Torsión mecánica
En ingeniería, torsión es la solicitación que se presenta cuando se aplica un momento sobre el eje longitudinal de un elemento constructivo o prisma mecánico, como pueden ser ejes o, en general, elementos donde una dimensión predomina sobre las otras dos, aunque es posible encontrarla en situaciones diversas.

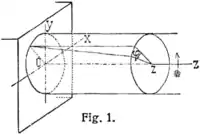
La torsión se caracteriza geométricamente porque cualquier curva paralela al eje de la pieza deja de estar contenida en el plano formado inicialmente por las dos curvas. En lugar de eso una curva paralela al eje se retuerce alrededor de él (ver torsión geométrica).
El estudio general de la torsión es complicado porque bajo ese tipo de solicitación la sección transversal de una pieza en general se caracteriza por dos fenómenos:
- Aparecen tensiones tangenciales paralelas a la sección transversal. Si estas se representan por un campo vectorial sus líneas de flujo "circulan" alrededor de la sección.
- Cuando las tensiones anteriores no están distribuidas adecuadamente, cosa que sucede siempre a menos que la sección tenga simetría circular, aparecen alabeos seccionales que hacen que las secciones transversales deformadas no sean planas.
El alabeo de la sección complica el cálculo de tensiones y deformaciones, y hace que el momento torsor pueda descomponerse en una parte asociada a torsión alabeada y una parte asociada a la llamada torsión de Saint-Venant. En función de la forma de la sección y la forma del alabeo, pueden usarse diversas aproximaciones más simples que el caso general.
¿Cuáles son los materiales de Torsión?
Torsión general: Dominios de torsión
En el caso general se puede demostrar que el giro relativo de una sección no es constante y no coincide tampoco con la función de alabeo unitario. A partir del caso general, y definiendo la esbeltez torsional como:

Donde G, E son respectivamente el módulo de elasticidad transversal y el módulo elasticidad longitudinal, J, Iω son el módulo torsional y el momento de alabeo y L es la longitud de la barra recta. Podemos clasificar los diversos casos de torsión general dentro de límites donde resulten adecuadas las teorías aproximadas expuestas a continuación. De acuerdo con Kollbruner y Basler:[1]
- Torsión de Saint-Venant pura, cuando .
- Torsión de Saint-Venant dominante, cuando .
- Torsión alabeada mixta, cuando .
- Torsión alabeada dominante, cuando .
- Torsión alabeada pura, cuando .



![{\displaystyle \lambda _{T}\in (1/2,2]}](../I/13c360bc0c097060f66c8d1bf3146771de4423ae.svg)
![{\displaystyle \lambda _{T}\in (0,1/2]}](../I/aec9cc5e60731c4e95e1dc9e7ae35f8e5ea7607f.svg)
El cálculo exacto de la torsión en el caso general puede llevarse a cabo mediante métodos variacionales o usando un lagrangiano basado en la energía de deformación. El caso de la torsión alabeada mixta sólo puede ser tratado la teoría general de torsión. En cambio la torsión de Saint-Venant y la torsión alabeada puras admiten algunas simplificaciones útiles.
Torsión de Saint-Venant pura
La teoría de la torsión de Saint-Venant es aplicable a piezas prismáticas de gran inercia torsional con cualquier forma de sección, en esta simplificación se asume que el llamado momento de alabeo es nulo, lo cual no significa que el alabeo seccional también lo sea. La teoría de torsión de Saint-Venant da buenas aproximaciones para valores , esto suele cumplirse en:

- Secciones macizas de gran inercia torsional (circulares o de otra forma).
- Secciones tubulares cerradas de pared delgada.
- Secciones multicelulares de pared delgada.
Para secciones no circulares y sin simetría de revolución la teoría de Sant-Venant además de un giro relativo de la sección transversal respecto al eje baricéntrico predice un alabeo seccional o curvatura de la sección transversal. La teoría de Coulomb de hecho es un caso particular en el que el alabeo es cero, y por tanto sólo existe giro.
Torsión recta: Teoría de Coulomb

La teoría de Coulomb es aplicable a ejes de transmisión de potencia macizos o huecos, debido a la simetría circular de la sección no pueden existir alabeos diferenciales sobre la sección. De acuerdo con la teoría de Coulomb la torsión genera una tensión cortante el cual se calcula mediante la fórmula:

Donde:
- : Esfuerzo cortante a la distancia .
- : Momento torsor total que actúa sobre la sección.
- : distancia desde el centro geométrico de la sección hasta el punto donde se está calculando la tensión cortante.
- : Módulo de torsión.





Esta ecuación se asienta en la hipótesis cinemática de Coulomb sobre como se deforma una pieza prismática con simetría de revolución, es decir, es una teoría aplicable solamente a elementos sección circular o circular hueca. Para piezas con sección de ese tipo se supone que el eje baricéntrico permanece inalterado y cualquier otra línea paralea al eje se transforma en una espiral que gira alrededor del eje baricéntrico, es decir, se admite que la deformación viene dada por unos desplazamientos del tipo:

El tensor de deformaciones para una pieza torsionada como la anterior se obtiene derivando adecuadamente las anteriores componentes del vector de desplazamiento:



A partir de estas componentes del tensor de deformaciones usando las ecuaciones de Lamé-Hooke llevan a que el tensor tensión viene dado por:

Usando las ecuaciones de equivalencia se llega a la relación existente entre la función α y el momento torsor:

Donde , es el momento de inercia polar que es la suma de los segundos momentos de área.

Torsión no recta: Teoría de Saint-Venant
Para una barra recta de sección no circular además del giro relativo aparecerá un pequeño alabeo que requiere una hipótesis cinemática más complicada. Para representar la deformación se puede tomar un sistema de ejes en el que X coincida con el eje de la viga y entonces el vector de desplazamientos de un punto de coordenadas (x, y, z) viene dado en la hipótesis cinemática de Saint-Venant por:

Donde es el giro relativo de la sección (siendo su derivada constante); siendo zC y yC las coordenadas del centro de cortante respecto al centro de gravedad de la sección transversal y siendo ω(y, z) la función de alabeo unitario que da los desplazamientos perpendiculares a la sección y permiten conocer la forma curvada final que tendrá la sección transversal. Conviene señalar, que la teoría al postular que la derivada del giro es constante es sólo una aproximación útil para piezas de gran inercia torsional. Calculando las componentes del tensor de deformaciones a partir de las derivadas del desplazamiento se tiene que:

![{\displaystyle {\begin{matrix}\varepsilon _{xx}={\cfrac {\partial u_{x}}{\partial x}}=\omega {\cfrac {{\text{d}}\theta _{x}}{{\text{d}}x}}&&\varepsilon _{xy}={\cfrac {1}{2}}\left[{\cfrac {\partial u_{x}}{\partial y}}+{\cfrac {\partial u_{y}}{\partial x}}\right]={\cfrac {1}{2}}\left[{\cfrac {\partial \omega }{\partial y}}-(z-z_{C})\right]{\cfrac {{\text{d}}\theta _{x}}{{\text{d}}x}}\\\varepsilon _{yy}={\cfrac {\partial u_{y}}{\partial y}}=0&&\varepsilon _{xz}={\cfrac {1}{2}}\left[{\cfrac {\partial u_{x}}{\partial z}}+{\cfrac {\partial u_{z}}{\partial x}}\right]={\cfrac {1}{2}}\left[{\cfrac {\partial \omega }{\partial y}}+(y-y_{C})\right]{\cfrac {{\text{d}}\theta _{x}}{{\text{d}}x}}\\\varepsilon _{zz}={\cfrac {\partial u_{z}}{\partial z}}=0&&\varepsilon _{yz}={\cfrac {1}{2}}\left[{\cfrac {\partial u_{y}}{\partial z}}+{\cfrac {\partial u_{z}}{\partial y}}\right]=0\end{matrix}}}](../I/621ba62b0f96550ce23e2fd7cee1b40e9ec519a3.svg)
Calculando las tensiones a partir de las anteriores deformaciones e introduciéndolas en la ecuación de equilibrio elástico se llega a:

Analogía de la membrana de Prandtl
Para secciones macizas de gran rigidez torsional la distribución de las tensiones asociadas a la torsión guarda una analogía mecánica con la deformación de una membrana elástica cuasiplana. Concretamente Prandtl probó en 1903 que la forma que adopta la membrana puede relacionarse con una función de tensiones cuyas derivadas dan las tensiones tangenciales en cada dirección.[2] Dicho de otra manera la pendiente de una membrana de Prandtl deformada coinciden con las tensiones tangenciales de torsión de un prisma mecánico cuya sección transversal tenga precisamente la misma forma que la membrana.
En ese caso para una sección simplemente conexa (es decir, maciza), el problema de la torsión puede plantearse en términos de la función de tensiones de Prandtl que viene definida por:


Y en términos de estas las tensiones vienen dadas por:

Secciones cerradas simples de pared delgada
En este caso las tensiones tangenciales pueden considerarse aproximadamente constantes sobre una línea paralela al espesor de la pieza, es decir, perpendicular al contorno exterior de la pieza. La tensión tangencial en este caso puede expresarse mediante:

Donde:
- , es el área encerrada por la línea media de la sección tubular.
- , es el espesor de la sección tubular en el punto s de la curva del contorno.


Mientras que el giro:

En caso de que el espesor sea e(s) = e0constante esta última ecuación se reduce a:

Torsión alabeada pura
Para piezas de muy escasa inercia torsional, como las piezas de pared delgada abierta, puede construirse un conjunto de ecuaciones muy simples en la que casi toda la resistencia a la torsión se debe a las tensiones cortantes inducidas por el alabeo de la sección. En la teoría de torsión alabeada pura se usa la aproximación de que el momento de alabeo coincide con el momento torsor total. Esta teoría se aplica especialmente a piezas de pared delgada abierta, donde no aparecen esfuerzos de membrana.
Secciones abiertas de pared delgada
Para un rectángulo muy alargado (b << a) la tensión tangencial máxima y el giro pueden aproximarse por:

Para una perfil I o perfil H que puede ser aproximado uniendo rectángulos de dimensiones (dos alas rectangualres alargadas y un alma rectangular alargada) las expresiones anteriores se pueden generalizar a:


Donde τi,max es la tensión tangencial máxima sobre el rectángulo i-ésimo, bi es el espesor (ancho) de dicho rectángulo y ai su largo.
Torsión mixta
En el dominio de torsión de Saint-Venant dominante y de torsión alabeada dominante, pueden emplearse con cierto grado de aproximación la teoría de Sant-Venant y la teoría de torsión alabeada. Sin embargo en el dominio central de torsión extrema, se cometen errores importantes y es necesario usar la teoría general más complicada.
![{\displaystyle \mathbf {T} _{tor}={\begin{bmatrix}\sigma _{xx}&\tau _{xy}&\tau _{xz}\\\tau _{xy}&0&0\\\tau _{xz}&0&0\end{bmatrix}}\qquad {\begin{cases}\sigma _{xx}=\omega {\cfrac {B_{\omega }}{I_{\omega }}}\\\tau _{xy}=-{\cfrac {1-\kappa _{0}}{\kappa _{0}}}\left[{\cfrac {\partial \omega }{\partial y}}+z_{C}\right]{\cfrac {M_{\omega }}{J}}+\left[{\cfrac {\partial \omega }{\partial y}}-(z-z_{C})\right]{\cfrac {M_{x}-M_{\omega }}{J}}\\\tau _{xz}=-{\cfrac {1-\kappa _{0}}{\kappa _{0}}}\left[{\cfrac {\partial \omega }{\partial y}}-y_{C}\right]{\cfrac {M_{\omega }}{J}}+\left[{\cfrac {\partial \omega }{\partial y}}+(y-y_{C})\right]{\cfrac {M_{x}-M_{\omega }}{J}}\end{cases}}}](../I/50e5283be684685f0d8d1439bf935393295f0057.svg)
Donde las magnitudes geométricas son respectivamente el segundo momento de alabeo y el módulo de torsión y los "esfuerzos" se denominan bimomento y momento de alabeo, todos ellos definidos para prismas mecánicos.


Tensiones tangenciales máximas
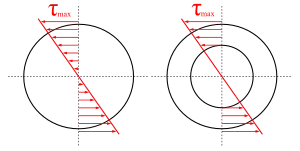
Para una pieza de sección circular de radio R sometida a un momento torsor MT la tensión tangencial máxima viene dada por:

Para un triángulo equilátero y un cuadrado las tensiones máximas debidas a la torisón se dan sobre la mitad de uno de sus lados y vienen dadas por:

donde L es lado del triángulo o el cuadrado. Para una sección general simplemente conexa de gran rigidez torisonal sometida a torsión de Saint-Venant, y por tanto para cual sea válida la analogía de la membrana de Prandtl puede probarse que la tensión tangencial máxima debida a la torsión viene acotada de la manera siguiente:[3]

donde:
- , es la mínima curvatura del contorno (positiva si el centro de curvatura cae dentro de la sección, negativa si cae fuera).
- es un número relacionado con el radio del máximo círculo que se puede inscribir en la sección. Si además la curvatura es positiva en todo el contorno , entonces





Véase también
Referencias
- Kollbruner, C.F. & Basler, K., Torsión in structures, an engineering approach, Springer, 1969.
- Prandtl, L.: "Zur torsion von prismatischen stäben", Phys. Z., 4, pp. 758-770 (1903).
- Wheeler, 1996, p. 163
Bibliografía
- Ortiz Berrocal, L., Elasticidad, McGraw-Hill, 1998, ISBN 84-481-2046-9.
- Timoshenko, S.P. y Godier J.N., Theory of elasticity, McGraw-Hill, 1951.
- Monleón Cremades, S., Análisis de vigas, arcos, placas y láminas, Ed. UPV, 1999, ISBN 84-7721-769-6.
- Wheeler, L. T. (1996). «Maximum Principles in Classical Elasticity». En Russo, R., ed. Mathematical Problems in Elasticity. Series on Advances in Mathematics for Applied Sciences (Singapore: World Scientific Publishing Co. Pte. Ltd.) 38: 157-185. ISBN 9810225768.