Chang'e 4
Chang'e 4 (du chinois : 嫦娥四号 ; pinyin : , de Chang'e, déesse de la Lune dans la mythologie chinoise) est une sonde spatiale lunaire chinoise dont le lancement a eu lieu le . L'engin est une réplique de la sonde lunaire Chang'e 3, lancée en 2013. C'est le 8e engin spatial chinois lancé vers la Lune et le deuxième à s'y poser. Chang'e 4 comprend un atterrisseur et un rover. Les deux engins spatiaux emportent plusieurs instruments dont des caméras, un spectromètre infrarouge pour mesurer la composition du sol à proximité du rover et un radar détectant la structure superficielle du sous-sol ainsi qu'un spectromètre radio pour analyser les éruptions solaires. La mission primaire doit durer 90 jours.
Sonde spatiale
| Organisation | CNSA (Chine) |
|---|---|
| Programme | Chang'e |
| Domaine | Étude du sol et de la structure interne de la Lune |
| Type de mission | Atterrisseur + Astromobile |
| Statut | Sur le sol lunaire |
| Lancement | 7 décembre 2018 (UTC) |
| Lanceur | Longue Marche 3B |
| Durée |
Atterrisseur : 12 mois |
| Identifiant COSPAR | 2018-103A |
| Masse au lancement |
~3 780 kg Rover : 140 kg |
|---|
| Atterrissage | 3 janvier 2019 |
|---|---|
| Localisation | cratère Von Kármán |
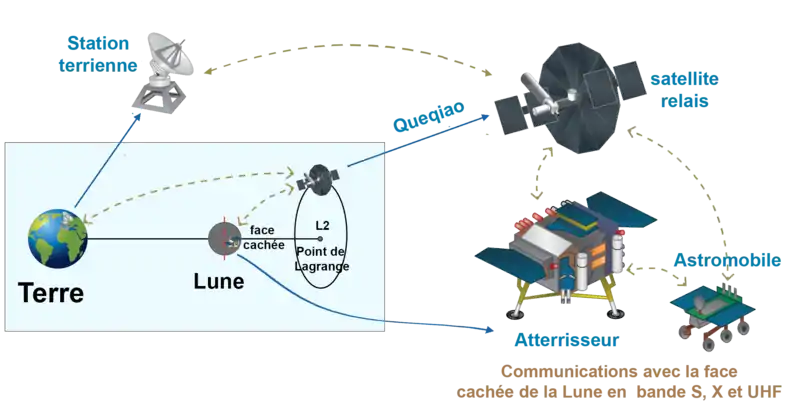
La sonde spatiale s'est placée en orbite lunaire le . L'atterrisseur s'est posé sur la face cachée de la Lune le dans le cratère Von Kármán. Il s'agit du premier atterrissage d'un engin spatial sur cette face de la Lune. Un satellite de télécommunications, baptisé Queqiao a été placé au point de Lagrange L2 du système Terre-Lune pour jouer le rôle de relais, la Lune faisant obstacle aux communications entre Chang'e 4 et la Terre.
Contexte : le programme chinois d'exploration lunaire

La Chine développe rapidement son programme spatial dans tous les domaines au cours de la décennie 2010. En ce qui concerne l'exploration du système solaire, les responsables chinois ont concentré leurs efforts sur la Lune. Le programme chinois d'exploration lunaire démarre officiellement en . L'orbiteur Chang'e 1 est lancé en 2007. Lui succède en 2010 l'orbiteur Chang'e 2 qui est chargé d'effectuer des reconnaissances approfondies de la surface en vue d'un futur atterrissage des prochaines sondes spatiales. Après avoir rempli ses objectifs, Chang'e 2 quitte l'orbite lunaire et se positionne près du point de Lagrange L2 pour permettre aux opérateurs chinois de vérifier leur capacité à contrôler la sonde spatiale dans cette région éloignée de l'espace. La sonde spatiale quitte le point de Lagrange L2 pour survoler à très faible distance (3,2 km) l'astéroïde Toutatis en prenant des photos avec une résolution spatiale de 10 mètres. L'agence spatiale chinoise parvient à poser avec succès sur le sol lunaire en 2013 l'atterrisseur Chang'e 3. Il s'est écoulé 37 ans depuis le dernier atterrissage réalisé par une sonde spatiale soviétique. Chang'e 3 emporte un rover de 140 kilogrammes[2]. Celui-ci parcourt une centaine de mètres avant de s'immobiliser un peu plus d'un mois après l'arrivée sur le sol lunaire. Chang'e 4 constitue une copie de Chang'e 3 mais le site d'atterrissage choisi est cette fois situé sur la face cachée de la Lune ce qui rend impossible toute communication sauf à disposer d'un satellite relais. De manière symbolique, la Chine vise une première spatiale puisque ni la NASA ni l'Union soviétique n'ont jamais posé d'engins spatiaux sur cette face non visible depuis la Terre. La mission suivante Chang'e 5 a pour objectif de ramener un échantillon du sol lunaire sur Terre.
Sélection du site d’atterrissage
Le site d'alunissage retenu, le cratère Von Kármán, est situé sur la face cachée de la Lune au sud-est de la Mare Ingenii et dans le bassin d'impact Aitken. Celui-ci constitue le plus ancien et le plus grand des cratères lunaires et à ce titre présente un intérêt particulier pour les scientifiques. La mission a pour objectif de déterminer la géologie de la région ainsi que la composition des roches et du sol[3].
Les responsables du projet avaient évoqué initialement le cratère Apollo comme la destination la plus probable. D'après les données recueillies par la sonde lunaire Chandrayaan-1, ce bassin d'impact situé sur la face cachée de la Lune pourrait contenir des matériaux en provenance des couches profondes de la croûte. D'autres destinations sont également à l'étude dans des mares basaltiques situées à l'intérieur ou à l'extérieur du Bassin Pôle Sud-Aitken comme Moscoviense, Orientale, Ingenii, et Australe[4],[5].

Déroulement de la mission
Lancement
La sonde spatiale Chang'e 4 a été lancée le , 18 heures 24 UTC ( à 2 h 24 heure locale) par une fusée Longue Marche 3-B qui a décollé de la base de lancement de Xichang avec comme objectif d'atterrir sur le sol lunaire environ 27 jours plus tard[6]. L'atterrisseur doit se poser dans le cratère Von Kármán situé sur la face cachée de la Lune[3]. La Lune s'interpose entre Chang'e 4 et la Terre. Les données peuvent être échangées avec la Terre via un satellite de télécommunication Queqiao lancé le et placé sur une orbite de Lissajous autour du point de Lagrange L2 du système Terre-Lune. Depuis cette orbite le satellite a en visibilité à la fois la Terre et le site d'atterrissage de Chang'e 4[7],[8].
Transit et atterrissage à la surface de la Lune
Chang'e 4 a été injecté par son lanceur sur une trajectoire visant directement la Lune. Trois manœuvres de correction de trajectoire étaient prévues durant le transit de l'engin spatial entre la Terre et la Lune. L'injection sur sa trajectoire par le lanceur ayant été suffisamment précise, la première manœuvre n'a pas eu besoin d'être effectuée. La deuxième manœuvre a été réalisée le . La troisième correction de trajectoire a été annulée car elle ne s'est pas avérée nécessaire. Le à 8 h 39, la sonde lunaire chinoise Chang’e-4 a réussi sa manœuvre de freinage et s'est insérée sur une orbite lunaire de 100 x 400 km. Après avoir orbité durant 20 jours autour de la Lune pour tester le fonctionnement des instruments, tester les liaisons radio avec le satellite relais Quequio et effectuer des repérages[9]. Chang'e-4 s'est posé le à 2 h 26 UTC dans le cratère Von Kármán situé sur la face cachée de la Lune (coordonnées : 177.6° E, 45.5° S)[10].
Exploration de la surface de la Lune
Quelques heures après l'atterrissage de Chang'e 4, le , la rampe permettant à l'astromobile Yutu-2 de descendre sur le sol lunaire est déployée. Le rover fait ses premiers tours de roue sur la Lune à 14 h 22 UTC[11] effectuant une douzaine de mètres vers un cratère d'impact d'une quinzaine de mètres. Il ne change plus de place jusqu'au . Entre-temps, il est mis hors tension car la température monte au point d'approcher les 200 °C. Le 10, alors que le soleil s'est rapproché de la ligne d'horizon, Yutu-2 opère un demi-tour et parcourt une trentaine de mètres, en contournant et en photographiant le module d'atterrissage (alunisseur).
Du 13 au , le rover connait sa première nuit lunaire. Un des deux panneaux solaires du rover a été replié pour que celui-ci soit isolé au mieux du froid tandis qu'un petit générateur radioisotopique est mis en service pour l'aider à conserver un maximum de chaleur. Il sera annoncé plus tard que la température est descendue à -190 °C.
Le , le rover est réactivé pour amorcer sa deuxième journée. Deux jours plus tard, la sonde américaine LRO le photographie, ainsi que le module d'atterrissage. Ce jour-là, il effectue un déplacement d'une dizaine de mètres. Le , alors qu'il a parcouru 120 mètres depuis son arrivée, débute sa seconde nuit lunaire.
Le rover est réactivé le et l'alunisseur, le à 7 h 52 (heure chinoise). Selon une déclaration officielle, les liaisons avec le satellite relais Queqiao et le fonctionnement des deux engins sont nominaux. Au début de sa troisième journée, le rover parcourt 43 mètres[12]. Le , il entre dans sa cinquième nuit lunaire. Il a alors parcouru 178,9 mètres[13].
Les autorités chinoises fournissent très peu de commentaires sur le déroulement de la mission. Selon Philippe Coué, ingénieur en aéronautique, « il est possible que le pouvoir cadenasse les informations sur un programme devenu ultrastatégique en Chine, car il vise à préparer l'arrivée d'astronautes sur la Lune »[14].
À partir des quelques informations fournies par les Chinois, certains chercheurs américains indiquent le trajet effectué par Yutu-2 entre le et le [15].
Caractéristiques techniques
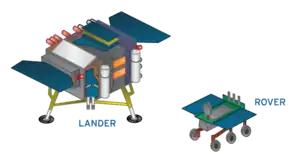
La mission spatiale comprend un atterrisseur qui s'est posé en douceur sur la Lune emportant un astromobile (rover). Leurs caractéristiques sont identiques à celles des engins de la mission Chang'e 3. La sonde spatiale a une masse au lancement de 3 780 kg. Une fois posé au sol, l'atterrisseur a une masse de 1 200 kg et l'astromobile (rover) une masse de 140 kg[7],[16].
Atterrisseur
L'atterrisseur dispose de plusieurs types de moteurs qui reposent sans doute sur des moteurs-fusées à ergols liquides, brûlant un mélange d'UDMH et de peroxyde d'azote. Le moteur-fusée principal est sans doute le moteur à poussée modulable disposant d'un système de régulation à aiguille, déjà expérimenté dans l'espace dans le cadre d'autres missions chinoises. Sa poussée peut être établie à une valeur comprise entre 1 500 et 7 500 newtons (N), ce qui constitue une amplitude suffisante pour permettre un atterrissage en douceur, sur un satellite dont la gravité est égale à un sixième de celle de la Terre. La poussée peut être fixée avec une précision de 7,5 newtons et le moteur dispose d'un système de refroidissement actif. Les ergols sont mis sous pression par un gaz inerte. Vingt-huit petits propulseurs sont par ailleurs utilisés pour les petites corrections de trajectoire et pour les modifications d'orientation. Huit modules de propulsion, composés chacun de deux propulseurs de 150 N et d'un propulseur de 10 N, sont installés sur des panneaux de petite taille recouvrant l'atterrisseur, et permettent de stabiliser celui-ci sur trois axes. Quatre autres propulseurs de 10 N sont fixés de manière isolée.
Pour l'atterrissage, la sonde spatiale utilise plusieurs instruments : un système inertiel sert, au début de cette phase, à déterminer la trajectoire ; puis, à l'approche du sol, un altimètre laser et un capteur à micro-ondes interviennent pour déterminer la vitesse et la distance restante. Quand la sonde arrive à cent mètres de la surface lunaire, l'ordinateur de bord utilise les images fournies par une caméra de descente et par un système de reconnaissance de forme, pour trouver un terrain d'atterrissage dépourvu d'obstacles. Le train d'atterrissage comprend quatre pieds faisant un angle de 30° avec la partie centrale de l'atterrisseur, renforcés par deux poutrelles attachées à cette partie centrale, et sont munis d'absorbeurs de choc pour résister à l'impact. Les pieds sont munis de larges semelles pour éviter de s'enfoncer de manière trop importante dans le sol. La masse de l'atterrisseur, une fois parvenu sur le sol lunaire, est de 1 200 kg. L'énergie électrique lui est fournie par des panneaux solaires et par un générateur thermoélectrique à radioisotope. Celui-ci est utilisé durant la nuit lunaire (d'une durée de quinze jours terrestres), pour alimenter les résistances chauffantes qui permettent de maintenir une température minimale. Le rover est solidement fixé sur l'atterrisseur. Une fois celui-ci posé, deux rampes sont déployées pour permettre au rover de descendre sur le sol lunaire[17].
Le rover
Pratiquement identique à Yutu 1, Yutu 2, est un engin autonome à six roues, d'une masse de 140 kg dont 20 kg de charge utile. Haut de 1,5 mètre, il comporte un mât servant de support aux caméras de navigation et panoramique ainsi qu'à l'antenne parabolique utilisée pour les communications avec la Terre. Un bras articulé est utilisé comme support pour un des instruments scientifiques. Il a une durée de vie prévue de 90 jours (trois jours et trois nuits lunaires). Son énergie est fournie par des panneaux solaires. Le rover se met en mode veille durant la nuit lunaire (longue de quinze jours terrestres) lorsque la température tombe à 180 °C au-dessous de zéro et survit grâce à l'énergie stockée dans ses batteries, sans doute complétées, comme ses homologues américains et russes, par des unités de chauffage à base d'isotopes radioactifs de plutonium 238. Le système de locomotion utilise un châssis similaire à celui des rover américains, pour faciliter le franchissement des obstacles. Chaque roue est motorisée avec un moteur électrique sans balais alimenté en courant continu.
Le rover est conçu pour parcourir une distance maximale de 10 km et peut explorer une surface de 3 km2. Il peut monter une pente de 20° et franchir un obstacle de 20 cm de haut. Il utilise un algorithme de Delaunay pour analyser les images fournies par ses caméras de navigation et celles destinées à éviter les obstacles, afin d'en déduire la route à suivre. Compte tenu du faible temps d'aller-retour d'un signal radio Terre-Lune (2,5 secondes), il est prévu que le rover puisse être également télécommandé par un opérateur humain[17].
Le , alors que le rover amorce sa deuxième nuit lunaire, il a parcouru 120m, soit cinq de plus que Yutu 1[18].Le , avant de commencer sa troisième nuit lunaire, le rover a parcouru 163 mètres[19]. Le , pour sa quatrième nuit lunaire, 178,8 mètres[20].
Instrumentation scientifique
Atterrisseur
L'atterrisseur reprend deux instruments de Chang'e 3[7] :
- la caméra LCAM (Landing Camera) utilisée pour prendre des photos durant la descente
- la caméra topographique TCAM ( Terrain Camera) qui n'avait pas résisté à la première lunaire.
De nouveaux instruments sont ajoutés[4],[7] :
- le spectromètre LFS (Low Frequency Spectrometer) est utilisé pour détecter les variations du champ électrique basse fréquence générées par les tempêtes solaire. Il devrait bénéficier de l'environnement radio très calme du site (la Lune s'interpose entre le site et la Terre). Les données collectées permettront d'étudier le plasma lunaire présent au-dessus du site d'atterrissage[16].
- un dosimètre à neutrons LND (Lunar Lander Neutrons and Dosimetry) fourni par l’université de Kiel en Allemagne pour mesurer la quantité d'eau présente dans le régolithe lunaire dans le but de préparer de futures missions habitées. Ses 10 détecteurs au silicium permettent de mesurer les protons ayant une énergie comprise entre 10 et 30 MeV, les électrons dont l'énergie est comprise entre 60 et 500 keV, les particules alpha de 10 à 20 MeV par noyau et les ions lourds de 15 à 40 MeV. Deux détecteurs utilisant un sandwich Gd mesurent les flux de neutrons thermiques qui permettent de déterminer la présence d'eau dans le sous-sol et de déterminer les processus qui brassent la couche superficielle du sol[16].
- un container de 3 kilogrammes contenant des graines de pommes de terre et d'Arabidopsis dans le but d'étudier la respiration des graines et la photosynthèse sur le sol lunaire. La température à l'intérieur de cette mini-biosphère est maintenue entre 1 et 30 °C tandis que l'humidité et les éléments nutritionnels sont strictement contrôlés. La lumière est canalisée par un tube vers les plantes pour permettre leur croissance. L'expérience a été conçue conjointement par 28 universités[3]. La Chine a annoncé (photo à l'appui) que des graines avaient bien germé dans l'atterrisseur durant les 9 jours de l'expérience, à la suite de quoi le froid extrême a tout gelé. On notera que certaines photos de grande germe diffusées dans les médias proviennent de l'expérience témoin sur Terre[21].
Rover
Le rover de son côté reprendrait trois des quatre instruments de Yutu, le rover de la mission Chang'e 3[4],[7] :
- la caméra panoramique PCAM (Panoramic Camera) fournit des images tridimensionnelles de la zone d'atterrissage et des régions explorées par le rover et permet de déterminer la morphologie de la surface et la structure géologique[16].
- le spectromètre imageur VNIS (Visible and Near-Infrared Imaging Spectrometer) fonctionne en lumière visible et en infrarouge. Il comprend un spectromètre imageur fonctionnant dans les longueurs d'onde 0,45-0,95 micron et un spectromètre infrarouge infrarouge (0,9-2,4 microns)[16];
- le radar LPR (Lunar Penetrating Radar) utilisé pour étudier les structures géologiques du sous-sol et cartographier le régolithe lunaire.
- l'analyseur d'atomes neutres ASAN (Advanced Small Analyzer for Neutrals) fourni par la Suède est similaire à un instrument ayant volé sur l'orbiteur lunaire indien Chandrayaan-1. Ce nouvel instrument doit analyser les structures souterraines proches de la surface.
Satellite relais Queqiao
Le satellite relais Queqiao, qui a été lancé le , 6 mois avant le rover pour lui permettre de rejoindre le point de Lagrange L2 du système Terre-Lune, emporte[4] :
- un spectromètre radio à basse fréquence fourni par les Pays-Bas ;
- une caméra pour détecter les flash des impacts sur la surface de la Lune (sous réserve) ;
- une caméra permettant d'identifier les émissions de sodium (sous réserve).
Résultats scientifiques
Les premiers résultats de la mission sont publiés en et montrent que des roches d'une composition proche de celle supposée du manteau se trouvent en surface, sans doute à la suite d'un impact de météorite[22].
Bibliographie
Notes et références
- (en) Dave Mosher, « China says it will launch 2 robots to the far side of the moon in December on an unprecedented lunar exploration mission », Business Insider,
- (en) Rui C. Barbosa, « China returning to the Moon with Chang’e-4 mission p.2 », sur nasaspaceflight.com,
- (en) Paul Rincon, « Chang'e-4: China mission launches to far side of Moon! », BBC,
- (en) Emily Lakdawalla, « Plans for China's farside Chang'e 4 lander science mission taking shape », The Planetary Society,
- « 嫦娥四号:2018年6月长征四号丙火箭从西昌发射中继通信卫星,在2018年底长征三号乙火箭发射着陆器和巡视器。 - China Spaceflight », sur www.chinaspaceflight.com (consulté le )
- (en) Emily Lakdawalla, « Liftoff for Chang'e-4! », The Planetary Society,
- (en) Andrew Jones, « Pioneering Chang’e-4 lunar far side landing mission to launch in December », sur spacenews.com,
- (en) Emily Lakdawalla, « Updates on China's lunar missions », The Planetary Society,
- (en) Luyuan Xu, « Chang’e-4 Successfully Enters Lunar Orbit Next stop: the Lunar Farside », The Planetary Society,
- (en) Jason Davis, « China successfully lands Chang'e-4 on far side of Moon », The Planetary Society,
- (en) Jason Davis, « Chang'e-4 deploys rover on far side of the Moon », The Planetary Society, .
- La navette Chang'e 4 entre dans la troisième nuit lunaire, Spaceworld.
- La sonde chinoise Chang'e-4 passe en mode "sommeil", FrenchChina.org, 12 avril 2019.
- Chang’e 4 : la Chine atteint la face cachée de la Lune… sans la dévoiler, Philippe Henarejos, Ciel et Espace n° 564, mars-avril 2009, pp. 28-33.
- Andrew Jones, Yutu-2 Rocks On into Lunar Day 3 for Chang’e-4 mission, 6 mars 2019.
- (en) Rui C. Barbosa, « China returning to the Moon with Chang’e-4 mission », sur nasaspaceflight.com,
- (en) « Chang'e 3 - Mission Overview - mission updates », sur http://www.spaceflight101.com (consulté le )
- La sonde chinoise Chang'e-4 passe de nouveau en mode veille, Renmin Ribao (Quotidien du Peuple), édition française, 14 février 2019
- « Le rover lunaire chinois devrait fonctionner au-delà de sa durée de vie prévue », sur french.china.org.cn, (consulté le )
- « La sonde chinoise Chang'e-4 reprend le travail pour son cinquième jour lunaire », sur french.china.org.cn, (consulté le )
- « La Chine a fait pousser du coton sur la Lune, mais le froid a tout détruit », sur Numerama, (consulté le )
- (en) Chunlai Li, Dawei Liu, Bin Liu et al., « Chang’E-4 initial spectroscopic identification of lunar far-side mantle-derived materials », Nature, vol. 569, (lire en ligne).
Voir aussi
Articles connexes
Liens externes
- Film de l'atterrissage, Futura sciences,
- Premières images
- (en) Page dédiée sur le site Eo Portal de l'agence spatiale européenne
 Portail de l’astronautique
Portail de l’astronautique  Portail de la Chine
Portail de la Chine  Portail de la Lune
Portail de la Lune