Axe instantané de rotation
L'axe instantané de rotation est un terme utilisé en mécanique classique et plus particulièrement en cinématique pour désigner l'axe autour duquel tourne un solide à un instant donné par rapport à un référentiel.
Pour les articles homonymes, voir CIR.
Si l'on peut utiliser la simplification des problèmes plans, on parle de centre instantané de rotation (CIR).
Problème plan : le centre instantané de rotation
Définition
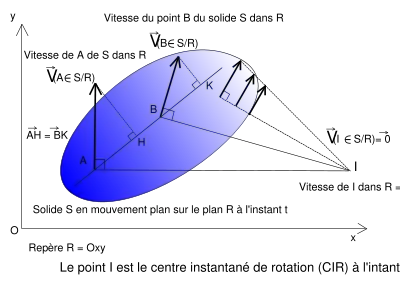
Lorsque le mouvement d'un solide isolé au sens mécanique du terme est tel que les vitesses de chacun de ses points restent parallèles à un plan donné, on peut étudier ce mouvement en se limitant à ce plan. On parle alors de mouvement plan, ou encore de mouvement plan sur plan, l'un des plans désignant le solide et l'autre plan le plan de référence. Si on note Oxy ce plan de référence, il est cependant commode de conserver un axe Oz perpendiculaire au plan pour continuer à pouvoir utiliser le produit vectoriel. Le centre instantané de rotation (sigle usuel CIR) se définit comme le point où le vecteur vitesse est nul.
Dans le plan de référence, le centre instantané de rotation se situe sur la perpendiculaire à chaque vecteur vitesse du solide isolé passant par le point d'application de ce dernier.
Lorsque le solide isolé se déplace uniquement en translation dans un plan, le centre instantané de rotation est projeté à l'infini.
Le torseur cinématique réduit au centre instantané de rotation est :

Exemple des danseuses de cancan
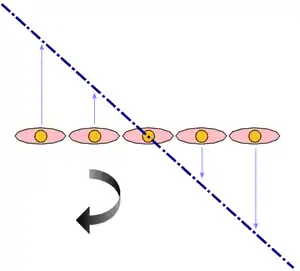
L'illustration représente des danseuses de cancan vues de dessus. Considérons un mouvement d'ensemble des cinq danseuses en ligne, c'est-à-dire qu'elles restent en position fixe les unes relativement aux autres ; l'ensemble de ces cinq danseuses peut alors être vu comme parties d'un solide au sens mécanique du terme. Imaginons maintenant une chorégraphie où elles tournent autour de la danseuse centrale (tout en restant en ligne avec une interdistance fixe…) : on peut dire que le centre instantané de rotation est à la position de la danseuse centrale, puisqu'elle n'a pas de vitesse relative à la salle (elle se contente de tourner sur elle-même), contrairement à ses compagnes qui ont une vitesse proportionnelle à leur éloignement du centre.
Justification
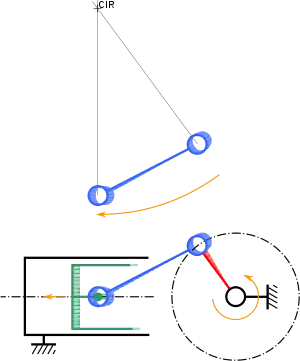
Considérons une pièce ayant un mouvement plan quelconque, par exemple le mouvement d'une bielle. Si l'on prend une photographie, on a un flou en raison du mouvement : les points « filent », et les segments de droite générés par les points sont une image des vecteurs vitesse.
Si la bielle était en rotation autour de son centre instantané de rotation, on obtiendrait une photo semblable, avec le même flou. Sur un très court instant — le temps de pose de la photographie —, les deux mouvements sont équivalents.
De manière plus rigoureuse : le torseur cinématique d'un solide en mouvement plan dans le plan (Oxy) réduit à un point quelconque A s'écrit :

c'est un glisseur puisque et sont orthogonaux. Il existe donc un point B tel que . D'après la propriété d'équiprojectivité, on a



- .

Si l'on note (X, Y, 0) les composantes de , on a alors


si ωz n'est pas nul, alors le point B existe et est unique, et il ne dépend pas du point A ; il est appelé centre instantané de rotation.
Utilisation du centre instantané de rotation dans un problème de cinématique plane
Considérons un mouvement plan qui n'est pas un mouvement de translation. Durant un court instant, tout se passe comme si le solide était en mouvement de rotation autour de son centre instantané de rotation. On peut alors appliquer les relations établies dans le cas des mouvements de rotation, et en particulier la notion de triangle des vitesses. Cela permet de déterminer le vecteur vitesse en un point quelconque du solide, à condition de connaître :
- le vecteur vitesse en un point ;
- la position du centre instantané de rotation.
La méthode est une alternative à la méthode de l'équiprojectivité.
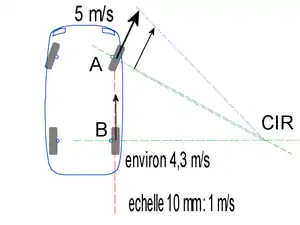
Prenons l'exemple d'une voiture en virage, dont on connaît la direction, le sens, le point d'application et l'intensité (5 m/s) du vecteur vitesse de la roue avant. On connaît également la direction, le point d'application et le sens de la roue arrière. Les points A et B sont les centres des roues et respectivement les points d'application de leur vecteur vitesse.
L'objectif est de déterminer l'intensité du vecteur vitesse de la roue arrière.
Résolution graphique grâce au centre instantané de rotation :
- On choisit une échelle des vitesses, par exemple 10 mm pour 1 m/s ;
- On place le vecteur vitesse de la roue avant au point A ;
- On trace (en rouge) la direction du vecteur vitesse de la roue arrière au point B ;
- Le centre instantané de rotation se situe sur une droite passant par le point d'application des vecteurs vitesse et perpendiculaire à ces derniers : on trace donc les traits verts, et on déduit le centre instantané de rotation ;
- On mesure le segment [CIR B] et on reporte la mesure sur le segment [CIR A] trait bleu ;
- On trace une droite passant par le centre instantané de rotation et par l'extrémité du vecteur vitesse associé au point A ;
- On trace un segment perpendiculaire à [CIR A] passant par la mesure reportée sur [CIR A] et coupant le segment passant par CIR et par l'extrémité de ;
- On mesure ce dernier segment et en fonction de l'échelle on trouve l'intensité du vecteur vitesse .


Base et roulante
Au cours du temps, le centre instantané de rotation se déplace. Dans le plan de référence, il décrit une courbe appelée base. Dans le plan lié au solide en mouvement, il décrit une courbe appelée roulante. Au cours du mouvement, la roulante roule sans glisser sur la base.
Problème spatial : axe instantané de rotation
Dans le cas d'un solide indéformable, le champ de vitesse des points du solide est équiprojectif, c'est donc un torseur : le torseur cinématique. Si le solide n'est pas en translation par rapport au référentiel, alors la résultante n'est pas nulle. On peut donc trouver un axe central (Δ), c'est-à-dire une droite sur laquelle le moment est parallèle à cet axe. Cet axe est parallèle à .

Cet axe est l'axe instantané de rotation.
Cette notion devient intéressante lorsque le vecteur vitesse sur cet axe est nul, c'est-à-dire dans le cas d'une rotation autour d'un axe fixe dans le référentiel, ou bien lorsque le centre d'inertie se trouve sur (Δ). Alors la relation entre le moment cinétique et le moment dynamique devient :



et donc

où [IG] est la matrice d'inertie du solide ; et, si cette matrice d'inertie est constante (par exemple si le solide est indéformable) :
- .

Si G se trouve sur (Δ), cela se simplifie encore : et sont colinéaires, puisque tous deux colinéaires à (Δ), d'où



On peut encore simplifier cette équation sous la forme

où I(Δ) est le moment d'inertie autour de l'axe de rotation, et est le vecteur accélération angulaire.

Bibliographie
- Michel Combarnous, Didier Desjardins et Christophe Bacon, Mécanique des solides et des systèmes de solides, Dunod, coll. « Sciences sup », , 3e éd. (ISBN 978-2-10-048501-7), p. 20-21, 30-31, 50-54,
- J. Lelong-Ferrand et J.M. Arnaudiès, Géométrie et cinématique, Dunod Université, , 2e éd. (ISBN 2-04-003080-8)
Voir aussi
Articles connexes
 Portail des mathématiques
Portail des mathématiques  Portail du génie mécanique
Portail du génie mécanique