Regulación automática
La regulación automática es una rama de la ingeniería que se ocupa del control de un proceso en un estado determinado; por ejemplo, mantener la temperatura de una calefacción, el rumbo de un avión o la velocidad de un automóvil en un valor establecido.
La regulación automática, también llamada teoría de control, estudia el comportamiento de los sistemas dinámicos, tratándolos como cajas o bloques con una entrada y una salida. En general, la entrada al sistema es una señal analógica o digital que se capta en algún punto del sistema. Los bloques intermedios representan las diversas acciones perturbadoras que afectan a la señal, como rozamientos en los actuadores, así como el efecto de los elementos de control interpuestos, los reguladores. Estos efectos se suelen representar mediante las funciones matemáticas que los describen, llamadas funciones de transferencia. La salida del sistema se llama referencia y corresponde al valor de la señal tras actuar sobre ella las anteriores funciones de transferencia. Cuando una o más de las variables de salida de un sistema tienen que seguir el valor de una referencia que cambia con el tiempo, se necesita interponer un controlador que manipule los valores de las señales de entrada al sistema hasta obtener el valor deseado de salida.
Historia
Aunque existen diversos tipos de sistemas de control desde la antigüedad, la formalización del dominio de la regulación comenzó con un análisis de la dinámica del regulador centrífugo, dirigida por el físico James Clerk Maxwell en 1868 bajo el título On Governors, Sobre los Reguladores. Aquí describió y analizó el fenómeno de la "caza", en el que retrasos en el sistema pueden provocar una compensación excesiva y un comportamiento inestable. Se generó un fuerte interés sobre el tema, durante el cual el compañero de clase de Maxwell, Edward John Routh, generalizó los resultados de Maxwell para los sistemas lineales en general. Este resultado se conoce con el nombre de Teorema de Routh-Hurwitz.
Una aplicación notable de la teoría de control se encontró en el área del vuelo tripulado. Los hermanos Wright sus primeros vuelos con éxito el 17 de diciembre de 1903 y se distinguían por su habilidad para controlar sus vuelos durante períodos sustanciales, más que por su habilidad para aprovechar el empuje de un perfil alar, que ya era conocido.
Durante la Segunda Guerra Mundial, la teoría de control fue parte importante de los sistemas de control de disparo, sistemas de guiado y electrónicos. La carrera espacial también dependía del control preciso de las naves. Por otra parte, la teoría de control también ha visto un uso creciente en campos como la economía y la sociología.
Sistemas de control
Podemos definir un sistema de control como la combinación de elementos que, actuando sobre una planta o proceso, trata de fijar alguno de sus parámetros o de hacer que varíe, en el transcurso del tiempo, de una forma determinada que se predefine. Para representar esquemáticamente un sistema se utilizan los diagramas de bloques, en los que cada elemento o conjunto de elementos se simboliza con un bloque o rectángulo. Unas flechas indican el sentido de la información, que es único.
La estructura más simple de un sistema de control es la que indica la figura
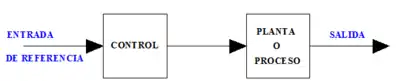
El control automático siempre está integrado por tres operaciones básicas:
- Medida: la medida de la variable a controlar se realiza mediante un sensor, a veces, combinado con un transmisor o un convertidor para adaptar la señal.
- Decisión: basándose en la medida, el controlador debe decidir qué hacer, para mantener la variable en el valor deseado.
- Acción: como resultado de la decisión del controlador, el sistema debe emprender alguna acción. Normalmente la realiza el elemento final u órgano de control.[1]
El sistema de control clásico, emula el control manual que realizamos diariamente en multitud de operaciones: Entramos en la ducha, colocamos una mano bajo la cebolla y abrimos el grifo. Nuestro cerebro recibe una sensación de frío que compara con la de confort que guarda en su memoria. En función de ella manda a la otra mano que empuje la palanca hacia la izquierda, lo que provoca un aumento en la temperatura del agua, que percibe la mano inicial y vuelve a enviar al cerebro para que siga mandando mover la palanca. La secuencia se repite hasta que la sensación recibida se ajusta a la de confort recordada.
En un sistema de control, la mano izquierda se sustituye por un sensor o sonda que mide continuamente la variable a controlar , en este caso la temperatura del agua, y su valor lo envía al cerebro del sistema, llamado controlador o centralita, donde es comparado con el valor que se quiere que alcance la variable, denominado valor de consigna , que se habrá fijado previamente. En función de la diferencia entre medido y deseado, emite una señal de maniobra que envía al órgano de regulación, en este caso la válvula , dotado de un actuador , generalmente un motor o un mecanismo neumático (en el ejemplo la mano derecha). La operación se conoce como lazo o bucle de regulación que en nuestro caso es de tipo cerrado.


En el control de lazo abierto, el controlador recibe una señal que puede ser externa al sistema y, en función de ella, envía una orden al órgano de control, pero no vuelve a recibir información sobre lo que ocurre en el proceso una vez ejecutada la acción. Son sistemas de control en los que el valor actual de la variable no tiene efectos sobre la acción de control. El control deberá, una vez recibida una entrada de referencia, suministrar a la planta o proceso una salida adecuada, para que la magnitud a controlar evolucione de la forma prevista. No se mide la variable, ni se realimenta para compararla con la señal de entrada. Cuando un control está en manual el lazo es abierto.
La magnitud que se introduce desde el exterior se llama magnitud piloto.
El ejemplo más clásico es el control en calefacción de la temperatura de ambiente , aportando más o menos energía en función de la temperatura exterior. El sistema es coherente, ya que en teoría, las pérdidas de calor de un edificio dependen exclusivamente de la temperatura exterior. Según esto a cada temperatura exterior le corresponde una temperatura en los radiadores para mantener la temperatura de ambiente deseada. El inconveniente es que no se tienen en cuenta las perturbaciones o cargas que se puedan producir en el interior de una habitación y que son ajenas al sistema principal: aumento de la ocupación, calor aportado por otros aparatos, etc., de las cuales no dispone de información el sistema y pueden hacer que la variable controlada, en este caso la temperatura, evolucione lejos del valor deseado.
Para evitar los problemas del control en lazo abierto, la teoría de control introduce la realimentación. El regulador de lazo cerrado utiliza la realimentación para controlar los estados y las salidas de un sistema dinámico. El nombre de "lazo cerrado" hace referencia al camino que sigue la información en el sistema: la entrada al proceso (p. ej.: la tensión que se aplica a un motor eléctrico) afecta a la salida del mismo (p. ej.: la velocidad o el par que ofrece el motor). La salida se mide con sensor y una vez comparada con la referencia o consigna, se procesa mediante el controlador o regulador; el resultado, una señal de control, se reenvía a la entrada del proceso, cerrando el lazo.
El control con lazo cerrado presenta las siguientes ventajas sobre el control en lazo abierto:
- corrección de las perturbaciones (tales como rozamiento impredecible en un motor)
- buen comportamiento incluso con incertidumbre en el modelo, es decir, en aquellos casos en que la estructura del modelo no representa perfectamente la realidad del proceso o los parámetros del modelo no se pueden medir con absoluta precisión
- permite estabilizar procesos inestables
- tolerancia a variaciones en los parámetros
La única desventaja del control en lazo cerrado, frente al control en lazo abierto, es que el primero reduce la ganancia total del sistema. Esto lleva al uso conjunto del control en lazo abierto y cerrado, para mejorar el rendimiento.[2]
Estabilidad
La estabilidad del control es la característica del sistema que hace que la variable vuelva al punto de consigna después de una perturbación.[3]
A menudo se define de la siguiente manera: un sistema es estable si, ante cualquier entrada acotada en un intervalo cualquiera de tiempo, la salida también está acotada. La estabilidad, así definida, se conoce como estabilidad BIBO (del inglés Bounded-Input-Bounded-Output) (se puede consultar también la estabilidad según Lyapunov).
Si un sistema es estable según la anterior definición, entonces el sistema no puede "explotar", es decir, ante una entrada finita la salida del sistema no puede tender a infinito en un intervalo todo lo amplio que se quiera. Matemáticamente, esto significa que para que un sistema lineal causal continuo en el tiempo sea estable, todos los polos de su función de transferencia deben
- estar situados en la mitad izquierda del plano complejo si se usa la transformada de Laplace, es decir, su parte real debe ser menor o igual que cero
O BIEN
- estar en la frontera o el interior del círculo de radio unidad si se usa la transformada Z, es decir, su módulo debe ser igual o menor que la unidad
En ambos casos, si el polo tiene parte real estrictamente menor que cero o el módulo es estrictamente menor que uno, es asintóticamente estable. Las variables de un sistema asintóticamente estable siempre disminuyen su valor inicial (salvo por el transitorio inicial) y no muestran oscilaciones permanentes, que sí aparecen cuando el polo tiene parte real exactamente igual a cero o bien el módulo igual a uno. En este último caso se dice que el sistema es simplemente estable. Un sistema estable (o simplemente estable) que nunca decrece ni crece con el tiempo, y no presenta oscilaciones, es marginalmente estable: en este caso tiene polos con componente real nula y componente compleja nula. Si existen polos con parte real nula pero parte imaginaria distinta de cero, aparecen oscilaciones.
Las diferencias entre ambos casos no suponen ninguna contradicción. La transformada de Laplace es en coordenadas cartesianas, mientras que la transformada Z es en coordenadas polares, y se puede demostrar que:
- la parte real negativa en el dominio de Laplace corresponde al interior del círculo unidad en el dominio Z
- la parte real positiva en el dominio de Laplace corresponde al exterior del círculo unidad en el dominio Z.
Si el sistema en cuestión tiene una respuesta impulsional de
![{\displaystyle x[n]=0.5^{n}u[n]\,}](../I/6705b6e8a982510e6d78c741ee87ba13e67beb6a.svg)
considerando la transformada Z de la función anterior en [n] a partir de tablas o de la definición:

que presenta un polo en (parte imaginaria cero). Este sistema es BIBO, es decir, asintóticamente estable, ya que el polo está dentro del círculo unidad.

Sin embargo, si la respuesta impulsional fuera
![{\displaystyle x[n]=1.5^{n}u[n]\,}](../I/18c580eba85d6745c33d397b120bdc5631193515.svg)
entonces la correspondiente transformada Z valdría

que tiene un polo en y no es estable BIBO, puesto que dicho polo tiene módulo estrictemente mayor que uno.

Existen numerosas herramientas para el análisis de los polos de un sistema. Algunas de ellas son procedimientos gráficos, como el estudio del lugar de las raíces, los diagramas de Bode o los diagramas de Nyquist.
Controlabilidad y observabilidad
La controlabilidad y la observabilidad son los aspectos fundamentales de un sistema para poder decidir la mejor estrategia de control en el mismo. La controlabilidad es la posibilidad de llevar el sistema a un estado particular usando una señal de control adecuada. Si un estado no es controlable, entonces ninguna señal de control aplicada podrá nunca llevar al sistema hasta un estado controlable. Por otra parte, la observabilidad es la posibilidad de "adivinar", mediante la observación de las señales de entrada y salida del sistema, el estado interno del sistema. Es decir, si el sistema se encuentra en un estado no observable, el controlador no será capaz de corregir el comportamiento en lazo cerrado si dicho estado no es deseable.
Si se estudian los estados de cada variable del sistema que se va a controlar, cada estado "malo" (desde el punto de vista del control) de dichas variables debe ser controlable y observable para asegurar un funcionamiento correcto del sistema en bucle cerrado. Matemáticamente, si alguno de los autovalores del sistema no es, a la vez, observable y controlable, su efecto en la dinámica del sistema se mantendrá inalterado en el control en lazo cerrado que implementemos. Si dicho autovalor es inestable, su dinámica afectará al sistema en lazo cerrado y lo hará inestable. Los polos no observables no están presentes en la función de transferencia de una representación en el espacio de estados, por lo que a veces se prefieren en el análisis de sistemas dinámicos. Si un polo no observable es inestable, entonces inestabiliza el sistema y, tanto si dicho polo es controlable como si no lo es, el sistema no se podrá estabilizar (debido a que no se puede actuar sobre el polo por no ser observable).
En resumen, un sistema solo será controlable cuando todos los polos inestables del mismo sean a la vez observables y controlables. La solución a problemas de control de sistemas no controlables o no observables suele incluir la adición de actuadores y sensores.
Estrategias de control más frecuentes
Cada sistema de control debe garantizar en primer lugar la estabilidad del comportamiento en lazo cerrado. En los sistemas lineales, esto se puede conseguir directamente mediante asignación de los polos. En los sistemas no lineales hay que recurrir a teorías específicas, habitualmente basadas en la Teoría de Aleksandr Lyapunov para asegurar la estabilidad sin tener en cuenta la dinámica interna del sistema. En función de la especificación de requisitos del sistema (es decir, de las condiciones que deseamos imponer a la salida) se debe escoger una estrategia de control u otra. A continuación se presenta una lista de las técnicas de control más habituales:[4]
- De dos posiciones (todo-nada)
- Todo/nada con banda diferencial
- Flotante
- Proporcional (P)
- Proporcional-integral (PI)
- Proporcional derivada (PD)
- Proporcional-integral-derivada (PID)
Control todo/nada
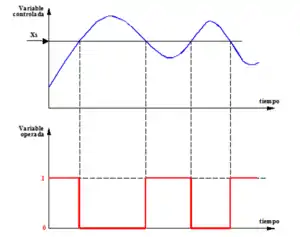
En este caso la señal de control solo se genera cuando el error[5] cambia de signo. El elemento final del control se mueve automáticamente entre una y otra de dos posiciones fijas,[6] para un valor único de la variable controlada
Este regulador permite limitar superior e inferiormente el valor de la variable controlada, pero no lo mantiene en las proximidades del valor de consigna.
control todo/nada con banda diferencial
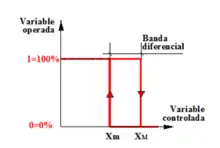
La banda diferencial es una zona neutra. Mientras la variable controlada se mantenga dentro de la banda diferencial, el elemento final del control permanece fijo. Para errores significativamente positivos o negativos, el elemento final toma las posiciones extremas: abierto o cerrado. Los ajustes posibles del control se basan en variar el punto de consigna y la amplitud de la banda diferencial. En muchos aparatos esta última viene ajustada y fijada por el fabricante.
Un ejemplo típico de este caso sería el de un termostato que abre una válvula cuando la temperatura baja de un valor y la cierra cuando alcanza otro. La diferencia entre ambos valores es la banda diferencial o diferencial del termostato. La característica del regulador todo/nada con banda inactiva se puede ver en la figura de la izquierda.
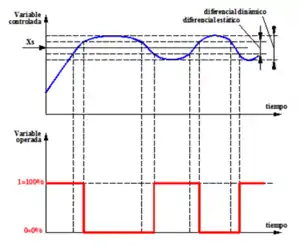
Como los equipos tienen normalmente una inercia,[7] la amplitud del diferencial (diferencial estático) suele ser menor que la amplitud de oscilación de los valores reales de la variable controlada. A esta amplitud se la suele llamar diferencial dinámico o de funcionamiento.
El control todo-nada funciona satisfactoriamente si el proceso es lento, es decir, tiene una gran capacitancia,[8] y un tiempo de retardo[9] mínimo. De cualquier forma, la variable controlada no alcanza nunca el valor de consigna y oscila continuamente entre dos valores por debajo y por encima de este. Cuanto más lento sea el sistema o proceso a controlar más se puede disminuir el diferencial.
Control flotante
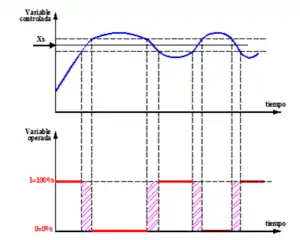
Esta acción tiende a impedir la desviación de la variable controlada fuera de la zona muerta (diferencial estático) establecida. Una regulación todo-nada se puede convertir en una regulación flotante utilizando una válvula motorizada reversible de baja velocidad. La válvula está inmóvil mientras la variable controlada está dentro de la zona muerta y cuando la rebasa, la válvula se mueve en la dirección adecuada, hasta que la variable retorna al interior de la zona muerta. Entre los dos límites de esta zona, la válvula puede detenerse en cualquier posición. Los servomotores que mueven el elemento final de esta forma, se conocen como a tres puntos. Si se elige bien la velocidad, de forma que se compensen las perturbaciones, se pueden minimizar las oscilaciones de la variable controlada. Este sistema no es adecuado si el proceso a controlar tiene un retardo importante, o los cambios de carga, aunque sean pequeños, se producen rápidamente.
La figura representa una regulación de este tipo. En los espacios rayados, el elemento final está parado. Cuando el valor de la variable controlada supera el límite superior, el elemento final se mueve hacia el cierre y viceversa cuando el valor de la variable desciende por debajo del límite inferior.
Control Proporcional (P)
El controlador de acción proporcional abre o cierra la válvula o elemento final de la regulación proporcionalmente al error o diferencia entre el valor de la variable controlada y el de consigna. La señal de control o magnitud de ajuste es proporcional a la señal de error:

El coeficiente de proporcionalidad recibe el nombre de ganancia o sensibilidad. El dispositivo controlado se posiciona proporcionalmente en respuesta a pequeños cambios de la variable controlada; no pasa de manera brusca de una posición máxima a otra posición mínima como ocurre en la acción todo/nada.

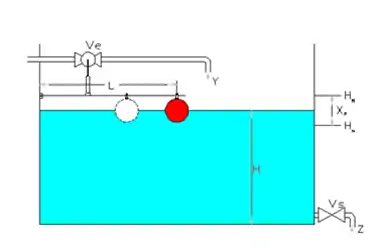
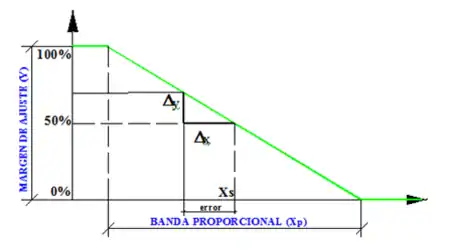
El mejor símil encontrado para explicar este tipo de regulación es el formado por un aljibe en el que se pretende controlar su nivel manteniendo un valor de consigna Cada vez que se produce una perturbación , es decir, cuando aumenta la salida de agua por la válvula , el nivel disminuye, el flotador baja y la válvula se abre proporcionalmente aumentando el caudal de salida . Se obtiene una posición de equilibrio cuando . Cuando el nivel sube y el caudal va disminuyendo hasta alcanzar el nivel HM en el que la válvula cierra completamente. Por el contrario, cuando es máximo, la válvula está abierta completamente cuando el nivel llega a . Por supuesto, el fluido de carga debe ser, al menos, igual a la perturbación máxima .









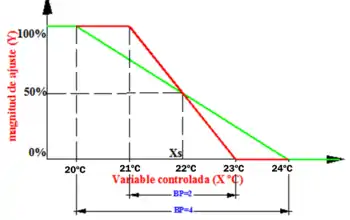
Entre y se obtiene un valor de para cada valor de . La diferencia
es la Banda Proporcional, que expresa la variación de la variable entre los estados totalmente abierta y totalmente cerrada de la válvula de regulación.
Como puede verse, con este sistema no se mantiene el valor de consigna, sino que se obtienen valores estables entre y . A cada uno de estos valores de le corresponde un único valor de , o lo que es lo mismo, una posición única de la válvula de regulación.



Entre el valor de consigna y el realmente obtenido hay siempre una diferencia o error residual (offset) característico de este sistema de regulación. Se puede minorar este error disminuyendo la banda proporcional, lo cual se conseguiría acercando la boya al eje de giro como indica la figura. Sin embargo, de esta forma se corre el riesgo de obtener un gran caudal de salida para una pequeña desviación del nivel, lo que puede dar lugar a una perturbación de sentido contrario, volviéndose inestable el bucle.
Tomemos un ejemplo más cercano, formado por el control de la temperatura ambiente de un local, atemperado mediante un radiador alimentado por agua caliente. El bucle de control estará integrado por un controlador, una sonda de ambiente y una válvula con motor proporcional a la entrada del agua caliente en el radiador. Si elegimos una banda proporcional de 4 °C y una temperatura de consigna de 22 °C, la temperatura ambiente oscilará entre 20 °C, cuando la válvula esté completamente abierta y 24 °C cuando esté completamente cerrada. Si se quiere mejorar la precisión se puede reducir la banda proporcional, por ejemplo a 2 °C, como se ve en la figura. Ahora la temperatura oscilará entre 21º y 23 °C. El límite de reducción dependerá de varios factores:
- De la constante de tiempo del local.[10] Cuanto mayor sea esta menor podrá ser la banda proporcional.
- De la constante de tiempo de la sonda.[11] Cuanto mayor sea esta mayor tendrá que ser la banda proporcional.
- Del tiempo muerto entre la apertura de la válvula y el comienzo del aumento de temperatura del radiador. Cuanto mayor sea este, mayor ha de ser la banda proporcional.
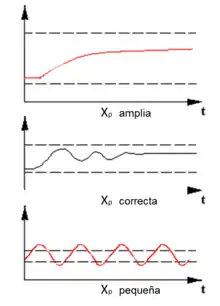
También tiene influencia la característica de la válvula. El comportamiento de la regulación será diferente según la amplitud de la banda proporcional seleccionada. Ver imagen de la izquierda:
- demasiado amplia: la variable controlada alcanza muy lentamente un nuevo punto de equilibrio. La desviación del valor de consigna será grande.
- correcta: la variable controlada alcanza rápidamente el punto de equilibrio. La desviación del valor de consigna será pequeña.
- demasiado pequeña: la regulación fluctúa en exceso, comportándose como un todo/nada.

Existe una banda proporcional mínima por debajo de la cual el regulador actuará de forma parecida a un todo/nada.
En un controlador real existe un determinado margen de ajuste que es el intervalo de valores que puede tomar la variable de operación o también podemos decir, la señal de salida. Teniendo en cuenta que:


Evidentemente:

Es decir, la ganancia es el coeficiente de proporcionalidad entre el margen de ajuste y la banda proporcional.
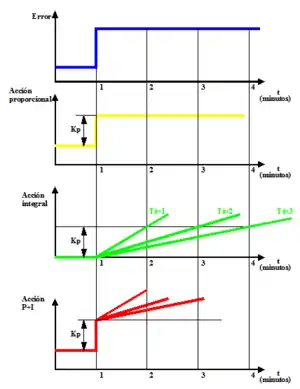
Control integral (I)
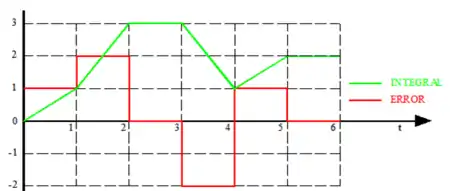
El inconveniente de la regulación proporcional es el offset, pero este no se puede eliminar por la propia concepción del sistema. El regulador integral consigue exactamente el valor consignado y se dice que es un regulador independiente de la carga. Un concepto intuitivo en la acción proporcional, es cambiar la consigna en el regulador para disminuir el Offset, pero si se hace demasiado pronto, no sólo no se elimina la desviación, sino que se crean oscilaciones importantes. Esta operación de corrección de la consigna permitiendo previamente la estabilización del sistema, es lo que hace el regulador integral. En el regulador integral existe una relación entre el error y la velocidad de variación de la magnitud de salida. Si el valor medido y el de consigna coinciden, la velocidad de ajuste se hace cero y el regulador se estabiliza. Dicho de otra forma, el órgano de control se moverá más deprisa[12] cuanto mayor sea el error. En este controlador el valor de la señal de control es proporcional a la integral de la señal de error:

Donde:
- se denomina coeficiente de acción integral.
- es la variación de la magnitud de ajuste
 Salida de regulación integral
Salida de regulación integral - es el error o desviación
- es un intervalo de tiempo




la velocidad de variación de la magnitud de ajuste será igual a:

Que según hemos definido será proporcional al error:

Por lo que para hallar la magnitud de ajuste , deberemos integrar como indicamos al principio. De ahí el nombre que recibe este tipo de regulación y que da lugar a algunos malentendidos.
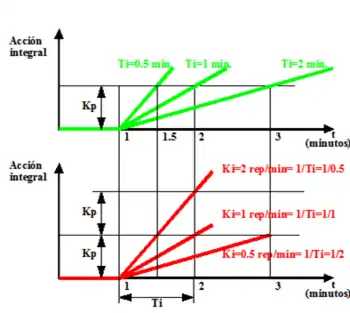
Como se puede observar en la gráfica de la figura superior, el valor de la salida permanece constante cuando la función vale cero[13] De todo esto se deduce que el regulador dará una señal variable hasta que la desviación sea nula, permaneciendo constante a partir de este momento. En el regulador integral, a diferencia del proporcional, cuando el error sea nulo, su salida o acción también será nula.[14] Si se compara la evolución de una función con la de su integral se comprueba que esta última varía más lentamente que la función, por lo que la acción integral es lenta pero muy precisa. El inverso del factor de acción integral es lo que se denomina tiempo de integración
- minutos

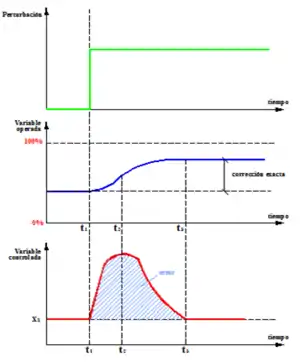
La evolución temporal de las variables controlada y operada cuando se introduce una perturbación, con una regulación integral se ve en la figura de la izquierda.
Por ser la respuesta de la acción integral demasiado lenta se emplea muy raramente como regulador puro y suele emplearse en combinación con la acción proporcional.
Control proporcional integral (PI)
La acción de control, en este caso, viene definida por la siguiente ecuación:

donde es la ganancia.
Esta acción de control está compuesta por la suma de la acción proporcional y la acción integral. La acción proporcional suministra al dispositivo controlado una señal para corregir el error, siempre que este no sea nulo, y la acción integral tiende a eliminar el error residual (offset). Para evitar que por efecto de la acción integral, la salida del controlador devuelva valores extremos, esta acción solo participa cuando la variable controlada se encuentra dentro de la banda proporcional.
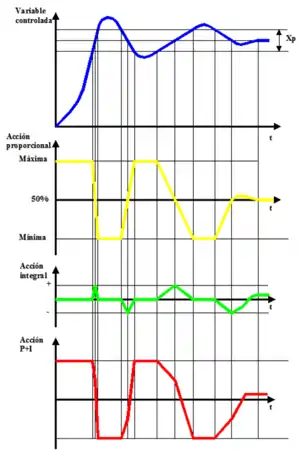
La figura refleja las variaciones de la señal de salida, debidas a cada acción por separado y a la suma de las dos. La primera gráfica muestra las oscilaciones de la variable controlada. En el primer tramo mientras la variable está por debajo de la banda proporcional, la acción proporcional dará una salida máxima (la válvula permanece totalmente abierta), mientras que la acción integral permanece en cero por estar fuera de la banda proporcional. En el segundo tramo la variable crece rápidamente, por lo que la acción proporcional responde cerrando la válvula hasta llegar al extremo de la banda proporcional en el que está totalmente cerrada y así permanece mientras la variable esté sobrepasando el extremo inferior de la Banda Proporcional. La última gráfica es la suma de ambas señales. Sin embargo esta relación entre la magnitud de regulación y la magnitud de ajuste es complicada y en la práctica para estudiarla se hace mediante la respuesta en escalón.
Para un regulador PI se deben seleccionar dos parámetros:
- La banda proporcional
- La constante tiempo de integración

Esta constante es el tiempo que va a tardar la acción en producir la misma variación de la magnitud de ajuste que se ha producido instantáneamente por la acción y se expresa en minutos.



Como ya dijimos que y son inversas:
- Factor de acción Integral

las unidades del factor de acción integral son repeticiones por minuto, es decir, las veces que la componente de acción integral contiene a la componente de acción proporcional en un minuto.
Teniendo en cuenta la definición de , resulta que en el dispositivo de regulación PI:

Siendo :
- = variación de la magnitud de ajuste debida a la acción proporcional
- = variación de la magnitud de ajuste debida a la acción integral
- = variación total de la magnitud de ajuste por ambas acciones



Para el tiempo de integración resulta:

Sustituyendo en la fórmula principal, se llega a:

Que es la misma ecuación del regulador ideal, pero en función del margen de ajuste , de la banda proporcional y del tiempo de integración . En ella se puede observar que una pequeña variación de la banda proporcional o del tiempo de integración puede originar una gran variación en la señal de salida , por lo que se hace imprescindible el ajuste de estos parámetros, si no se quiere correr el riesgo de tener una regulación inestable. Debido a la acción proporcional se produce rápidamente una gran variación de la señal de salida. Después de esa variación rápida, se obtiene una corrección final más lenta, por la acción integral.


Si el tiempo de integración es demasiado largo (velocidad lenta), el sistema tardará mucho tiempo en eliminar la desviación del valor de consigna, si por el contrario es demasiado corto (velocidad rápida) el sistema corre el riesgo de fluctuar, igual que si se elige una banda proporcional demasiado estrecha.
La regulación PI resulta más exacta que la P, ya que no tiene ninguna desviación, pero además es muy adecuada para procesos con pequeños retardos (tiempo muerto+ constante de tiempo), como ocurre normalmente en la temperatura de aire en un conducto o de agua en una tubería. Si no es así, como ocurre con la temperatura ambiente, es más razonable aplicar un regulador P.
Control proporcional integral derivativo (PID)
El regulador PID probablemente sea el diseño de control más empleado. "PID" son las siglas de Proporcional-Integral-Derivativo, y se refiere a los tres términos que operan sobre la señal de error para producir una señal de control. Matemáticamente es la combinación de los tres modos de control expuestos, es decir:

La contribución de cada una de las acciones es:
- La acción proporcional corrige la posición de la variable operada proporcionalmente al error (estabiliza la oscilación natural de la variable controlada).
- La acción integral corrige la posición de la variable operada con una velocidad proporcional al error. Al cabo de un tiempo elimina el offset.
- La acción derivativa corrige la posición de la variable operada proporcionalmente a la velocidad de variación del error para que, después de una variación de la carga, la variable controlada vuelva lo más rápido posible a su valor de consigna.
El control proporcional con acción integral tiene el inconveniente de no tener en cuenta la tendencia del error, es decir, no es capaz de distinguir una situación en la que el error está creciendo, de otra en la que está disminuyendo. La acción derivativa tiene en cuenta los valores futuros del error y es capaz de distinguir los dos casos. Hay procesos en los que puede ser perjudicial la acción derivativa, ya que puede originar una respuesta irregular, a saltos. En ese caso, la acción derivativa debe anularse y adoptar una acción PI. Para anular la acción derivativa basta con hacer igual a cero el parámetro .

En los procesos en los que la acción D no sea perjudicial, la combinación de las tres acciones proporciona una respuesta rápida que alcanza el régimen de equilibrio en poco tiempo. Observando las gráficas de las acciones integral y derivativa se comprueba que tienen igual signo, pero como la acción derivativa se resta, hace que disminuyan las oscilaciones que causa la acción integral. Puesto que la acción D se estabiliza con valor 0, la combinación de ambas mantiene un valor que no es nulo, lo que demuestra que la acción derivativa contribuye a eliminar las oscilaciones de la acción integral sin impedir que se anule el error.
Asignación del lugar de los polos
En los sistemas MIMO (múltiples entradas y salidas) se pueden asignar los lugares de los polos matemáticamente, usando una representación del espacio de estados del sistema en lazo abierto y calculando una matriz de realimentación que asigne a los polos sus posiciones deseadas. En sistemas complicados puede ser necesario un ordenador con capacidad de cálculo, y no siempre se puede asegurar la robustez de la solución. Más aún, en general no se miden todos los estados del sistema y por lo tanto se deben incorporar observadores al diseño del lugar de los polos.
Control óptimo
El control óptimo es una técnica particular de control en la que la señal de control intenta optimizar una determinada función de coste: por ejemplo, en el caso de un satélite, el valor de flujo de los cohetes que permitan llevarlo a la trayectoria deseada con el mínimo consumo de combustible. En las aplicaciones industriales se han usado dos métodos de diseño de control óptimo, ya que se ha demostrado que pueden garantizar estabilidad en lazo cerrado. Son el Control por Modelo Predictivo (MPC) y el Control Gaussiano Lineal Cuadrático (LQG). El primero permite tomar en consideración restricciones aplicables a las señales del sistema, que en muchos procesos industriales es un requisito decisivo. Junto con los reguladores PID, los sistemas MPC son la técnica más usada en el control de procesos.
Véase también
Referencias
- Atecyr. DTIE 11.02(2010).””Regulación y control.”” isbn 978-84-95010-36-0
- IT 1.2.4.3 (|Reglamento de Instalaciones Térmicas en los Edificios Archivado el 21 de octubre de 2012 en Wayback Machine.). El ejemplo de control de la temperatura ambiente en función de la temperatura exterior, es exigido por el R.I.T.E. en todos los sistemas de calefacción central y establece además, que éste deberá complementarse con válvulas termostáticas en los radiadores
- Instrumentación Industrial. Antonio Creus.pag 528-9.8.
- Instrumentación Industrial. Antonio Creus. pag. 491
- es la diferencia en cada momento entre el valor actual y el de consigna
- On-off, Abierto-cerrado, etc. Cuando se trata del control de un fluido, el elemento final suele ser una válvula de solenoide
- Por ejemplo, la inercia térmica interior de un edificio, determinada por la masa y constitución de las particiones interiores, incluyendo las capas internas de los muros exteriores, así como los objetos y mobiliario, amortigua las variaciones de la temperatura ambiente interior y constituye una característica muy importante a la hora de definir, tanto los equipos térmicos como los elementos de control, si se quiere proveer de una gestión energética adecuada al edificio.
- La capacitancia se puede expresar como la cantidad de fluido de control que hace falta para que la variable controlada varíe en una unidad. Considerando dos depósitos que tienen el mismo volumen y el depósito 1 el doble de altura que el depósito 2, éste tendría una capacitancia doble que aquel, ya que se necesita el doble de líquido para que el nivel suba el mismo valor
- En un intercambiador de calor, si disminuye la temperatura de entrada, pasará cierto tiempo hasta que el agua fría pueda circular a través del tanque y alcance la sonda. El tiempo de retardo depende de la velocidad de transporte del fluido y de la distancia de transporte entre la entrada y la sonda. Durante el tiempo de retardo, la sonda no capta ningún cambio de temperatura.
- Tiempo que tarda el local en alcanzar los 2/3 de su evolución total hasta el estado final
- La constante de tiempo de una sonda es el producto de su resistencia térmica por su capacidad calorífica y corresponde al tiempo que tarda la sonda en alcanzar el 63% de su valor final, que se consigue en un tiempo igual a 5 veces la constante de tiempo
- En la práctica no existen servomotores de velocidad variable, sino que son motores paso a paso, es decir, se controlan los tiempos de funcionamiento y de parada que se van alternando. La velocidad aumenta cuanto mayores son los tiempos de funcionamiento y menores los de parada y al contrario.
- la integral de una constante es una recta de pendiente la constante. Si la constante se hace 0 la recta es horizontal
- En el regulador integral no existe un ofsset, sino que se consigue exactamente el valor de consigna

Enlaces externos
- Control automático Reguladores en lazo abierto y en lazo cerrado.
Bibliografía
- Antonio Creus. Instrumentación Industrial.marcombo. Boixareu Editores. isbn: 8426707653
| Control de autoridades |
|
|---|
 Datos: Q16624746
Datos: Q16624746