فيلة (مسبار فضائي)
فِيَلَة (بالإنجليزية: Philae) هو مسبار هبوط غير متحرك من دون عجلات كان محمولا على ظهر مركبة الفضاء روسيتا مُعدّا للهبوط على سطح المذنب شوريموف-غيرايزمنكو في يوم 12 نوفمبر 2014 . أرسل بهدف دراسة طبيعة المذنب ومكوناته وتم الهبوط على سطحه في تمام الساعة 16:08 UTC منذ ذلك اليوم. بعد رحلة استغرقت ما يقارب العشر سنوات على ظهر المركبة الفضائية الحاملة روسيتا. و سُمّي المسبار «فيلة» تيمنًا بجزيرة فيلة (جزيرة أنس) الواقعة في نهر النيل، وهي المنطقة التي عُثر فيها على المسلة الفرعونية التي ساعدت هي و حجر رشيد على فك شيفرة الكتابة الهيروغليفية، خاصةً أن هناك مشاركة لعلماء مصريين في هذا المشروع.[4]
| فيلة | |
|---|---|
فيلة (مسبار فضائي) |
|
| طبيعة المهمة | مذنب مركبة الإنزال (مركبة فضائية) |
| المشغل | وكالة الفضاء الأوروبية / مركز الطيران والفضاء الألماني |
| رمز التعريف الفلكي | 2004-006C[1] |
| الموقع الإلكتروني | www |
| مدة المهمة | Planned: 1-6 weeks Hibernation: 15 November 2014 – 13 June 2015 |
| خصائص المركبات الفضائية | |
| وزن الإطلاق | 100 كـغ (220 رطل)[1] |
| الحمولة | 21 كـغ (46 رطل)[1] |
| الأبعاد | 1 × 1 × 0.8 م (3.3 × 3.3 × 2.6 قدم)[1] |
| الطاقة | 32 watts at 3 وحدة فلكية[2] |
| الطاقم | ؟؟؟ |
| بداية المهمة | |
| تاريخ الإطلاق | 2 March 2004, 07:17 UTC |
| الصاروخ | أريان 5 V-158 |
| موقع الإطلاق | مركز جويانا للفضاء إيلا-3 [الإنجليزية] |
| المقاول | أريان سبيس |
| تاريخ الهبوط | 12 نوفمبر 2014[3]، و12 نوفمبر 2014 |
.jpg.webp)
المسبار استخدم المركبة روسيتا كمحطة بث بينه وبين الأرض وذلك لتقليل الطاقة الكهربائية اللازمة لنقل الإشارات اللاسلكية . و سيعمل المسبار على سطح المذنب لمدة أسبوع على الأقل مع إمكانية تمديد الفترة إلى عدة أسابيع في حالة عمل الألواح الشمسية كما هو مخطط لها . بُني المسبار بإشراف وكالة الفضاء الألمانية (DLR) بواسطة إيسا مع مساهمة من قبل النمسا وفنلندا وفرنسا والمجر وأيرلندا وإيطاليا والمملكة المتحدة.
التصميم
يتكون المسبار من ثلاثة وحدات أساسية مصنوعة من ألياف الكربون وهي: «صفيحة قاعدية» تعمل على المحافظة على استقرارية المركبة آليًا. «منصة الأجهزة» و بنيت سداسية الشكل لربط جميع الوحدات الأخرى معًا، كما أن سطح المركبة غُطي بخلايا شمسية تعمل على توليد الطاقة الكهربائية.
المسبار مصصم للهبوط باستخدام ثلاثة أرجل ستفتح حالما سيقذف نفسه من المركبة الأم روسيتا بأوامر منها حيث الأرجل الثلاثة ستخفف من الطاقة الناتجة من ارتطام المركبة بالسطح مع قدرتها على تدوير جسم المركبة أو إمالته أو رفعه لإعادته إلى شكله الأولي من جديد. كما أن الأرجل مزودة بحربة ستطلق حال هبوط فيلة على السطح وذلك لتثبيته ومنعه من الانفصال من المذنب نتيجة الجاذبية الضعيفة.
خطط في البداية لتكون البعثة موجهة نحو المذنب فيرتانين لكن لاحقًا بسبب تأخر إقلاع الصاروخ أريان 5 في موعده استلزم تغيير الهدف إلى المذنب شوريموف-غيرايزمنكو حيث في هذه الحالة أصبحت سرعة الهبوط أعلى نتيجة كبر كتلة المذنب الجديد عن سابقه، لذلك أصبح تعديل فرامل الهبوط أمرًا ضروريًا.
الأجهزة العلمية
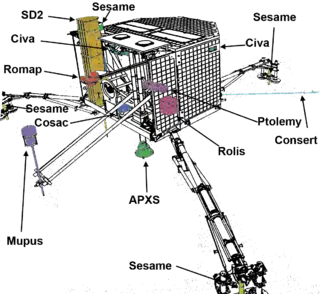
تتألف الحمولة العلمية على متن فيلة من تسع أجهزة يبلغ وزنها الإجمالي 27 كيلوغرام تقريبًا، أي ثلث وزن المركبة. أما الأجهزة فهي:
- APXS: سيحلل التركيب الكيميائي لمكونات السطح. يعتبر الجهاز نسخة محسنة عن APXS المستخدم في بعثة مارس باثفايندر.
- CIVA: يتكون من ست كاميرات صغيرة تعمل على تكوين صورة بانورامية لسطح المذنب. كما أن الجهاز سيدرس تركيب وقوام وانعكاسية العينة التي تم الحصول عليها من السطح.
- COSAC: يتكون من كروماتوجرافيا الغاز ومطياف للكتلة. سيقوم COSAC بتحليل مكونات العينات المأخوذة من السطح والمواد المتطايرة من المذنب، كما أنه سيساعد في استكشاف الجزيئات العضوية المعقدة فيها.
- SD: الجهاز قادر على الحفر لعمق 20 سنتيمترًا أسفل سطح المذنب لجمع عينة ترابية ومن ثم نقلها إلى داخل المسبار بغرض فحصها لاحقًا.
- CONSERT: رادار سيقوم بدراسة التركيب الداخلي لنواة المذنب من خلال قياس الأمواج الكهرومغناطيسية المتولدة بواسطة فيلة وروسيتا حول المذنب لكي يتم تحديد مكوناتها الداخلية.
- PTOLEMY: محلل غازات متطور يستخدم للحصول على النسبة الدقيقة للنظائر المشعة في عناصر الخفيفة.
- ROLIS: كاميرا CCD تستخدم للتصوير أثناء الهبوط. كما أنها ستستعمل لتكوين صورة بانورامية للمنطقة التي ستفحص لاحقًا بواسطة الأجهزة الأخرى على متن فيلة.
- MUPUS: مجموعة من المجسات مركّبة على حربة الهبوط وتستخدم لتحديد درجة الحرارة والكثافة والخواص الميكانيكية الخارجية للسطح.
- ROMAP: مقياس للمغناطيسية ومراقب للبلازما مخصص لدراسة الحقول المغناطيسية للمذنب وتفاعل الرياح الشمسية مع جسم المذنب.
- SESAME: الجهاز سيدرس الطبقة الخارجية للمذنب من خلال ثلاث وحدات ثانوية هي:
- وحدة (CASSE) لاستكشاف الطريقة التي تنتقل بها الأصوات عبر السطح.
- وحدة (PP) لدراسة الخصائص الكهربائية للمذنب.
- وحدة (DIM) لقياس مقدار الغبار الذي يرتد مرة أخرى على سطح المذنب.
المهمة
على عكس ديب إمباكت مهمة فيلة ليست مهمة تصادمية بل هي تهدف إلى إنزال مركبة فضائية بنجاح على سطح مذنب ومن ثم إعادة معلومات منها إلى الأرض. فحصت الأجهزة على متن المسبار في عام 2006 حيث تبين أنها لا تعاني من أي مشكلة رئيسية. لاحقا تم استخدام بعض منها لأول مرة في السابع والعشرون من فبراير 2007 أثناء مرور المركبة روسيتا من المريخ. حيث قام فيلة بالتقاط عدد من الصور وأخذ قياسات للغلاف المغناطيسي للمريخ بواسطة جهاز ROMAP ، لكن معظم الأجهزة الأخرى تحتاج إلى تلامس مع سطح المذنب لكي تقوم بعملها لذلك بقيت على حالها دون فحص.
في الثامن من يونيو من عام 2011 تم إدخال المسبار فيلة مع المركبة الأم روسيتا في وضعية سبات لمدة 32 شهرًا و ذلك نظرًا لابتعادهما عن الشمس بمسافة تقدر 9 ملايين كيلومتر حيث في هذه المسافة سيصبح من الصعب للألواح الشمسية أن تنتج الطاقة الكهربائية.
في مارس من عام 2014 تم إيقاظ فيلة من سباته حيث فور أفاقت المسبار بدأ المشرفين عليه بفحص أجهزته العلمية للتأكد من سلامتها حيث أكدت الفحوصات سلامتها جميعها.
في السادس من أغسطس استطاعت روسيتا الوصول إلى شوريموف-غرايزمنكو حيث يتوجب على روسيتا خلال هذه المرحلة الاقتراب نحو سطح المذنب إلى مسافة 30 كيلومتر حتى تتمكن من إنزال فيلة عليه لذلك بدأت روسيتا سلسلة من المناورات تمكنها من تقليص المسافة بينها و بين المذنب إلى 30 كيلومتر. خلال تلك المناورات بدأت المركبة بتكوين خريطة شاملة لسطح المذنب، وقياس درجة حرارته وكمية الغبار المتصاعد منها، واتجاه دورانه بالنسبة للشمس وكتلة المذنب وجاذبيته حيث جميع تلك العوامل ستساعد في اختيار الموقع المناسب للهبوط.
في 25 من أغسطس تم الإعلان عن خمسة مناطق مفترضة للهبوط تم تعيينها وفق المعلومات المكتسبة خلال الأسبوعيين الأوليين من لقاء روسيتا بالمذنب شوريموف-غرايزمنكو وتم اختيار تلك المناطق وفق الشروط التالية:
- قلة انحدار السطح و ميلانه.
- إمكانية الحفاظ على التواصل اللاسلكي بين المسبار فيلة وروسيتا
- قلة احتواء منطقة الهبوط على الصخور .
- وجود ضوء كاف يمكن فيلة من شحن بطاريته.
قام المشرفون بإعطاء أسماء افتراضية لتلك المناطق وهي: منطقة J ، منطقة J ، منطقة A ، منطقة I
لاحقاً في 15 من سبتمبر من عام 2014 تم اختيار منطقة J للهبوط حيث تقع تلك المنطقة في اللب الصغير للمذنب وتتميز بقلّة الصخور ووجود إضاءة كافية كما أن وكالة الفضاء الأوروبية قامت بانتخاب منطقة C والواقعة في اللب الكبير للمذنب كمنطقة احتياطية للهبوط في حال حصول خطأ أثناء عملية إطلاق المسبار.
في 26 من سبتمبر تم تعيين الثاني عشر من نوفمبر كموعد افتراضي لإطلاق المسبار فيلة من روسيتا نحو مصيره وذلك في تمام الساعة 8:35 وفق توقيت العالمي ومن مسافه تقدر بـ 22 كيلو متر حيث ستستغرق فترة الهبوط سبعة ساعات تقريبًا. أما في حال حدوث أي طارئ فسيتم تغيير موعد اللإطلاق لإلى 13:04 بالتوقيت العالمي ونحو منطقة C.
في 22 من أكتوبر تم إعطاء اسم Agilkia لمنطقة الهبوط والتي كانت معروفة رمزيا باسم «المنطقة J» و ذلك من خلال مسابقة نظمتها كل من إيسا ووكالة الفضاء الألمانية والفرنسية و الإيطالية حيث اقترح هذا الاسم من قبل أكثر من 150 شخصًا ممن شاركوا في هذه المسابقة.
ليلة هبوط المسبار

خلال الفترة الممتدة من الحادي عشر إلى الثاني عشر من نوفمبر شرعت وكالة الفضاء الأوروبية بسلسلة من الفحوصات و ذلك ضمن إطار تحضير المسبار للإنفصال عن المركبة الأم روسيتا ورغم أن تلك الفحوصات بيّنت أن مدافع غاز النايتروجين لن تستطيع العمل حاليا إلا أنه في الثانية عشر من نوفمبر من عام 2014 أُعطيت الأوامر بإطلاق فيلة من روسيتا وفق الجدول، و في تمام الساعة 8:35 بالتوقيت العالمي حيث تم التأكد من نجاح العملية لاحقا في الساعة 9:03 .
و جرت تلك العملية بسلاسة ومن دون أي مشكلة تذكر ما عدى دوران المسبار حول نفسه نتيجة القوة الناتجة عن القذف الذي بدوره لا يشكل أي خطر على عملية الهبوط.
في الساعة 11:00 أرسلت روسيتا إشارة من المسبار فيلة تؤكد فيه بدء المسبار بإلتقاط الصور و نشر أرجله الثلاث استعداداً لمرحلة الهبوط .
.jpg.webp)
في الساعة 16:00 تلقت كل من محطة مالاروي في الأرجنتين و محطة مدريد التابعتين لناسا إشارة تؤكد فيه نجاح المسبار بالهبوط على سطح المذنب شوريموف-غرايزمنكو لتكون فيلة بذلك أول مسبار فضائي يحط على سطح مذنب، لكن لسوء الحظ تبين لاحقاً أن المسامير الثلجية والحراب لم تطلق من المسبار نحو السطح لتثبيتها مما تسبب بارتداد فيلة عن السطح و بالتالي تغيير موقعه. وقد صرح ستيفن أولامك (مدير مهمة المسبار فيلة لدى وكالة الفضاء الألمانية) : «هذا يعني أننا من الممكن قد هبطنا مرتين على المذنب و ليس مرة واحدة».
كما أن فيلة تمكنت أثناء النزول من التقاط عدد من الصور العالية الوضوح توثق منطقة هبوط المسبار، حيث تبين خلالها أراض مليئة بالحفر والصخور والمنحدرات.
فيلة على سطح المذنب 67P
من خلال البيانات الأولية التي أرسلت لاحقا من قبل المسبار فيلة تبين أن للمذنب سطح ناعم، أنعم مما توقع العلماء مما أدى إلى ارتداد المركبة مرتين عن السطح و بالتالي الهبوط ثلاث مرات على المذنب حيث كل ذلك أدى إلى ابتعاد المسبار عن موقع هبوطه المفترض بكيلومتر واحد ليستقر أخيراً في منطقة قليلة الإضاءة و في هذه الحالة لن يحصل فيله من أصل 12 ساعة (و هي فترة النهار في المذنب) سوى على ساعة و نصف من ضوء الشمس، و هذا المقدار لا يعد كافيا لشحن البطارية الثانوية و التي تعتمد في شحنها على الطاقة الشمسية . و ما زاد الأمر سوءا هو وجود المسبار تحت ظل صخرة كبيرة تحجب عنه الشمس الشيء الذي سيؤثر على عمليات الشحن .
استطاع المسبار العمل على سطح المذنب لثلاثة أيام معتمدا على بطاريته الرئيسية الذي وفِرت له نحو 60 ساعة من العمل فقط ، حيث بدأ المسبار منذ اليوم الأول بإجراء أولى مهامه و التي شملت أخذ صوره بانورامية لمنطقة الهبوط ، وإرسال بيانات عن تحليلاته الكيميائية والفيزيائية التي قام بها أثناء هبوطه على المذنب حيث اخترق ما يحيطه من عازات . أما عملية حفر أرضية المذنب فلم تفلح حيث أن المسبار يرتكز على رجلين اثنتين في وضع مائل بدلاً من ارتكازه على ثلاثة أرجل. حاول العلماء أن يجعلوا أجهزة الحفارة تعمل بحيث تضع بعض العينات في جهاز الكرموتوغراف COSAC لتحليلها ومعرفة مكوناتها، ولكن الجهاز لم يتلقى شيئا.
كل ما نعرفه حاليا (يوليو 2015) بالنسبة لتكوين المذنب أنه متكون من عدة طبقات، الخارجية منها رخوة وتحتها طبقة جليد صلبة منهت الحفارة من اختراقها .
في يونيو 2015 بدأ الاتصال بين روسيتا والمسبار ، ويوجد الآن المذنب في طريقه إلى أقرب نقطة بينه وبين الشمس حبث يصلها يوم 13 أغسطس 2015 ، ويأمل العلماء الحصول على أهم المعلومات خلال تلك الفترة وحتى نهاية سبتمبر ، حيث يزداد تأثير الشمس على المذنب وكذلك يزداد شحن بطارية المسبار بواسطة الأشعة الشمسية.

العمليات على سطح المذنب وفقدان الاتصال
في صباح 14 نوفمبر 2014 كان متوقعاً أن توفر شحنة البطارية الطاقة اللازمة للقيام بالعمليات المختلفة حتى نهاية اليوم. وبعد الحصول على البيانات من المعدات التي لم تشتمل المهام الموكلة إليها القيام بعمليات الحفر في التربة (والتي تشكل 80% من إجمالي التجارب العلمية المخطط لها) بدأ كل من الجهاز MUPUS مخترق التربة وجهاز الحفر SD2 بالعمل. بعد ذلك تم إرسال البيانات التي حصل عليها MUPUS وكذلك الجهاز COSAC وPtolmy إلى روزيتا. كما تم إرسال جملة من بيانات الجهاز CONSERT لدى نهاية القيام بالعمليات المطلوبة. خلال فترة إرسال البيانات المسائية رُفع فيلة بمقدار 4 سم وأُدير 35° بغاية توجيه الألواح الشمسية نحو الشمس في المستقبل. بعد ذلك بفترة قليلة انخفضت الطاقة الكهربائية بشكل سريع وأُجبرت المعدات العلمية على إيقاف عملها. وانخفض كمية البيانات المرسلة إلى روزيتا حتى توقفت تماماً. وقطع الاتصال به في تمام الساعة 00:36 حسب توقيت العالمي في 15 نوفمبر 2014 ليدخل بذلك فيلة في سبات عميق للمرة الثانية.
أكد تحليل البيانات القادمة من فيلة أن MUPUS لم يقم بالحفر عميقاً تحت التربة ذلك أن التربة كانت قاسية كالجليد على خلاف المتوقع بأن تكون هشة نوعاً ما، كما لم يتم تسليم عينات التربة إلى الجهاز COSAC.
هناك احتمال قائم لإعادة الاتصال بفيلة خلال شهر أغسطس من عام 2015 حيث سيقترب المذنب خلال هذا التاريخ أكثر من الشمس مما يعني زيادة في كمية الضوء اللازم للالواح الشمسية وإعادة شحن البطاريات.
المصادر
- "Philae"، National Space Science Data Center، مؤرشف من الأصل في 13 نوفمبر 2016، اطلع عليه بتاريخ 18 نوفمبر 2014.
- "Philae lander fact sheet" (PDF)، مركز الطيران والفضاء الألماني، مؤرشف من الأصل (PDF) في 10 سبتمبر 2016، اطلع عليه بتاريخ 28 يناير 2014.
- http://blogs.esa.int/rosetta/2014/11/28/did-philae-graze-a-crater-rim-during-its-first-bounce/
- حجي: الإعلام اهتم بـ«العنتيل» وأهمل مشاركة مصريين في هبوط مركبة على مذنب لأول مرة بالتاريخ. المصري اليوم. بتاريخ 13 نوفمبر 2014. تاريخ الوصول: 13 نوفمبر 2014. نسخة محفوظة 01 ديسمبر 2017 على موقع واي باك مشين.
- الصفحة الرئيسية لمهمة روسيتا .
| مواضيع رئيسية |
|
|---|---|
| دفاع |
|
| مسابر فضائية | |
| تعقب أ ق م أ |
|
| منظمات |
|
| تهديدات محتملة |
|
| أفلام وڤيديو |
|
 بوابة استكشاف
بوابة استكشاف بوابة الفضاء
بوابة الفضاء بوابة رحلات فضائية
بوابة رحلات فضائية بوابة علم الفلك
بوابة علم الفلك بوابة كواكب صغيرة ومذنبات
بوابة كواكب صغيرة ومذنبات
الفضاء في 2016 | |||||||
|---|---|---|---|---|---|---|---|
| مركبات فضائية |
| 
 | |||||
| أجرام قريبة من الأرض |
| ||||||
| كواكب |
| ||||||
| اكتشافات |
| ||||||
| استكشاف الفضاء | |||||||
| |||||||
