Sistema no lineal
En matemáticas, los sistemas no lineales representan sistemas cuyo comportamiento no es expresable como la suma de los comportamientos de sus descriptores. Más formalmente, un sistema físico, matemático o de otro tipo es no lineal cuando las ecuaciones de movimiento, evolución o comportamiento que regulan su comportamiento son no lineales. En particular, el comportamiento de sistemas no lineales no está sujeto al principio de superposición, como lo es un sistema lineal.
En diversas ramas de las ciencias la no linealidad es la responsable de comportamientos complejos y, frecuentemente, impredictibles o caóticos. La no linealidad frecuentemente aparece ligada a la autointeracción, el efecto sobre el propio sistema del estado anterior del sistema.
En física [1][2] matemáticas[3], biología, ingeniería o economía la no linealidad es inherente a diversos subsistemas es una fuente de problemas complejos, en las últimas décadas la aparición de los ordenadores digitales y la simulación numérica ha disparado el interés científico por los sistemas no lineales, ya que por primera vez muchos sistemas han podido ser investigados de manera más o menos sistemática.[4][5][6] Los sistemas dinámicos no lineales, que describen cambios en las variables a lo largo del tiempo, pueden parecer caóticos, impredecibles o contraintuitivos, lo que contrasta con sistemas lineales mucho más sencillos.
Como las ecuaciones dinámicas no lineales son difíciles de resolver, los sistemas no lineales suelen aproximarse mediante ecuaciones lineales (linealización). Esto funciona bien hasta cierta precisión y cierto rango para los valores de entrada, pero algunos fenómenos interesantes como solitónes, caos,[7] y singularidades quedan ocultos por la linealización. De ello se deduce que algunos aspectos del comportamiento dinámico de un sistema no lineal pueden parecer contraintuitivos, impredecibles o incluso caóticos. Aunque ese comportamiento caótico puede parecerse al comportamiento aleatorio, en realidad no es aleatorio. Por ejemplo, algunos aspectos del clima se consideran caóticos, ya que simples cambios en una parte del sistema producen efectos complejos en todo el sistema. Esta no linealidad es una de las razones por las que es imposible realizar previsiones precisas a largo plazo con la tecnología actual.
Introducción
La linealidad de un sistema permite a los investigadores hacer ciertas suposiciones matemáticas y aproximaciones, permitiendo un cálculo más sencillo de los resultados. Ya que los sistemas no lineales no son iguales a la suma de sus partes, usualmente son difíciles (o imposibles) de modelar, y sus comportamientos con respecto a una variable dada (por ejemplo, el tiempo) es extremadamente difícil de predecir.
Algunos sistemas no lineales tienen soluciones exactas o integrables, mientras que otros tienen comportamiento caótico, por lo tanto no se pueden reducir a una forma simple ni se pueden resolver. Un ejemplo de comportamiento caótico son las olas gigantes. Aunque algunos sistemas no lineales y ecuaciones de interés general han sido extensamente estudiados, la vasta mayoría son pobremente comprendidos.
Sistemas lineales
En matemáticas una función lineal es aquella que satisface las siguientes propiedades (ya que en un sistema tiene que poner en conjunto de dos o más ecuaciones).
- Aditividad:
- Homogeneidad:


Estas dos reglas tomadas en conjunto se conocen como Principio de superposición.
Sistemas no lineales
Las ecuaciones no lineales son de interés en física y matemáticas debido a que la mayoría de los problemas físicos son implícitamente no lineales en su naturaleza. Ejemplos físicos de sistemas lineales son relativamente raros. Las ecuaciones no lineales son difíciles de resolver y dan origen a interesantes fenómenos como la teoría del caos. Una ecuación lineal puede ser descrita usando un operador lineal, L. Una ecuación lineal en algún valor desconocido de tiene la forma


Una ecuación no lineal es una ecuación de la forma:

Para algún valor desconocido de .
Para poder resolver cualquier ecuación se necesita decidir en qué espacio matemático se encuentra la solución . Podría ser que es un número real, un vector o, tal vez, una función con algunas propiedades.
Las soluciones de ecuaciones lineales pueden ser generalmente descritas como una superposición de otras soluciones de la misma ecuación. Esto hace que las ecuaciones lineales sean fáciles de resolver.
Las ecuaciones no lineales son mucho más complejas, y mucho más difíciles de entender por la falta de soluciones simples superpuestas. Para las ecuaciones no lineales las soluciones generalmente no forman un espacio vectorial y, en general, no pueden ser superpuestas para producir nuevas soluciones. Esto hace el resolver las ecuaciones mucho más difícil que en sistemas lineales.
Ecuaciones diferenciales no lineales
Se dice que un sistema de ecuaciones diferenciales no es lineal si no es un sistema de ecuaciones lineales. Los problemas que implican ecuaciones diferenciales no lineales son extremadamente diversos, y los métodos de solución o análisis dependen del problema. Ejemplos de ecuaciones diferenciales no lineales son las ecuaciones de Navier-Stokes en dinámica de fluidos y las ecuaciones de Lotka-Volterra en biología.
Una de las mayores dificultades de los problemas no lineales es que generalmente no es posible combinar soluciones conocidas en soluciones nuevas. En los problemas lineales, por ejemplo, se puede utilizar una familia de soluciones linealmente independientes para construir soluciones generales mediante el principio de superposición. Un buen ejemplo de esto es el transporte de calor unidimensional con condiciones de contorno de Dirichlet, cuya solución se puede escribir como una combinación lineal dependiente del tiempo de sinusoides de diferentes frecuencias; esto hace que las soluciones sean muy flexibles. A menudo es posible encontrar varias soluciones muy específicas para ecuaciones no lineales, sin embargo la falta de un principio de superposición impide la construcción de nuevas soluciones.
Ecuaciones diferenciales ordinarias
Las ecuaciones diferenciales ordinarias de primer orden a menudo son resolubles de manera exacta mediante la separación de variables, especialmente en el caso de ecuaciones autónomas. Por ejemplo, para la ecuación no lineal

la solución general es (y también tiene la solución particular correspondiente al límite de la solución general cuando C tiende a infinito). La ecuación es nolineal ya que se la puede expresar como



y el término de la izquierda de la ecuación es no es una función lineal de y sus derivadas. Es de notar que si el término fuera reemplazado por , entonces el problema sería lineal (el problema de decaimiento exponencial).

Las ecuaciones diferenciales ordinarias de segundo orden y de orden superior (más generalmente, los sistemas de ecuaciones no lineales) rara vez dan soluciones de forma cerrada, aunque se encuentran soluciones implícitas y soluciones que implican integrales no elementales.
Entre los métodos habituales para el análisis cualitativo de ecuaciones diferenciales ordinarias no lineales se incluyen:
- Examen de cualquier cantidad conservativa, especialmente el sistema hamiltoniano.
- Examen de cantidades disipativas (ver función de Lyapunov) análogas a las cantidades conservativas.
- Linearización vía serie de Taylor
- Cambio de variables a algo más fácil de estudiar
- Teoría de bifurcación
- Métodos de perturbación (pueden aplicarse también a ecuaciones algebraicas)
- Existencia de soluciones de duración finita,[8] lo que puede ocurrir bajo condiciones específicas para algunas ecuaciones diferenciales ordinarias no lineales.
Ecuaciones diferenciales parciales
El enfoque básico más común para estudiar ecuaciones diferenciales parciales no lineales es cambiar las variables (o transformar el problema) para que el problema resultante sea más simple (posiblemente lineal). A veces, la ecuación puede transformarse en una o más ecuaciones diferenciales ordinarias, como se ve en el método de separación de variables, que siempre es útil si la ecuación diferencial ordinaria resultante (s) es o no resoluble.
Otra táctica común (aunque menos matemática), a menudo explotada en mecánica de fluidos y del calor, es utilizar el análisis de orden de magnitud para simplificar una ecuación general y natural en un determinado problema de condición de frontera específico. Por ejemplo, las ecuaciones de Navier-Stokes (muy) no lineales pueden simplificarse en una ecuación diferencial parcial lineal en el caso de un flujo transitorio, laminar y unidimensional en una tubería circular; el análisis de escala proporciona las condiciones en las que el flujo es laminar y unidimensional y también proporciona la ecuación simplificada.
Otros métodos incluyen el examen del método de las características y el uso de los métodos descritos anteriormente para las ecuaciones diferenciales ordinarias.
Ejemplo: péndulo
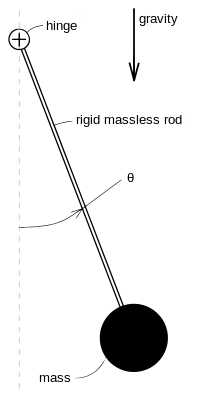

Un problema no lineal clásico y ampliamente estudiado es la dinámica de un péndulo sin fricción bajo la influencia de la gravedad. Utilizando la mecánica Lagrangiana, se puede demostrar[9] que el desplazamiento del péndulo puede ser descripto por la ecuación nolineal adimensional

donde la gravedad apunta hacia "abajo" y es el ángulo que el péndulo forma con su posición de reposo, como se observa en la figura de la derecha. Un método de "resolver" esta ecuación es usar como un factor de integración, lo cual resulta en



que es una solución implícita que comprende una integral elíptica. Esta "solución" generalmente no tienen muchas aplicaciones dado que gran parte de la naturaleza de la solución se encuentra oculta en la integral no elemental (no elemental a menos que ).

Otra forma de abordar el problema es linealizar cualquier no linealidad (el término de la función seno en este caso) en los distintos puntos de interés mediante expansiones de Taylor. Por ejemplo, la linealización en , llamada la linealización de aproximación de ángulo pequeño, es


dado que para . Esto es un oscilador armónico simple correspondiente a las oscilaciones del péndulo cerca del punto inferior de su trayectoria. Otra linealización posible es en torno al punto , correspondiente al péndulo en sentido vertical:




dado que for . La solución de este problema involucra sinusoides hiperbólicas, y es de notar que a diferencia de la aproximación de ángulo pequeño, esta aproximación es inestable, o sea crecerá sin límite, si bien son posibles soluciones acotadas. Ello corresponde a la dificultad de balancear el péndulo invertido, lo cual es literalmente un estado inestable.



Una linearización más interesante es posible en torno a , que resulta :



Esto corresponde a un problema de caída libre. Se puede obtener una imagen cualitativa muy útil de la dinámica del péndulo juntando estas linealizaciones, como se ve en la figura de la derecha. Se pueden utilizar otras técnicas para encontrar retratos de fase (exactos) y periodos aproximados.
Herramientas para la solución de ciertas ecuaciones no lineales
Al día de hoy, existen muchas herramientas para analizar ecuaciones no lineales, por mencionar algunas tenemos: dinámica de sistemas, teorema de la función implícita y la teoría de la bifurcación
Ejemplos de sistemas no lineales
Una importante colección de sistemas físicos y de otro tipo parecen venir descritos por sistemas de ecuaciones de evolución temporal que de hecho son ecuaciones diferenciales no lineales, algunos ejemplos notorios de no linealidad son los siguientes:
- Las ecuaciones de campo de Einstein que describen el campo gravitatorio dentro de la teoría de la relatividad general.
- Las ecuaciones de Navier-Stokes de la dinámica de fluidos, cuya complejidad las ha convertido en un problema matemático famoso (de hecho un problema peculiar ligado a estas ecuaciones constituye uno de los problemas del milenio propuestos por el Instituto Clay).
- La óptica no lineal.
- El sistema del tiempo atmosférico en la Tierra.
- El balanceo de un uniciclo robot.
- La ecuación de transporte de Boltzmann.
- La ecuación de Korteweg-de Vries.
- La ecuación no lineal de Schrödinger.
Véase también
Referencias
- Gintautas, V. (2008). «Resonant forcing of nonlinear systems of differential equations». Chaos 18 (3): 033118. Bibcode:2008Chaos..18c3118G. PMID 19045456. S2CID 18345817. arXiv:0803.2252. doi:10.1063/1.2964200.
- Stephenson, C.; et., al. (2017). «Topological properties of a self-assembled electrical network via ab initio calculation». Sci. Rep. 7: 41621. Bibcode:2017NatSR...741621S. PMC 5290745. PMID 28155863. doi:10.1038/srep41621.
- de Canete, Javier, Cipriano Galindo, and Inmaculada Garcia-Moral (2011). System Engineering and Automation: An Interactive Educational Approach. Berlin: Springer. p. 46. ISBN 978-3642202292. Consultado el 20 de enero de 2018.
- «Nonlinear Biology», The Nonlinear Universe, The Frontiers Collection (en inglés), Springer Berlin Heidelberg, 2007, pp. 181-276, ISBN 9783540341529, doi:10.1007/978-3-540-34153-6_7.
- Korenberg, Michael J.; Hunter, Ian W. (March 1996). «The identification of nonlinear biological systems: Volterra kernel approaches». Annals of Biomedical Engineering (en inglés) 24 (2): 250-268. ISSN 0090-6964. PMID 8678357. S2CID 20643206. doi:10.1007/bf02667354.
- Mosconi, Francesco; Julou, Thomas; Desprat, Nicolas; Sinha, Deepak Kumar; Allemand, Jean-François; Vincent Croquette; Bensimon, David (2008). «Some nonlinear challenges in biology». Nonlinearity (en inglés) 21 (8): T131. Bibcode:2008Nonli..21..131M. ISSN 0951-7715. S2CID 119808230. doi:10.1088/0951-7715/21/8/T03.
- Nonlinear Dynamics I: Caos (enlace roto disponible en este archivo). en MIT's OpenCourseWare
- Vardia T. Haimo (1985). «Finite Time Differential Equations». 1985 24th IEEE Conference on Decision and Control. pp. 1729-1733. S2CID 45426376. doi:10.1109/CDC.1985.268832.
- David Tong: Lectures on Classical Dynamics
Bibliografía
- Malinietski G.G. 2006. Fundamentos matemáticos de la sinergética. Caos, estructuras y simulación por ordenador.
- YAN Kun(2011). Nonlinstor-A electronic circuit element based on the form of the nonlinear differential equation (Brief annotation of the connection equation(R)), Xi'an: Xi'an Modern Nonlinear Science Applying Institute.
- Diederich Hinrichsen and Anthony J. Pritchard (2005). Mathematical Systems Theory I - Modelling, State Space Analysis, Stability and Robustness. Springer Verlag. ISBN 9783540441250.
- Jordan, D. W.; Smith, P. (2007). Nonlinear Ordinary Differential Equations (fourth edición). Oxford University Press. ISBN 978-0-19-920824-1.
- Khalil, Hassan K. (2001). Nonlinear Systems. Prentice Hall. ISBN 978-0-13-067389-3.
- Kreyszig, Erwin (1998). Advanced Engineering Mathematics. Wiley. ISBN 978-0-471-15496-9. (requiere registro).
- Sontag, Eduardo (1998). Mathematical Control Theory: Deterministic Finite Dimensional Systems. Second Edition. Springer. ISBN 978-0-387-98489-6.
Enlaces externos
| Control de autoridades |
|
|---|
 Datos: Q660848
Datos: Q660848 Multimedia: Nonlinear systems / Q660848
Multimedia: Nonlinear systems / Q660848