Les transformations de Galilée constituent un cas limite des transformations de Lorentz, dans le cas de vitesses faibles devant celle de la lumière.
Expressions de la transformation de Galilée
Position du problème - hypothèse du temps absolu
Étant donnés un référentiel (R) supposé galiléen, et un second référentiel (R') en mouvement de translation rectiligne uniforme de vitesse par rapport à (R), l'objet de la transformation de Galilée est de déterminer comment se transforment les coordonnées de temps et d'espace d'un même évènement, notées dans (R) et dans (R'), lors du changement de référentiel.



Dans le cadre de la mécanique newtonienne, le temps possède un caractère absolu, autrement dit si les origines des dates des horloges associées à chacun des référentiels sont identiques, on aura , formule d'ailleurs valable même si les deux référentiels ne sont pas galiléens, et quel que soit leur mouvement relatif.

Cette hypothèse du temps absolu, invalide dans le cas relativiste, correspond de façon plus générale à l'invariance de la durée entre deux évènements survenant aux dates et dans (R), lors du changement de référentiel:



- .

Physiquement cette invariance de la durée entre deux évènements a pour corollaire le caractère absolu de la simultanéité : deux évènements simultanés dans un référentiel (R) le seront également dans tout référentiel (R').
Mathématiquement, elle implique de façon plus générale la formule de transformation suivante, tenant compte d'une éventuelle translation dans le temps (origines des dates différentes entre les deux référentiels):
- ,

où est l'avance de l'horloge associée à (R') par rapport à celle associée à (R). Cette formule de transformation traduit en fait l'invariance des équations de la mécanique newtonienne par translation dans le temps, c'est-à-dire de l'uniformité du temps: tous les instants sont équivalents.

Transformation propre de Galilée
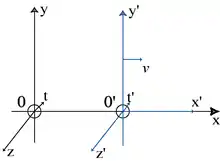
Le cas le plus simple de transformation de Galilée consiste à considérer la situation où les repères d'espace associés respectivement à (R) et (R') sont choisis de telle sorte que leurs origines O et O' coïncident à l'origine commune des dates t et t' dans chacun des référentiels, et que les trois axes soient colinéaires, (R') se déplaçant le long de la direction Ox à la vitesse v constante (cf. figure ci-contre).
Dans ce cas les formules de transformation entre les coordonnées[2] sont données par :

Dans le cas où les repères d'espace associés à (R) et (R') gardent leurs axes colinéaires, mais où le mouvement de translation de (R') par rapport à (R) se fait avec la vitesse de direction arbitraire les formules précédentes se généralisent sous la forme :

Ces équations de la transformation sont le cas particulier (et plus simple) des transformations de Lorentz où le paramètre c, la vitesse de la lumière, serait infinie. On sait que ce n'est pas le cas, mais elles restent suffisamment bonnes (et, par conséquent, la mécanique newtonienne reste valable) tant que la vitesse relative des référentiels est assez petite par rapport à la vitesse de la lumière. Sinon, il faut appliquer au groupe les transformations de Lorentz et adopter la relativité restreinte.
Transformations générales des coordonnées spatiales
Pour ce qui est des coordonnées spatiales, la condition impérative que doivent respecter les formules de transformation est de laisser invariante (le carré de) la distance entre deux évènements simultanés infiniment proches et , soit la condition . Toutefois les transformations qui peuvent être considérées devront respecter les principes d'homogénéité et d'isotropie de l'espace, i.e. que tous les points et directions de l'espace sont équivalents, c'est-à-dire l'invariance par translation spatiale et par rotation des équations de la mécanique[3].




Par suite, ne pourront être prises en compte que les seules transformations qui sont des combinaisons linéaires des coordonnées d'espace et éventuellement du temps, et linéaires par rapport à la vitesse de translation entre (R') et (R).
Si seules sont prises en compte les transformations géométriques, il est évident qu'une simple translation de l'origine des coordonnées entre les deux référentiels, soit , où est le vecteur définissant cette translation, laisse invariant .


Le seconde possibilité est celle d'une rotation pure des axes[4] définie par la matrice telle que , qui doit donc respecter la condition:


- , soit ,


où est la matrice transposée de et la matrice identité à 3 dimensions. Ceci implique que , donc que soit une matrice orthogonale, dont l'ensemble forme un groupe isomorphe au groupe orthogonal O(3). Cependant la nécessité d'exclure les rotations inversant le sens des axes conduit à se restreindre au seul groupe spécial orthogonal SO(3).



Enfin la dernière possibilité correspond à la transformation de Galilée proprement dite, traduisant l'effet du mouvement de translation uniforme de (R') par rapport à (R). Celle-ci a déjà été donnée dans le paragraphe précédent :
- .

Résumé: cas général
Le cas le plus général de transformation (inhomogène) de Galilée, laissant invariants à la fois la durée et le carré de la distance est donc donné par la combinaison des translations dans l'espace (définies par et le temps (définies par ), des rotations spatiales (définies par la matrice orthogonale A) et du mouvement de translation rectiligne et uniforme "pur" entre les deux référentiels:





En fait, A et le quadrivecteur correspondent au changement de base dans l'espace affine qu'il faut opérer pour qu'au temps t = 0, le repère associé à (R) soit "envoyé" sur celui associé à (R').


Groupe de Galilée
Il est facile de vérifier que l'ensemble des transformations de Galilée constitue un groupe continu, noté SGal(3), appelé groupe de Galilée, qui est donc le groupe d'invariance des équations de la mécanique classique non-relativiste. Il est possible de distinguer trois sous-groupes au sein de SGal(3).
Translations dans le temps et l'espace
Le cas des translations dans l'espace et du temps, sans rotation des axes ni mouvement relatif des deux référentiels, correspond au choix de , , soit aux formules de transformation:



correspond à un sous-ensemble de SGal(3), constituant lui-même un groupe commutatif. En effet, l'élément inverse est la transformation définie par le quadrivecteur , l'élément neutre le quadrivecteur , et dont l'associativité et la commutativité sont évidentes (liées à l'addition vectorielle en fait). Ce sous-groupe est en fait isomorphe à , soit à l'addition (quadri-)vectorielle.


Rotations spatiales
Ce cas correspond au choix et , dès lors:


Il évident que l'ensemble de ces transformations constitue un sous-groupe de SGal(3), constituant lui-même un groupe non-commutatif, évidemment isomorphe au groupe de Lie non-abélien SO(3).
Transformations propres de Galilée
Ce cas correspond à celui d'un mouvement de translation rectiligne uniforme de (R') par rapport à (R), les axes des repères d'espaces restant colinéaires et ayant leurs origines d'espace qui coïncident à l'origine commune des dates, ce qui donne les formules de transformation de Galilée au sens propre:
Là encore, il est évident que l'ensemble de ces transformations constitue un sous-ensemble de SGal(3) qui est lui-même un groupe commutatif, isomorphe à celui de l'addition vectorielle ordinaire, soit à .
Cas général
D'après ce qui précède le groupe de Galilée est isomorphe au produit direct des trois sous-groupes précédents, soit à . Il constitue donc un groupe de Lie non-commutatif de dimension 10.

Notes et références
- On se limite aux rotations d'espace laissant inchangées l'orientation des repères d'espace associées aux deux référentiels.
- Parfois appelée "transformation spéciale de Galilée" par analogie avec la transformation spéciale de Lorentz, qui part des mêmes hypothèses concernant les référentiels.
- Cf. notamment Lev Landau et Evgueni Lifchits, Physique théorique, t. 1 : Mécanique [détail des éditions].
- Dans le cas relativiste, il est possible de considérer des (pseudo-)rotations "mixant" coordonnées temporelle et spatiales.
 Portail de la physique
Portail de la physique