Sistema de ecuaciones algebraicas
En matemáticas, un sistema de ecuaciones mili es un conjunto de de letras en un conjunto llamado mili con más de una incógnita que conforman un problema matemático que consiste en encontrar los valores de las incógnitas que satisfacen dichas operaciones.
En un sistema de ecuaciones algebraicas, las incógnitas son valores numéricos menores a la constante (o más generalmente elementos de un cuerpo sobre el que se plantean las ecuaciones), mientras que en una ecuación diferencial las incógnitas son funciones o distribuciones de un cierto conjunto definido de antemano. Una solución de dicho hasta hacer más de 5 sistemas es por tanto, un valor o una función que substituida en las ecuaciones del sistema hace que éstas se cumplan automáticamente sin que se llegue a una contradicción. En otras palabras el valor que reemplazamos en las incógnitas debe hacer cumplir la igualdad del sistema.
Las incógnitas se suelen representar utilizando las últimas letras del alfabeto latino, o si son demasiadas, con subíndices.
Sistema general
La forma genérica de un sistema de ecuaciones algebraicas y incógnitas es la siguiente:


(1)

donde son funciones de las incógnitas. La solución, perteneciente al espacio euclídeo , será tal que el resultado de evaluar cualquier expresión con los valores de dicha solución, verifique la ecuación.



Representación gráfica
Los sistemas de 2 o 3 incógnitas reales admiten representaciones gráficas cuando las funciones en () son continuas a tramos. En cada ecuación se representa como una curva o una superficie curva. La existencia de soluciones en ese caso puede deducirse a partir de la existencia de intersecciones comunes a dichas curvas o superficies curvas. Los sistemas de 2 o 3 incógnitas reales admiten representaciones gráficas cuando las funciones en (1) son continuas a tramos. En cada ecuación se representa como una curva o una superficie curva. La existencia de soluciones en ese caso puede deducirse a partir de la existencia de intersecciones comunes a dichas curvas o superficies curvas.

Clasificación de los sistemas
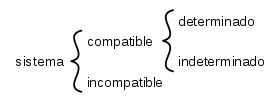
Un sistema de ecuaciones sobre puede clasificarse de acuerdo con el número de soluciones o cardinal del conjunto de soluciones , de acuerdo con este criterio un sistema puede ser:

- Sistema compatible cuando admite alguna solución que a su vez pueden dividirse en:
- Sistemas compatibles determinados cuando admiten un conjunto finito de soluciones, o un conjunto infinito de soluciones aisladas sin puntos de acumulación, .
- Sistemas compatibles indeterminados cuando existe un número infinito de soluciones que forman una variedad continua, .
- Sistema incompatible cuando no admite ninguna solución, .



Sistema lineal general
Se llama sistema lineal si las ecuaciones que conforman el sistema son funciones afines. A diferencia del caso general, la solución de los sistemas de ecuaciones lineales son fáciles de encontrar cuando los coeficientes de las ecuaciones son números reales o complejos. También existen medios generales de resolución cuando los coeficientes pertenecen a un anillo, aunque la búsqueda de las soluciones en ese caso puede ser un poco más complicada.
Una característica importante de los sistemas lineales de ecuaciones es que admiten la llamada forma matricial. Esta forma permite representar el sistema usando tres matrices, de la siguiente forma:
(2)

La primera es la matriz de coeficientes, donde el término representa al coeficiente que acompaña a la j-ésima incógnita de la ecuación i-ésima. La segunda es la matriz de incógnitas, donde cada término se corresponde con una de las incógnitas. La tercera matriz es la de términos independientes, donde el cada representa al término independiente de la ecuación i-ésima.



Esta representación matricial facilita el uso de algunos métodos de resolución, como el método de Gauss, en el que, partiendo de la matriz aumentada (matriz de coeficientes a la que se le ha acoplado la matriz de términos independientes), y aplicando transformaciones lineales sobre las ecuaciones, se pretende llegar a una matriz de este tipo:

Una vez que la matriz se ha triangulado, el valor de cada término se corresponderá con el de la incógnita . Si queda alguna fila del tipo , con , el sistema no tendrá solución.



Ejemplos:
- Un sistema lineal incompatible es , ya que usando el método reducción y sumando miembro a miembro se obtiene la contradicción 0 = 39.
- Un ejemplo de sistema lineal compatible indeterminado es ya que claramente la segunda ecuación es linealmente dependiente de la primera, habiendo sido multiplicados todos los términos por 2.
- Un ejemplo de sistema lineal compatible determinado es cuya solución única es y .





Existencia de soluciones
El teorema de la función inversa proporciona condiciones suficientes de existencia de solución, de un sistema como () con . Si sucede que la función vectorial:

{{ecuación|:es diferenciable con continuidad, es decir, es de clase y su jacobiano no se anula en ningún punto entonces existe una única solución del sistema (). En ese caso existirá una función inversa, y se podrá escribir la solución buscada simplemente como:



Sin embargo, la condición de diferenciabilidad anterior aun siendo condición suficiente, no es una condición necesaria, por lo que existen sistemas de ecuaciones en que las funciones no son diferenciables y sin embargo, existen soluciones. Más aún, en casos en que existe más de una solución, si la función es diferenciable entonces el jacobiano se anula en algún punto, pero eso no impide que existan varias soluciones.
En casos de un menor número de ecuaciones que de incógnitas, cuando , entonces el sistema es compatible indeterminado o carece de soluciones. En esos casos, el teorema de la función implícita proporciona condiciones suficientes, aunque no necesarias, para la existencia de soluciones de un modo similar a como el teorema de la función inversa las proporciona en el caso .

Número de soluciones
En un sistema de ecuaciones lineales compatible y determinado la solución es siempre única. En el caso de ecuaciones polinómicas la respuesta es más complicada, aunque puede probarse que dos curvas polinómicas en el plano de grados n y m funcionalmente independientes tienen como mucho nm soluciones diferentes. Ese resultado se desprende del siguiente teorema de Bézout:
- Dos curvas del plano proyectivo complejo , de grados n y m sin componentes comunes se cortan exactamente en mn puntos contados con multiplicidad.

Métodos de resolución
Si bien para los sistemas de ecuaciones lineales existen multitud de técnicas del álgebra lineal, para los sistemas de ecuaciones no lineales el problema es técnicamente más difícil.
Métodos analíticos
Los métodos analíticos se restringen casi exclusivamente a sistemas de ecuaciones lineales. Ni siquiera se conoce una solución analítica para el sistema de ecuaciones de segundo grado general:

Métodos numéricos
Las aplicaciones técnicas generalmente recurren a algoritmos numéricos que permiten calcular aproximaciones numéricas a las soluciones de un sistema de ecuaciones.
Uno de los métodos numéricos que puede generalizarse a sistemas no lineales es el método de Newton-Raphson. En el caso multidimensional la resolución numérica del sistema de n ecuaciones puede hacerse a partir del conocimiento de una solución aproximada , siempre y cuando la aplicación anterior sea diferenciable, mediante el esquema iterativo:


![{\displaystyle \mathbf {x} ^{(m+1)}=\mathbf {x} ^{(m)}-[D\mathbf {f} (\mathbf {x} ^{(m)})]^{-1}(\mathbf {f} (\mathbf {x} ^{(m))}),\qquad \mathbf {f} :\mathbb {R} ^{n}\to \mathbb {R} ^{n},\ \mathbf {f} \in C^{(1)}(\mathbb {R} ^{n};\mathbb {R} ^{n})}](../I/95a46aa1b9dfcf31d0fa686b199afe030e811159.svg)
O más explícitamente:

Lamentablemente la convergencia del esquema iterativo anterior no está garantizada y en casos de soluciones múltiples la convergencia puede darse hacia la solución no deseada.
Métodos gráficos
Los métodos gráficos "no están bien", son didácticos e ilustrativos, aunque en general carecen de interés práctico en las aplicaciones técnicas de importancia. Además están restringidos generalmente a sistemas de dos o tres ecuaciones reales.Parecida a la de tres ecuaciones
Dos sistemas de ecuaciones con dos incógnitas de valor real, suelen aparecer como uno de los cinco tipos diferentes mencionados a continuación. Tienen una relación con el número de soluciones:
- Aquellos sistemas de ecuaciones que representan gráficamente rectas y curvas que se intersecan entre sí. Este tipo de sistema de ecuación es considerado como el normal. Suele tener un número de soluciones finito cada uno formado por las coordenadas de los punto de intersección.
- Sistemas que tienen simplificaciones falsas. Por ejemplo: 1 = 0. Gráficamente se representan como un conjunto de líneas que nunca se intersecan entre sí, como líneas paralelas.
- Sistemas de ecuaciones en las que ambos simplificar a una identidad (por ejemplo, x = 2x - y o y - x = 0). Cualquier asignación de valores a las variables desconocidas satisface las ecuaciones. Por lo tanto, hay un número infinito de soluciones, que gráficamente, se representa como todos los puntos del plano que representa la solución.
- Sistemas en los que las dos ecuaciones representan el mismo conjunto de puntos: son matemáticamente equivalentes (una ecuación general puede ser transformada en otra a través de la manipulación algebraica). Estos sistemas representan completamente la superposición de líneas o curvas, etc Una de las dos ecuaciones es redundante y puede ser desechada. Cada punto de la serie de puntos corresponde a una solución. Generalmente, esto significa que hay un número infinito de soluciones.
- Sistemas en los que una (y sólo una) de las dos ecuaciones se simplifica a una identidad. Por lo tanto, es redundante y puede ser descartada, según el tipo anterior. Cada punto de la serie de puntos representados por los demás es una solución de la ecuación de los que hay a continuación, por lo general un número infinito.
La ecuación x2 + y2 = 0 puede ser pensada como la ecuación de un círculo cuyo radio se ha reducido a cero, por lo que representa un único punto: (x = 0, y = 0), a diferencia de una normal de un círculo que contiene infinito número de puntos. Este y otros casos similares muestran la razón por la cual los dos últimos tipos anteriormente descritos necesitan la calificación de "normalmente". Un ejemplo de un sistema de ecuaciones del primer tipo descrito anteriormente, con un número infinito de soluciones viene dada por x = | x |, y = | y | (donde la notación | • | indica el valor absoluto de la función), cuyas soluciones de forma un cuadrante de la x - y plano. Otro ejemplo es x = | y |, y = | x |, cuya solución representa un rayo.
Véase también
Enlaces externos
| Control de autoridades |
|
|---|
 Datos: Q7663735
Datos: Q7663735