SOFAR channel
The SOFAR channel (short for sound fixing and ranging channel), or deep sound channel (DSC),[1] is a horizontal layer of water in the ocean at which depth the speed of sound is at its minimum. The SOFAR channel acts as a waveguide for sound, and low frequency sound waves within the channel may travel thousands of miles before dissipating. An example was reception of coded signals generated by the Navy chartered ocean surveillance vessel Cory Chouest off Heard Island, located in the southern Indian Ocean (between Africa, Australia and Antarctica), by hydrophones in portions of all five major ocean basins and as distant as the North Atlantic and North Pacific.[2][3][4][note 1]
This phenomenon is an important factor in ocean surveillance.[5][6][7] The deep sound channel was discovered and described independently by Maurice Ewing and J. Lamar Worzel at Columbia University and Leonid Brekhovskikh at the Lebedev Physics Institute in the 1940s.[8][9] In testing the concept in 1944 Ewing and Worzel hung a hydrophone from Saluda, a sailing vessel assigned to the Underwater Sound Laboratory, with a second ship setting off explosive charges up to 900 nmi (1,000 mi; 1,700 km) away.[10][11]
Principle
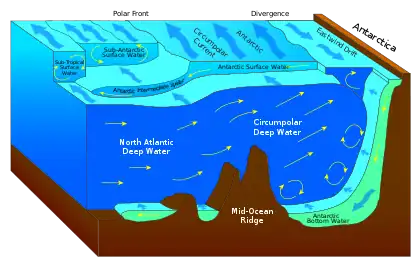
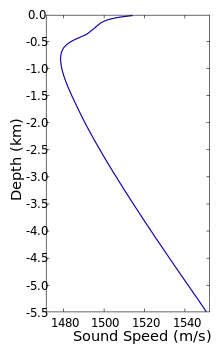
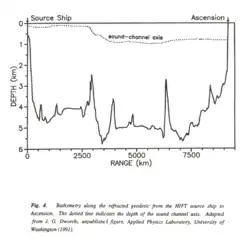
Temperature is the dominant factor in determining the speed of sound in the ocean. In areas of higher temperatures (e.g. near the ocean surface), there is higher sound speed. Temperature decreases with depth, with sound speed decreasing accordingly until temperature becomes stable and pressure becomes the dominant factor. The axis of the SOFAR channel lies at the point of minimum sound speed at a depth where pressure begins dominating temperature and sound speed increases. This point is at the bottom of the thermocline and the top of the deep isothermal layer and thus has some seasonal variance. Other acoustic ducts exist, particularly in the upper mixed layer, but the ray paths lose energy with either surface or bottom reflections. In the SOFAR channel, low frequencies, in particular, are refracted back into the duct so that energy loss is small and the sound travels thousands of miles.[9][12][13] Analysis of Heard Island Feasibility Test data received by the Ascension Island Missile Impact Locating System hydrophones at an intermediate range of 9,200 km (5,700 mi; 5,000 nmi) from the source found surprisingly high signal-to-noise ratios, ranging from 19 to 30 dB, with unexpected phase stability and amplitude variability after a travel time of about 1 hour, 44 minutes and 17 seconds.[3]
Within the duct sound waves trace a path that oscillates across the SOFAR channel axis so that a single signal will have multiple arrival times with a signature of multiple pulses climaxing in a sharply defined end.[10][note 2] That sharply defined end representing a near axial arrival path is sometimes termed the SOFAR finale and the earlier ones the SOFAR symphony.[14][15] Those effects are due to the larger sound channel in which ray paths are contained between the surface and critical depth.[note 3] Critical depth is the point below the sound speed minimum axis where sound speed increases to equal the maximum speed above the axis. Where bottom lies above critical depth the sound is attenuated, as is any ray path intersecting surface or bottom.[16][17][18][note 4]
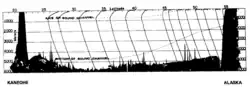
The channel axis varies most with its location reaching the surface and disappearing at high latitudes (above about 60°N or below 60°S) but with sound then traveling in a surface duct. A 1980 report by Naval Ocean Systems Center gives examples in a study of a great circle acoustic path between Perth, Australia and Bermuda with data at eight locations along the path. At both Perth and Bermuda the sound channel axis occurs at a depth of around 1,200 m (3,937 ft). Where the path meets the Antarctic convergence at 52º south there is no deep sound channel but a 30 m (98 ft) in depth surface duct and a shallow sound channel at 200 m (656 ft). As the path turns northward, a station at 43º south, 16º east showed the profile reverting to the SOFAR type at 800 m (2,625 ft).[19][20]
Applications
The first practical application began development during World War II when the United States Navy began experimenting and implementing the capability to locate the explosion of a SOFAR bomb used as a distress signal by downed pilots. The difference in arrival times of the source at an unknown location at known locations allowed computation of the source's general location.[10] The arrival times form hyperbolic lines of position similar to LORAN. The reverse, detection of timed signals from known shore positions at an unknown point, allowed calculation of the position at that point. That technique was given the name of SOFAR backwards: RAFOS. RAFOS is defined in the 1962 edition of The American Practical Navigator among the hyperbolic navigation systems.[10][21][22]
The early applications relied on fixed shore stations, often termed SOFAR stations. Several became acoustic research facilities as did the Bermuda SOFAR Station which was involved in the Perth to Bermuda experiment.[19][20] The records of the Bermuda station are maintained by the Woods Hole Oceanographic Institute (WHOI).[23] In the recent past SOFAR sources were deployed for special purposes in the RAFOS application. One such system deployed bottom moored sources off Cape Hatteras, off Bermuda and one on a seamount to send three precisely timed signals a day to provide approximately five-kilometre (3.1 mi; 2.7 nmi) accuracy.[24]
The first application quickly became of intense interest to the Navy for reasons other than locating downed air crews. A Navy decision in 1949 led to studies by 1950 recommending the passive sonar potential of the SOFAR channel be exploited for the Navy's Anti-Submarine Warfare (ASW) effort. The recommendation included one that $10 million a year be spent on research and development of the system. By 1951 a test array had proven the concept and by 1952 additional stations were ordered for the Atlantic. The first major exploitation of the SOFAR channel was to ocean surveillance in a classified program that led to the Sound Surveillance System (SOSUS). That system remained classified from inception until the fixed systems were augmented by mobile arrays to become the Integrated Undersea Surveillance System with the mission and nature of the system declassified in 1991.[7][25][note 5]
Earthquake monitoring through the use of SOSUS after limited civilian access was granted to the Pacific Marine Environmental Laboratory (PMEL) of the National Oceanic and Atmospheric Administration in 1991 revealed ten times the number of offshore earthquakes with better localization than with land-based sensors. The SOSUS detection could sense earthquakes at about magnitude two rather than magnitude four. The system detected seafloor spreading and magma events in the Juan de Fuca Ridge in time for research vessels to investigate. As a result of that success, PMEL developed its own hydrophones for deployment worldwide to be suspended in the SOFAR channel by a float and anchor system.[26]
Other applications
- Comprehensive Nuclear-Test-Ban Treaty Organization (CTBTO) - International Monitoring System (IMS)[27]
- Missile Impact Location System (MILS): System to localize impact and location of test missile nose cones[5]
- Ocean acoustic tomography: A technique to measure ocean temperatures and currents by the time delay of sounds between two distant instruments
- Project Mogul, based on the conjectured existence of a similar channel in the upper atmosphere
- Search for Malaysia Airlines Flight 370: Sounds carried by the SOFAR channel were analyzed to determine if they detected a possible ocean impact of a passenger jet that disappeared in the Southern Indian Ocean
In nature
Mysterious low-frequency sounds, attributed to fin whales (Balaenoptera physalus), are a common occurrence in the channel. Scientists believe fin whales may dive down to this channel and sing to communicate with other fin whales many kilometers away.[28]
Popular culture
The novel The Hunt for Red October describes the use of the SOFAR channel in submarine detection.
Footnotes
- Figure 1 of the reference "The Heard Island Feasibility Test" (Munk) shows ray paths to receiving locations. Table 1 lists the sites with one being a Canadian research vessel with a towed array off Cape Cod.
- The "History of the SOFAR Channel" reference has a recording and sonogram of the effect.
- The term also has a biological oceanography application.
- Figure 2 on page three of the Williams/Stephen/Smith reference is helpful in understanding critical depth, the SOFAR channel, the entire channel and the ray paths involved.
- It is not entirely coincidental that some of the SOSUS shore facilities, termed Naval Facilities (NAVFAC), were located in the vicinity of older SOFAR stations. For example Naval Facility Bermuda and Naval Facility Point Sur. The local acoustics were already well known.
See also
References
- Navy Supplement to the DOD Dictionary of Military and Associated Terms (PDF). Department Of The Navy. June 2012. Archived (PDF) from the original on April 15, 2021. Retrieved 23 October 2021.
- Munk, Walter H.; Spindel, Robert C.; Baggeroer, Arthur; Birdsall, Theodore G. (20 May 1994). "The Heard Island Feasibility Test" (PDF). Journal of the Acoustical Society of America. Acoustical Society of America. 96 (4): 2330–2342. Bibcode:1994ASAJ...96.2330M. doi:10.1121/1.410105. Retrieved 26 September 2020.
- NOAA AOML (February 1993). Reception At Ascension Island, South Atlantic, of the Transmissions From The Heard Island Feasibility Test (NOAA Technical Memorandum ERL AOML-73) (PDF) (Report). Miami, Florida: National Oceanic and Atmospheric Administration, Atlantic Oceanographic and Meteorological Laboratory. Retrieved 26 September 2020.
- Military Sealift Command (2008). "MSC 2008 in Review — Ocean Surveillance Ships". Military Sealift Command. Archived from the original on 10 February 2018. Retrieved 28 September 2020.
- Cone, Bruce E. (1 July 1976). The United States Air Force Eastern Test Range — Range Instrumentation Handbook (PDF). Patrick Air Force Base, Florida: Eastern Test Range, Directorate of Range Operations. p. 1-1. Archived (PDF) from the original on February 27, 2021. Retrieved 12 September 2020.
- De Geer, Lars-Erik; Wright, Christopher (September 22, 2019). "From Sheep to Sound Waves, the Data Confirms a Nuclear Test". Foreign Policy. Washington, DC: FP Group, Graham Holdings Company. Retrieved 23 September 2020.
- "Integrated Undersea Surveillance System (IUSS) History 1950 - 2010". IUSS/CAESAR Alumni Association. Retrieved 25 September 2020.
- "William Maurice Ewing (1906-1974)" (PDF). Washington, D.C.: National Academy of Sciences. 1980: 136–137. Retrieved 25 September 2020.
{{cite journal}}: Cite journal requires|journal=(help) - Kaharl, Victoria (March 1999). "Sounding Out the Ocean's Secrets" (PDF). Washington, D.C.: National Academy of Sciences. Retrieved 25 September 2020.
{{cite journal}}: Cite journal requires|journal=(help) - "History of the SOFAR Channel". University of Rhode Island and Inner Space Center. 2020. Retrieved 26 September 2020.
- Naval History And Heritage Command. "Saluda". Dictionary of American Naval Fighting Ships. Naval History And Heritage Command. Retrieved 26 September 2020.
- Helber, Robert; Barron, Charlie N.; Carnes, Michael R.; Zingarelli, R. A. Evaluating the Sonic Layer Depth Relative to the Mixed Layer Depth (PDF) (Report). Stennis Space Center, MS: Naval Research Laboratory, Oceanography Division. Archived (PDF) from the original on September 11, 2021. Retrieved 26 September 2020.
- Thompson, Scott R. (December 2009). Sound Propagation Considerations for a Deep-Ocean Acoustic Network (PDF) (Master’s Thesis). Monterey, CA: Naval Postgraduate School. Archived (PDF) from the original on September 11, 2021. Retrieved 26 September 2020.
- Spindel, Robert C. (2004). "Fifteen years of long‐range propagation experiments in the North Pacific". The Journal of the Acoustical Society of America. 116 (4): 2608. Bibcode:2004ASAJ..116.2608S. doi:10.1121/1.4785400. Retrieved 26 September 2020.
- Dzieciuch, Matthew; Munk, Walter; Rudnick, Daniel L. (2004). "Propagation of sound through a spicy ocean, the SOFAR overture". The Journal of the Acoustical Society of America. 116 (3): 1447–1462. Bibcode:2004ASAJ..116.1447D. doi:10.1121/1.1772397. Retrieved 26 September 2020.
- Williams, Clare M.; Stephen, Ralph A.; Smith, Deborah K. (15 June 2006). "Hydroacoustic events located at the intersection of the Atlantis (30°N) and Kane (23°40′N) Transform Faults with the Mid‐Atlantic Ridge". Geochemistry, Geophysics, Geosystems. American Geophysical Union. 7 (6): 3–4. doi:10.1029/2005GC001127. S2CID 128431632. Retrieved 27 September 2020.
- Fenner, Don F.; Cronin, William J. Jr. (1978). Bearing Stake Exercise: Sound Speed and Other Environmental Variability (PDF) (Report). NSTL Station, MS: Naval Ocean Research and Development Activity (NORDA). p. 3. Archived (PDF) from the original on March 4, 2016. Retrieved 26 September 2020.
- Baggeroer, Arthur B.; Scheer, Edward K. (2010). Oceanographic Variability and the Performance of Passive and Active Sonars in the Philippine Sea (PDF) (Report). Retrieved 27 September 2020.
- Dushaw, Brian D (10 April 2012). The 1960 Perth to Bermuda antipodal acoustic propagation experiment: A measure of a half-century of ocean warming? (PDF) (Report). Retrieved 26 September 2020.
- Northrop, J.; Hartdegen, C. (August 1980). Underwater Sound Propagation Paths Between Perth, Australia and Bermuda: Theory and Experiment (PDF) (Report). San Diego, CA: Naval Ocean Systems Center. pp. 3–6. Archived (PDF) from the original on November 9, 2020. Retrieved 24 September 2020.
{{cite report}}: CS1 maint: date and year (link) - Thomas, Paul D. (1960). Use of Artificial Satellites for Navigation and Oceanographic Surveys (Report). Washington, D.C.: U.S. Coast and Geodetic Survey. p. 7. Retrieved 26 September 2020.
- The American Practical Navigator. Washington, D.C.: U.S. Navy Hydrographic Office. 1962. p. 347.
- "Bermuda SOFAR Station Drum Records". WHOI Data Library and Archives. Retrieved 26 September 2020.
- Thomas, Rossby H. (1987). "The RAFOS Navigation System". Proceedings International Symposium on Marine Positioning. Dordrecht: Springer. p. 311. doi:10.1007/978-94-009-3885-4_30. ISBN 978-94-010-8226-6.
- Smith, Deborah H. (August 3, 2004). "Ears in the Ocean". Oceanus. Woods Hole Oceanographic Institution. Retrieved 26 September 2020.
- Dziak, Bob (August 2008). PMEL/Vents Ocean Acoustics (PDF) (Report). Pacific Marine Environmental Laboratory. Retrieved 26 September 2020.
- Lawrence, Martin W. (November 2004). "Acoustic Monitoring of the Global Ocean for the CTBT" (PDF). Retrieved 25 September 2020.
{{cite journal}}: Cite journal requires|journal=(help) - Orientation by Means of Long Range Acoustic Signaling in Baleen Whales, R. Payne, D. Webb, in Annals NY Acad. Sci., 188: 110–41 (1971)
External links
- The SOFAR or deep sound channel, from NOAA
- How is sound used to study undersea earthquakes? (Recording of the March 11, 2011 Honshu, Japan earthquake recorded at a hydrophone located near the Aleutian Islands)
- A sound pipeline, from the National Academy of Sciences
- SOSUS, the "Secret Weapon" of Underwater Surveillance by Edward C. Whitman. Undersea Warfare
- Richard Muller, UC Berkeley – lecture on waves, SOFAR and the Roswell UFO Incident