Deep Space 1
Deep Space 1 est une mission spatiale de l'agence spatiale américaine, la NASA, destinée à tester de nouvelles technologies. Elle est lancée le et s'achève le . Cette petite sonde spatiale de 487 kilogrammes est le premier engin à utiliser un moteur ionique comme propulsion principale. Deep Space 1 est également la première mission du programme New Millennium, dont l'objectif est de mettre au point les équipements utilisés par les engins interplanétaires de taille réduite imposée par la nouvelle stratégie d'exploration du système solaire (« faster, cheaper, better »).
Sonde spatiale expérimentale

| Organisation |
|
|---|---|
| Constructeur |
|
| Programme | New Millennium |
| Domaine | Technologie, Étude d'objets célestes mineurs |
| Type de mission | Survol |
| Statut | Mission achevée |
| Lancement | 24 octobre 1998 |
| Lanceur | Delta II 7326 |
| Fin de mission | 18 décembre 2001 |
| Identifiant COSPAR | 1998-061A |
| Site | http://nmp.jpl.nasa.gov/ds1/ |
| 29 juillet 1999 | Survol de l'astéroïde Braille |
|---|---|
| 22 septembre 2001 | Survol de la comète Borrelly |
| Masse au lancement | 486,32 kg |
|---|---|
| Propulsion | Ionique |
| Ergols | Xénon, Hydrazine |
| Masse ergols | 113 kg dont 81,5 kg de xénon |
| Δv | 4,2 km/s |
| Contrôle d'attitude | Stabilisé 3 axes |
| Source d'énergie | Panneaux solaires |
| Puissance électrique | 2,5 kW à 1 ua |
| MICAS | Caméras/Spectromètres |
|---|---|
| PEPE | Spectromètre à ions et électrons |

Deep Space 1 accomplit sa mission avec succès, en démontrant en particulier que la propulsion ionique dispose de l'endurance nécessaire pour propulser une mission interplanétaire de longue durée sans perturber le fonctionnement des instruments scientifiques. La sonde spatiale atteint également ses objectifs secondaires en survolant l'astéroïde (9969) Braille et la comète Borrelly tout en collectant des données scientifiques et des photographies de ces corps mineurs.
Contexte
Le programme New Millenium
Deep Space 1 est la première mission spatiale du programme New Millennium (NMP) de la NASA. New Millenium s'inscrit dans la nouvelle stratégie d'exploration du système solaire de la NASA mise en place par son administrateur Daniel Goldin, consistant à développer des missions moins coûteuses que par le passé (« faster, cheaper, better ») mais plus nombreuses. Jusque là, les nouvelles technologies spatiales étaient testées sur les missions opérationnelles en profitant de leurs budgets très importants comme le recours aux mémoires flash durant la mission Cassini. Cette option n'est plus envisageable dans le cadre des nouvelles missions, qui imposent pour limiter les coûts, d'utiliser des technologies parfaitement rodées. Pourtant ces nouvelles missions nécessitent la mise au point de nouvelles technologies spatiales permettant la miniaturisation et la réduction des coûts. Pour gérer ce besoin Charles Elachi, directeur du centre JPL, propose à Goldin, un nouveau programme rassemblant des missions développées dans l'esprit du « faster, cheaper, better » et consacrées à la qualification de ces nouvelles techniques avant leur déploiement sur des missions plus opérationnelles. Parmi ces technologies figurent notamment la propulsion ionique. La gestion du programme est confiée au centre Jet Propulsion Laboratory (JPL) de la NASA. Les objectifs principaux de ces missions sont donc d'abord d'ordre technique, les retombées scientifiques étant un objectif secondaire. En , le Congrès américain donne son accord pour le lancement du programme New Millennium et en particulier pour le développement d'une mission Deep Space 1 consacrée principalement à la mise au point de la propulsion ionique[1].
Recherche sur la propulsion ionique à la NASA

Le développement de la propulsion ionique débute à la NASA dans les années 1950. Le docteur Harold Kaufman du centre de recherche Lewis (établissement de la NASA), construit le premier moteur de ce type en 1959. En 1964, un petit satellite expérimental, Space Electric Rocket Test 1 (SERT 1), est lancé par une fusée Scout. Un des deux moteurs parvient à fonctionner durant 31 minutes. SERT 2 également équipé de deux moteurs ioniques est mis en orbite en 1970 : un des deux moteurs fonctionne durant 5 mois (3 871 heures en continu), l'autre durant 3 mois. Ces premiers moteurs utilisent comme ergols soit du césium soit du mercure. Mais ces deux éléments chimiques présentent des inconvénients et les ingénieurs choisissent pour les moteurs suivants le xénon qui s'avère plus simple à utiliser. Au début des années 1960 le centre de recherche HRL Laboratories situé à Malibu (Californie), filiale du constructeur aérospatial Hughes, travaille également sur la propulsion ionique. Un premier moteur expérimental de ce constructeur est testé à bord du satellite militaire Geophysics Laboratory's Spacecraft Charging at High Altitude lancé en 1979. En août 1997, une version opérationnelle est installée à bord du satellite de télécommunications PanAmSat 5 : le moteur ionique est utilisé pour maintenir le satellite sur sa position géostationnaire et contrôler son orientation. Au début des années 1990, le Jet Propulsion Laboratory et le centre de recherche Lewis développent ensemble le moteur ionique NSTAR dans l'optique de l'utiliser pour propulser des engins spatiaux interplanétaires. Le centre Lewis fait fonctionner le moteur dans une chambre à vide durant 8 000 heures. Les tests qui s'achèvent en septembre 1997 sont un succès et la NASA décide de développer un moteur ionique opérationnel avec Hughes pour la mission Deep Space 1[2].
Conception et construction de Deep Space 1
La propulsion électrique (Solar Electric Propulsion ou SEP) avait été proposée dès les années 1970 pour des missions d'exploration du système solaire de la NASA ne nécessitant pas de manœuvres de freinage brutales (hors de portée de ce type de propulsion) comme le survol de comètes et d'astéroïdes (par exemple mission Halle/Tempel 2 International Comet Mission). Mais, malgré les tests effectués dans le cadre des missions SERT, cette technologie était considérée comme immature car les interactions avec les instruments scientifiques étaient mal connues tandis que la conception de missions utilisant ce type de propulsion, soumises à de fortes contraintes, n'était pas maitrisée. Deep Space 1, première mission du programme New Millennium, est initialement, dans l'esprit de ses concepteurs, une mission d'exploration d'objets mineurs (comètes, astéroïdes) destinée à tester une forte miniaturisation de tous les composants. L'objectif est que la masse totale au lancement de la sonde spatiale soit inférieure à 100 kilogrammes. Une étude plus poussée démontre que la technologie critique permettant d'alléger une sonde spatiale est la propulsion électrique et Deep Space 1 devint une mission consacrée à la qualification de cette technologie. Deep Space 1 embarque également un système de navigation autonome expérimental utilisant la position des étoiles pour la correction de sa trajectoire. Les responsables du JPL décident de développer cette nouvelle mission en un temps très court (36 mois) en se donnant comme objectif un lancement en juillet 1998. Spectrum Astro, une petite société de l'Arizona, est retenue pour la construction de la plateforme[3].
Objectifs technologiques
L'objectif principal de Deep Space 1 est de valider douze nouvelles technologies spatiales et plus particulièrement l'utilisation de la propulsion ionique qui n'a, jusque là, jamais été utilisée comme propulsion principale d'une mission interplanétaire[4],[5].
Moteur ionique NSTAR

NSTAR est le premier moteur ionique utilisé dans le cadre d'une mission interplanétaire. Le moteur alimenté électriquement par des panneaux solaires constitue le système de propulsion principal de la sonde spatiale.
Panneaux solaires
SCARLET (Solar Concentrator Array of Refractive Linear Element Technologies) : des panneaux solaires expérimentaux utilisant des cellules photovoltaïques de type GaInP2/GaAs/Ge recouverts de lentilles cylindriques ayant pour rôle à la fois de concentrer la lumière et de protéger les cellules. Ce système de lentille permet d'augmenter de 20% l'énergie produite par les cellules solaires et donc de réduire la masse consacrée à la production d'énergie.
Autonomie de la sonde spatiale
La multiplication des sondes spatiales qui découlent de la stratégie du « faster, cheaper, better » entraîne un plan de charges plus important pour les antennes géantes du Deep Space Network. Deep Space 1 teste trois nouvelles technologiques dont l'objectif est de permettre à la sonde spatiale d'être plus autonome et donc de réduire les échanges avec les équipes au sol[6] :
- Autonav : un système de navigation autonome qui réduit le nombre d'interventions depuis le sol. Il est en mesure de déterminer la position précise de l'engin spatial dans l'espace et, à partir des caractéristiques de la trajectoire planifiée, d'utiliser les moteurs chimiques ou le moteur ionique pour effectuer les corrections de trajectoire nécessaires ;
- Beacon Monitor est un système permettant d'informer périodiquement et de manière simple (signal ponctuel suffisamment puissant pour pouvoir être reçu par une antenne parabolique de quelques mètres de diamètre) les équipes sur Terre que l'engin spatial est en bonne santé ;
- Remote agent est un programme qui permet à la sonde spatiale de diagnostiquer les anomalies et de les corriger de manière autonome.
Instruments scientifiques
- MICAS (Miniature Integrated Camera And Spectrometer) comprend deux caméras comportant une optique commune (ouverture de 100 mm). Le rayonnement lumineux observé va de l'ultraviolet (80–185 nm) au proche infrarouge (1,2 à 2,4 microns) en passant par la lumière visible (longueur focale de 677 mm). Les deux caméras réalisent des images en lumière visible : l'une utilise un CCD fournissant des images de 1 024 × 1 024 pixels qui alimente en images le système de navigation autonome Autonav tandis que l'autre utilise un détecteur CMOS de 256 x 256 pixels. Un spectromètre ultraviolet analyse les longueurs d'onde 80-185 nm avec une résolution spectrale de 2,1 nm. Un spectromètre infrarouge analyse la bande spectrale 1 200–2 400 nm avec une résolution spectrale de 12 nm. L'instrument, fortement miniaturisé, a une masse totale de 12 kg. MICAS est utilisé pour étudier la composition chimique, la géomorphologie, la taille, la vitesse de rotation et l'atmosphère des astéroïdes et comètes lors de leur survol par la sonde spatiale. MICAS dérive de l'instrument PICS (Planetary Integrated Camera Spectrometer) développé au milieu des années 1990 pour la mission Pluto Fast Flyby qui fut annulée pour des raisons budgétaires avant son lancement[7],[8].
- PEPE (Plasma Experiment for Planetary Exploration) est un spectromètre à ions et électrons utilisé pour mesurer le vent solaire[9].
Télécommunications

- SDST (Small, Deep-Space Transponder) combine dans un ensemble compact et léger (3 kg) les différents équipements nécessaires aux échanges avec le sol : récepteur radio, détecteur de commande, modulation de télémesures, contrôles, etc. Cet équipement fonctionne en émission/réception en bande X et en émission en bande Ka ;
- un amplificateur de puissance à semi-conducteurs fonctionnant en bande Ka est testé pour la première fois. La bande Ka permet de disposer d'un débit beaucoup plus élevé qu'en bande X sans pour autant augmenter la taille de l'antenne et l'énergie nécessaire. Mais cette fréquence est plus facilement perturbée par les phénomènes météorologiques terrestres.
Micro électronique
- tests d'équipements électroniques utilisant une tension plus basse et donc moins gourmands en énergie[6].
- traditionnellement les équipements de régulation thermique, les circuits électroniques et les éléments de structures de la sonde spatiale sont conçus séparément et réunis lors de l'assemblage final de l'engin spatial. Cette expérience vise à tester une structure polyvalente combinant de manière compacte toutes ces fonctions[6].
- tests d'interrupteurs électriques permettant de mesurer la tension et l'intensité et de limiter le courant distribué[6].
Objectifs scientifiques

Deep Space 1 est principalement une mission destinée à mettre au point de nouvelles technologies mais des objectifs secondaires scientifiques, adaptés aux caractéristiques techniques de la sonde spatiale, ont également été définis. Il s'agit de survoler des corps mineurs orbitant sur des orbites proches de celle de la Terre. Selon la planification initiale la sonde spatiale doit survoler mi-janvier 1999 l'astéroïde (3352) McAuliffe à une vitesse relative de 6,7 km/s puis en la comète 76P/West-Kohoutek-Ikemura à une vitesse relative de 15 km/s. En avril 2000 la sonde spatiale devait survoler Mars et potentiellement effectuer à cette occasion un survol à faible distance de Phobos, lune de cette planète[10].
La date de lancement prévue est juillet 1998 mais des problèmes portant à la fois sur la mise au point des équipements et le développement des logiciels embarqués impose en mars 1998 de repousser le lancement à octobre 1998. Pour tenir ce nouvel objectif l'équipe projet décide de reporter après le lancement la mise au point du logiciel expérimental Remote Agent (qui sera téléchargé en cours de mission) tandis que le développement des autres logiciels s'appuie en partie sur des programmes réalisés pour la mission Mars Pathfinder. Le report de la date de lancement impose la modification des objectifs scientifiques. À partir d'une liste de 100 corps mineurs, la NASA sélectionne l'astéroïde 1992KD découvert en 1992 par des astronomes du centre JPL. Il s'agit d'un astéroïde aréocroiseur c'est-à-dire dont l'orbite coupe celle de Mars. Son orbite évolue rapidement et il devrait d'ici quelques milliers d'années devenir un astéroïde géocroiseur (coupant l'orbite de la Terre). L'analyse spectrale indique qu'il s'agit d'un des rares astéroïdes de type Q présents dans la ceinture d'astéroïdes. Cette particularité et l'évolution de son orbite en font un objectif scientifique particulièrement intéressant. Pour accroître l'intérêt du public, la NASA renomme l'astéroïde Braille en l'honneur de Louis Braille inventeur du système d’écriture tactile à points saillants à l’usage des personnes aveugles. À l'époque on estime que l'astéroïde est long de 3 km et de forme allongé. Il circule sur une orbite ayant une inclinaison de 28° par rapport au plan de l'écliptique. Deep Space 1 doit survoler l'astéroïde à une vitesse relative de 15,5 km/s[11].
Déroulement de la mission
Lancement

La fermeture de la fenêtre de lancement retenue (15 octobre-10 novembre 1998) est uniquement imposée par la nécessité de libérer le pas de tir pour le lancement des sondes Mars Surveyor (Mars Climate Orbiter et Mars Polar Lander). Deep Space 1 est lancée le depuis la base de lancement de Cap Canaveral (Floride) par une fusée Delta II 7326-9 Med-Lite dont c'est la première utilisation. La fusée emporte également un micro satellite SEDSat 1 développé par des étudiants qui est largué avant la mise à feu du troisième étage de la fusée. Cette dernière place la sonde spatiale sur une orbite héliocentrique de 1 × 1,3 ua. Dès le début de la mission les premiers problèmes apparaissent. Le viseur d'étoiles refuse de fonctionner mais les panneaux solaires se déploient correctement et le répéteur permet de confirmer que la trajectoire est conforme à ce qui est prévu[12],[13].
Étalonnage des instruments et transit vers l'astéroïde Braille
Le 10 novembre, le moteur ionique est mis en marche pour la première fois pour un test d'une durée prévue de 17 heures. Mais il s'éteint au bout de 4,5 minutes et toutes les tentatives pour le remettre en marche échouent. Les ingénieurs au sol partent de l'hypothèse que cet arrêt est provoqué par un court-circuit électrique dû à un débris coincé dans les grilles en molybdène du moteur. Ils décident de soumettre celles-ci à une exposition alternée au Soleil puis au froid de l'espace qui entraîne successivement leur expansion puis leur contraction en espérant que ces opérations parviendront à déloger le débris. Fin novembre, le moteur ionique est remis en marche et se met à fonctionner de manière nominale. Les dix premiers jours, la poussée est orientée de manière à maximiser l'effet Doppler des signaux reçus sur Terre afin de mesurer avec précision les performances du moteur, puis l'orientation de la sonde spatiale est modifiée de manière à la remettre sur la trajectoire d'interception de l'astéroïde Braille. Les problèmes rencontrés ne permettent pas d'effectuer l'étalonnage des caméras à l'aide d'images de la Terre et de Mars, ce qui aura des conséquences sur le déroulement ultérieur des opérations. Les opérations d'étalonnage de MICAS démontrent que le spectromètre ultraviolet fournit des données inexploitables et que, en lumière visible et infrarouge, les images prises par les caméras de MICAS sont touchées par une lumière parasite générée par la réflexion du rayonnement solaire sur certaines parties de la sonde spatiale. Le 22 janvier, l'équipe projet effectue des tests de modulation de la poussée qui permettent de vérifier que les transmissions et mesures effectuées avec les instruments de mesure du plasma ne sont pas perturbées par le fonctionnement du moteur ionique. Une mise à jour majeure des logiciels embarqués est transmise et installée en février. Les tests effectués par la suite avec le logiciel de navigation autonome Autonav démontrent que celui-ci fonctionne de manière satisfaisante. Le 27 avril, le moteur ionique est arrêté car la sonde spatiale est désormais sur une trajectoire balistique qui doit lui permettre de survoler l'astéroïde à faible distance. Depuis le lancement, le moteur ionique a fonctionné durant 1 800 heures et redémarré à 34 reprises. La vitesse a été modifiée de 699,6 m/s et 11,4 kilogrammes de xénon ont été consommés[14].
Survol de l'astéroïde Braille

Durant le survol de Braille Deep Space 1 doit prendre des photos et effectuer des analyses spectrales de l'astéroïde à l'aide de l'instrument MICAS tandis que l'instrument PEPE doit mesurer les perturbations du vent solaire qui pourraient révéler la présence d'un champ magnétique. On espère que l'impact du vent solaire sur la surface de l'astéroïde éjecte des ions qui grâce à l'analyse spectrale pourront être identifiés et fourniront ainsi des informations importantes sur la composition de Braille. Il est prévu que la sonde spatiale passe à 5-10 kilomètres de l'astéroïde soit la plus faible distance de toutes les missions spatiales passées. La caméra, au plus près de l'astéroïde, ne pourra pas suivre le déplacement de Braille et il n'est pas prévu de prendre d'images à ce moment-là. Aussi la meilleure résolution spatiale des photos de Braille ne sera que de 30 à 50 mètres. Une heure après le survol la sonde spatiale doit orienter son antenne vers la Terre et transférer les données recueillies par ses instruments[15].
Trente jours avant le survol, MICAS commence à prendre des photos du fonds du ciel pour alimenter le système de navigation AUTONAV qui effectue des corrections en utilisant comme référentiel les étoiles environnantes. Deux semaines avant la rencontre le logiciel de la sonde spatiale effectue avec succès une répétition de l'ensemble des opérations prévues durant cet événement. Toutefois la surface de l'astéroïde se révèle beaucoup plus sombre que prévu car MICAS ne parvient toujours pas à le distinguer. 40 heures avant le survol, les ingénieurs parviennent à identifier Braille sur les photos en utilisant un logiciel de correction qui n'est toutefois pas disponible à bord de la sonde spatiale. Braille est à environ 430 kilomètres de la position prévue et une commande qui doit permettre la correction de la trajectoire est envoyée à la sonde spatiale. Le , quelques heures avant le survol, la sonde spatiale passe temporairement en mode survie ce qui entraîne une correction de trajectoire moins précise. Comme prévu le détecteur CMOS de la caméra MICAS, plus fiable que le CCD, est utilisé dans les 27 dernières minutes précédent la rencontre pour orienter les instruments vers l'astéroïde qui va défiler à environ 26 kilomètres de la sonde spatiale à la vitesse relative de 15,5 km/s. Malheureusement le capteur CMOS ne parvient pas à repérer l'astéroïde sur les 23 images prises et aucun des instruments n'est pointé vers Braille au moment du survol. Après dépouillement des données par les équipes au sol, les seules images disponibles sont celles prises par la caméra CCD 70 minutes avant le survol à une distance de 40 000 kilomètres dans lesquels l'astéroïde ne représente que quatre pixels. En raison de la capacité limitée de la mémoire de masse de Deep Space 1, toutes les images prises à une distance plus proche avaient été supprimées pour faire de la place aux images à haute résolution attendues. Quelques informations ont néanmoins pu être tirées à partir de l'analyse des spectres infrarouges pris après le survol. Dans l'ensemble le survol a été considéré comme un échec sur le plan scientifique en partie en raison de caractéristiques inattendues de l'astéroïde mais en partie également du fait d'une préparation insuffisante des équipes au sol[16].
Prolongement de la mission
La mission primaire s'achève le 18 septembre 1999 mais la NASA décide de la prolonger de deux ans en débloquant 9,6 millions US$. Les objectifs technologiques ayant été atteints, les objectifs scientifiques prennent désormais le pas. L'objectif de la mission étendue est de réaliser un survol de la comète Wilson-Harrington en janvier 2001 à une vitesse relative de 15,8 km/s puis de la comète Borrelly en septembre 2001. Wilson-Harrington découverte une première fois en 1949 puis redécouverte en 1979 était une comète reclassée astéroïde car ne présentant plus les caractéristiques d'une comète lors des observations ultérieures. La taille du noyau est évalué à 4 km. Le survol s'annonce difficile car il doit se produire à un moment proche d'une conjonction solaire c'est-à-dire lorsque le Soleil s'interpose entre la sonde spatiale et la Terre interrompant les communications. Borrely découverte en 1904 par le marseillais Alphonse Louis Nicolas Borrelly est une comète typique avec une périodicité de 6,9 ans qui a pu être observée à chacun de ses passages près du Soleil. Son orbite est bien connue et des observations effectuée à l'aide du télescope Hubble en 1994 ont permis de déterminer ses caractéristiques : elle a une forme allongée (8,8 × 3,6 km) et sa période de rotation est de 25 heures. Son inclinaison par rapport au plan de l'écliptique est de 30° et son périgée (point de l'orbite proche du Soleil) se situe entre les orbites de Mars et de la Terre[17],[18].
Panne du viseur d'étoiles
Début août 1999, quelques dizaines d'heures après le survol de Braille, le moteur ionique de Deep Space 1 avait été remis en marche pour laisser toutes les options ouvertes en cas de prolongement de la mission. Pour atteindre sa première cible le moteur est arrêté le 20 octobre et la sonde spatiale suit désormais une trajectoire inertielle. À cette date le moteur ionique a fonctionné 3 571 heures en accélérant la sonde de 1,32 km/s et en consommant 21,6 kg de xénon. Le 11 novembre 1999 une avarie très grave frappe la sonde spatiale. Le viseur d'étoiles tombe en panne et, aucune redondance n'étant prévue, la sonde spatiale passe automatiquement en mode survie. Cette indisponibilité prive la sonde spatiale du seul équipement fournissant les données utilisées pour maintenir son orientation fixe par rapport aux étoiles. La sonde spatiale se met en rotation lente (1 tour par heure) en maintenant la surface des panneaux solaires perpendiculaires à la direction du Soleil. L'instrument PEPE s'est arrêté automatiquement sans qu'on sache si cet événement est corrélé avec la panne du viseur d'étoiles. Les responsables de la mission décident d'abandonner le survol de la comète Wilson-Harrington et de tenter d'effectuer le survol de Borrelly malgré l'indisponibilité du viseur d'étoiles. Fin 1999, le moteur ionique a consommé 22 kg de xénon en fournissant un delta-v de 1 300 m/s[17],[19].
Les responsables de l'agence spatiale envisagent l'arrêt de la mission car aucune solution ne semble permettre de contourner la panne du viseur d'étoiles. Le nouveau mode de stabilisation adopté ne permet pas d'utiliser l'antenne grand gain, car celle-ci n'est plus pointée vers la Terre, ce qui limite fortement le volume de données transmises. Finalement mi-janvier 2000, une nutation (oscillation de l'axe de rotation) est introduite dans le mouvement de rotation de la sonde spatiale ce qui permet à l'antenne grand gain d'être pointée de manière intermittente vers la Terre. Une grande quantité de données sur l'état de la sonde spatiale ainsi que certaines données scientifiques qui étaient restées stockées dans la mémoire de masse de la sonde spatiale à la suite de la panne peuvent être transmises vers la Terre[20].
Les ingénieurs au sol décident de reconfigurer le système de contrôle d'attitude de manière qu'il puisse utiliser les images fournies par la caméra de MICAS à la place de celle du viseur d'étoiles. Cette modification est complexe car le champ de vue de la caméra est beaucoup plus étroit que celui du viseur d'étoiles. Une étoile de référence relativement brillante, baptisée "thrustar", est sélectionnée pour le reste de la mission. Désormais le système de contrôle d'attitude modifie périodiquement l'orientation de la sonde spatiale pour pointer l'axe de la caméra de MICAS vers cette étoile puis déclenche la prise d'une image de celle-ci. Après avoir soustrait le fond d'étoiles, le programme mesure l'écart entre la position de l'astre constaté sur la photo et celle prévue puis, en fonction du résultat, envoie des commandes au système propulsif pour corriger l'orientation de Deep Space 1. Cette évolution du logiciel, dont la réalisation prend quatre mois et entraîne un surcoût de 800 000 US$, se fait dans l'urgence, car la sonde spatiale doit absolument redevenir opérationnelle avant début juillet, pour pouvoir effectuer les manœuvres permettant le survol de Borrelly. Le survol de la comète Wilson-Harrington, quant à lui, a été abandonné car la sonde spatiale n'a d'ores et déjà plus le temps de manœuvrer pour l'effectuer. La nouvelle version du logiciel de contrôle d'attitude est téléchargée fin mai. La modification est un succès et le 28 juin, avec une semaine d'avance sur la date limite, le moteur ionique est remis en marche pour modifier la trajectoire et permettre l'interception de Borrelly. Mais un autre problème apparait. Depuis la panne du viseur d'étoiles, la sonde spatiale a consommé une grande partie de l'hydrazine brûlée par ses petits moteurs-fusées pour corriger l'orientation et il ne reste plus qu'un tiers de la quantité initiale (31 kg) soit une quantité tout juste suffisante pour la phase de transit vers Borrelly. Pour réduire la consommation d'hydrazine, les ingénieurs décident d'utiliser de manière permanente le moteur ionique, qui est légèrement orientable, pour effectuer les corrections d'orientation. Lorsque la sonde spatiale n'a pas recours au moteur ionique pour corriger sa trajectoire, celui-ci est quand même utilisé avec une poussée fortement réduite pour économiser l'hydrazine. Conséquence de cette décision la sonde spatiale bat le 17 août le record de la plus longue durée d'utilisation sans interruption d'un système propulsif dans l'espace (162 jours). Ce record avait été établi par le satellite expérimental SERT 2. Entre fin octobre et fin novembre 2000 la sonde spatiale passe derrière le Soleil et le moteur ionique n'est plus utilisé que pour le contrôle d'attitude. Le 2 janvier, le moteur ionique fonctionne de nouveau à pleine puissance. Début mai la sonde spatiale a atteint sa trajectoire qui doit lui permettre d'intercepter la comète et le moteur ionique n'est plus sollicité que pour le contrôle d'attitude[17],[21].
Survol de la comète Borrelly


Le survol de la comète Borrelly, contrairement à celui de l'astéroïde Braille, est préparé avec soin par l'équipe au sol. Un programme téléchargé début mars à bord de Deep Space 1 a été conçu pour que la sonde spatiale puisse de manière autonome reconnaitre le noyau de la comète sur les images prises par la caméra MICAS. Deep Space 1 n'a pas été conçue pour résister aux impacts des particules de la queue de la comète et ses panneaux solaires pourraient être gravement endommagés durant le survol. Les responsables de mission choisissent de faire passer la sonde spatiale à 2 000 kilomètres du noyau ce qui donne une chance raisonnable de survie à la sonde spatiale sans compromettre les résultats scientifiques. Plusieurs télescopes, dont le télescope spatial Hubble, sont pointés vers la comète pour affiner sa position et permettre de corriger en connaissance de cause la trajectoire de Deep Space 1[22].
Les observations scientifiques débutent le 22 septembre, 12 heures avant le survol : l'instrument PEPE (mesure des électrons et des ions) commence à détecter les ions produits par la comète à une distance de 588 000 km de celle-ci tandis que l'onde de choc du vent solaire avec la queue de la comète est identifiée à 152 000 km de distance 2 heures et demi avant le survol. Au moment du survol la comète, qui a passé le point le plus proche du Soleil seulement 8 jours auparavant, est en pleine activité, éjectant des gaz sous l'action du Soleil. Les premières images prises par la caméra de MICAS 83 minutes avant le survol montrent un jet de poussière étroit de quelques kilomètres de large et de 100 kilomètres de long qui fait un angle de 30° avec la direction du Soleil. À partir de t-32 minutes (t heure de survol), deux images du noyau sont prises chaque minute. Pour économiser la place de stockage en mémoire, seuls les pixels entourant le noyau sont conservés. En tout 52 images de Borrelly sont prises. Deep Space 1 passe au plus près de la comète à 22h30 UTC à une vitesse relative de 16,6 km/s et à une distance d'environ 2 171 kilomètres. Pour économiser l'hydrazine aucune image n'est prise après le survol et 30 minutes après celui-ci la sonde spatiale modifie son orientation pour pointer son antenne grand gain vers la Terre et transmettre les données recueillies[23].
Deep Space 1 n'est que la deuxième mission après la sonde spatiale européenne Giotto à réussir à photographier de près le noyau d'une comète. La photo la plus détaillée est prise 170 secondes avant le passage au plus près alors que la sonde spatiale se trouvait à 3 556 km du noyau. La résolution spatiale, qui est de 47 mètres par pixel, permet de distinguer la forme proche de celle d'une quille de bowling qui serait longue de 8 km et large de 3,2 kilomètres. Les photos prises montrent de nombreuses cavités circulaires sombres de 200 à 300 mètres de diamètre qui ne sont pas de cratères d'impact mais plutôt des irrégularités de terrain produites par des effondrements ou le processus de sublimation. La surface est parsemée de cavités, crêtes, collines, stries et bosses qui semblent résulter de phénomènes de sublimation passés. Les zones actives (en cours de dégazage) ne représentent qu'environ 10% de la surface totale. Le noyau est particulièrement sombre ne reflétant généralement que 3% de la lumière. Les images de Borrelly confirment donc que la surface des comètes, contrairement à celle des astéroïdes, n'est pas façonnée par les impacts mais essentiellement par des phénomènes de sublimation. 157 secondes avant le passage au plus près de la comète, à une distance de 2 910 km, des spectres électromagnétiques du noyau sont collectés dans l'infrarouge. Aucun trace de glace d'eau n'est détectée mais tous les spectres contiennent une bande d'absorption qui pourrait correspondre à un mélange d'hydrocarbures. Les données spectrales permettent de déduire la température de la surface qui est comprise entre 30 °C (près du terminateur) et 70 °C. Les mesures de la composition de la queue de la comète indiquent la présence d'un grand nombre d'ions dérivés de la molécule d'eau dont la concentration atteint son maximum (90 %) à 1 500 km du noyau. La sonde spatiale survit sans dommage à la traversée de la queue : 17 impacts sont enregistrés sur l'antenne de l'instrument PEPE au cours de 4 périodes distinctes d'une durée de 0,5 seconde chacune[17],[24].
Fin de mission
Le 8 octobre débute une nouvelle phase de la mission, au cours de laquelle certains des tests effectués en début de mission sont répétés pour permettre d'évaluer le niveau de dégradation après un séjour de 3 ans dans l'espace. Le fonctionnement du moteur ionique est vérifié à différents niveaux de poussée. L'instrument PEPE est maintenu en marche en permanence. Plusieurs options sont envisagées pour la suite de la mission mais la quantité d'ergols restante est très faible. Selon les estimations, l'hydrazine restante ne permet de prolonger la mission que 3 mois et la quantité de xénon permet au moteur ionique de fonctionner à un régime très faible que 3 mois. Les responsables décident d'arrêter la mission et, le 22 septembre 2001, une commande est envoyée à la sonde spatiale pour qu'elle cesse d'émettre. En mars 2002 les ingénieurs du JPL tenteront sans succès de reprendre contact avec la sonde spatiale pour effectuer des tests en bande Ka. La sonde spatiale poursuit sa course sur une orbite héliocentrique de 1,22 x 1,46 Unité astronomique. Le moteur ionique a fonctionné en tout 678 jours sur une période de 3 ans en consommant 73,4 kg de xénon et en accélérant la sonde spatiale de 4,3 km/s[25].
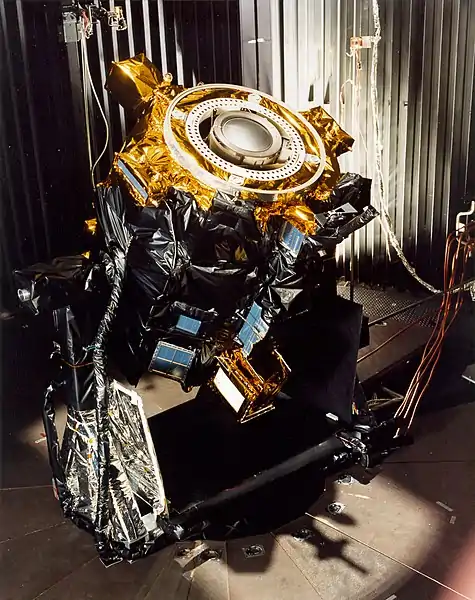
- Deep Space 1 complètement assemblée durant des tests

Caractéristiques techniques de Deep Space 1
Plateforme

La sonde Deep Space 1 est constituée d'une plateforme de forme parallélépipédique de 1,1 × 1,1 × 1,5 m dont la structure est en aluminium. La plupart des équipements sont fixés à l'extérieur de la structure de la sonde spatiale pour faciliter leur accès et leur remplacement durant les phases d'assemblage et de test. Les dimensions de la sonde spatiale avec les instruments et les antennes déployés atteignent 2,5 × 2,1 × 1,7 m. La masse au lancement est de 486,3 kg dont 31,1 kg d'hydrazine utilisée par les moteurs contrôlant l'orientation et 81,5 kg de xénon utilisé par le moteur ionique qui constitue la propulsion principale. Deep Space 1 dispose de deux ailes orientables composées chacune de quatre panneaux solaires recouverts de cellules photovoltaïques expérimentales (expérience SCARLETT II). Chaque panneau solaire a une superficie de 160 cm × 113 cm et l'envergure totale une fois les panneaux solaires déployés en orbite est de 11,75 mètres. Les panneaux solaires fournissent 2 500 watts à 1 ua au début de la mission dont 2 100 watts sont utilisés par le moteur ionique lorsqu'il est en marche. L'énergie est stockée dans une batterie nickel hydrogène de 24 Ah fournie par le Phillips Laboratory de l'Armée de l'Air américaine[26],[27],[13].
Le moteur ionique unique est installé à la base de la sonde spatiale, au milieu de l'anneau de l'adaptateur qui permet de fixer la sonde spatiale sur son lanceur, tandis que les antennes et la majorité des capteurs des instruments sont fixés à l'extrémité opposée. La sonde spatiale est stabilisée 3 axes. Son orientation est déterminée à l'aide un viseur d'étoiles, un capteur solaire et une centrale à inertie utilisant des gyroscopes laser. Les corrections d'orientation sont effectuées à l'aide de petits moteurs-fusées brûlant de l'hydrazine. Pour les communications avec la Terre, la sonde spatiale dispose d'une antenne grand gain fixe de 27,4 cm de diamètre au faisceau relativement ouvert(6°), de trois antennes faible gain, ces quatre antennes étant utilisées en bande X, et d'une antenne cornet en bande Ka, toutes montées sur la partie supérieure de la sonde ainsi que d'une antenne faible gain montée à la base. Les données sont transmises au sol avec un débit maximum de 20 kilobits/seconde[26],[27],[28],[13].
En application de la philosophie de coût réduit, l'antenne grand gain est une pièce de rechange de la mission Mars Pathfinder. Les équipements sont, dans la mesure du possible, acquis sur étagère. Par ailleurs, contrairement aux pratiques en vigueur, aucune redondance n'est prévue pour la plupart des équipements utilisant une technologie rodée. En particulier le contrôle d'attitude est pris en charge uniquement par les petits moteurs-fusées brûlant de l'hydrazine[27].
- Schéma de Deep Space vue sur les deux faces
 1 : Boitier de contrôle du moteur ionique - 2 : Batteries - 3 : Électronique capteur solaire - 4 : Capteur solaire - 5 : Instrument MICAS - 6 : Boitier contrôle énergie - 7 : Pare-soleil- 9 : Antenne grand gain - 10 et 11 : Antennes faible gain - 12 : Antenne cornet bande Ka - 12 : Batteries - 13 : Commutateur transfert guide d'ondes - 14 : Duplexeur - 15 : Panneau alimentation en xénon - 16 : Perche de service.
1 : Boitier de contrôle du moteur ionique - 2 : Batteries - 3 : Électronique capteur solaire - 4 : Capteur solaire - 5 : Instrument MICAS - 6 : Boitier contrôle énergie - 7 : Pare-soleil- 9 : Antenne grand gain - 10 et 11 : Antennes faible gain - 12 : Antenne cornet bande Ka - 12 : Batteries - 13 : Commutateur transfert guide d'ondes - 14 : Duplexeur - 15 : Panneau alimentation en xénon - 16 : Perche de service. 1 : Adaptateur lanceur et module de propulsion ionique - 2 : Expérience Multifunctional Structure - 3 : Centrale à inertie - 4 : Viseur d'étoiles - 5 : Panneaux solaires (en position repliée) - 6 : Antenne cornet bande Ka - 7 : Antennes à faible gain - 8 : Antenne à grand gain - 9 : Instrument PEPE - 10 : Pare-Soleil de MICAS - 11 : Transformateur électrique - 12 : Instrument MICAS - 13 : Distribution électrique - 14 : Ordinateur embarqué - 15 et 16 : Systèmes de diagnostic du moteur ionique.
1 : Adaptateur lanceur et module de propulsion ionique - 2 : Expérience Multifunctional Structure - 3 : Centrale à inertie - 4 : Viseur d'étoiles - 5 : Panneaux solaires (en position repliée) - 6 : Antenne cornet bande Ka - 7 : Antennes à faible gain - 8 : Antenne à grand gain - 9 : Instrument PEPE - 10 : Pare-Soleil de MICAS - 11 : Transformateur électrique - 12 : Instrument MICAS - 13 : Distribution électrique - 14 : Ordinateur embarqué - 15 et 16 : Systèmes de diagnostic du moteur ionique.
Le moteur ionique NSTAR

La propulsion principale est prise en charge par un moteur ionique (à grilles) baptisé NSTAR (NASA Solar Electric Propulsion (Technology Applications Readiness) monté sur la partie inférieure de la plateforme de la sonde. L'engin dont la grille (l'équivalent de la tuyère d'un moteur-fusée classique) a un diamètre de 30 cm comporte une chambre d'ionisation dans laquelle le xénon est injecté. Des électrons émis par une cathode ionisent le xénon en arrachant les électrons de ses atomes et en les transformant en ions avec une charge positive. Les ions sont accélérés par une grille portée à 1 280 volts à une vitesse de 40 km/s et sont éjectés dans l'espace. Le moteur fournit une poussée maximale 0,09 newton avec une consommation électrique de 2 500 watts. La force exercée est égale à peu près au poids d'une feuille de papier posée sur la main. L'orientation de l'axe de poussée peut être modifiée au maximum de 5° (en faisant pivoter tout le moteur avec deux degrés de liberté) pour corriger l'orientation de la sonde spatiale, mais en pratique cette fonction ne sera jamais utilisée au cours de la mission. La poussée peut être modulée avec 120 pas en réduisant l'énergie électrique consommée. La poussée minimale d'une valeur de Modèle:Unié est obtenue en consommant 500 W. Le rendement du moteur ionique est dix fois supérieur à celui d'un moteur-fusée chimique classique c'est-à-dire qu'il permet d'augmenter la vitesse de l'engin spatial dix fois plus avec la même quantité d'ergols. Sans le recours à la propulsion ionique et certains autres équipements expérimentaux, il a été estimé que la sonde spatiale aurait pesé environ 1 300 kg. La sonde spatiale embarque un ensemble d'instruments de mesurer IPS/IDS (Ion Propulsion System Diagnostic Subsystem) qui analyse l'impact de la propulsion ionique sur son environnement immédiat. Cet ensemble comprend 12 capteurs dont deux magnétomètres et un instrument de mesure des ondes de plasma[29],[4].
Résultats
L'ensemble de la mission a coûté 160 millions de dollars dont 95 millions pour le développement et la construction de la sonde spatiale, 43 millions pour le lancement, 10 millions pour les coûts d'exploitation durant l'extension de la mission entre septembre 1999 et décembre 2001 et environ 4 millions pour les aspects scientifiques[13]. Ce coût inclut le développement de certains des nouveaux équipements testés. Les résultats obtenus sont remarquables compte tenu de la modicité du coût de la mission et du cycle de développement très court (39 mois entre le début de la conception et le lancement). Malgré de nombreux problèmes rencontrés au cours de la mission, la sonde spatiale a atteint tous ses objectifs en validant l'ensemble des nouvelles technologies embarquées. La propulsion ionique a démontré plus particulièrement qu'elle était adaptée à une mission interplanétaire : le moteur a fonctionné en tout environ 15 300 heures soit 77 fois l'objectif minimal fixé à la mission pour la qualifier de succès. La propulsion a accéléré la sonde spatiale de 4,2 kilomètres par seconde en consommant seulement 70 kilogrammes de xénon. Deep Space 1 a de plus collecté des informations scientifiques d'une qualité inégalée sur les comètes lors du survol de Borrelly. Les technologies validées grâce à Deep Space 1 ont trouvé des applications pratiques sur de nombreuses missions postérieures[30],[31] :
- les moteurs ioniques constituent la clé de voûte de la mission Dawn lancée en 2006. Grâce à ceux-ci, la sonde spatiale dispose, malgré une taille réduite, d'une capacité d'accélération (différentiel de vitesse) de 10 km/s qui doit lui permettre de se placer en orbite autour des deux principaux corps célestes de la ceinture des astéroïdes, Cérès et Vesta. La propulsion ionique a rendu la mission possible en réduisant fortement son coût :
- la sonde Deep Impact a utilisé le système de navigation Autonav mis au point par Deep Space 1 pour calculer de manière automatique les manœuvres à effectuer pour son rendez-vous avec la comète Tempel 1 et pour larguer son impacteur de manière précise sur ce petit corps céleste ;
- la validation du recours à la bande Ka pour la télémétrie et les mesures Doppler a entraîné l'utilisation systématique de cette bande par les sondes spatiales à commencer par Mars Odyssey lancée en 2001.
Notes et références
- Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, p. 196
- Dossier de la mission pour la presse (presskit), p. 24-26
- Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, p. 196-197
- (en) « Deep Space 1 », sur National Space Science Data Center (NDDSC), NASA (consulté le )
- (en) ), « Deep Space 1 », sur EO Portal, Agence spatiale européenne (consulté le )
- Dossier de la mission pour la presse (presskit), p. 28
- (en) « Miniature Integrated Camera Spectrometer (MICAS) », sur National Space Science Data Center (NDDSC), NASA (consulté le )
- (en) Larry Soderblom et al., « Advanced Technologies Miniature Integrated Camera and Spectrometer (MICAS) », NASA/JPL, , p. 1-6 (lire en ligne)
- (en) « Plasma Experiment for Planetary Exploration (PEPE) », sur National Space Science Data Center (NDDSC), NASA (consulté le )
- Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, p. 202
- Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, p. 202-203
- Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, p. 203
- (en) « Deep Space 1: Quick Facts », sur Deep Space 1, NASA/JPL (consulté le )
- Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, p. 203-205.
- Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, p. 205.
- Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, p. 206-207
- (en) « Deep Space 1 », NASA (consulté le )
- Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, p. 207-208
- Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, p. 208
- Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, p. 209
- Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, p. 209-210
- Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, p. 210
- Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, p. 210-211
- Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, p. 211-214
- Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, p. 214-215
- Dossier de la mission pour la presse (presskit), p. 32
- Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, p. 197
- Deep Space 1 Telecommunications, p. 19
- Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, p. 198-200
- (en) Marc D. Rayman (NASA/JPL), « The Successful Conclusion of the Deep Space 1 Mission: Important Results without a Flashy Title », NASA/JPL,
- (en) Marc D. Rayman (NASA/JPL), « Mission log : 11 novembre 2001 », NASA/JPL,
Bibliographie
![]() : document utilisé comme source pour la rédaction de cet article.
: document utilisé comme source pour la rédaction de cet article.
NASA
- (en) NASA, Deep Space 1 Launch Press Kit, (lire en ligne [PDF])Dossier de presse fourni par la NASA pour le lancement de Deep Space 1
- (en) Marc D. Rayman, Philip Varghese et al., « Results from the Deep Space 1 Technology Validation Mission », Acta Astronautica, vol. 47, no 2, , p. 475-487 (DOI 10.1016/S0094-5765(00)00087-4, lire en ligne [PDF]) — Résultats de la mission primaire
- (en) Marc D. Rayman, « The Successful Conclusion of the Deep Space 1 Mission: Important Results without a Flashy Title », Space Technology, vol. 23, nos 2-3, , p. 185-198 (lire en ligne).
 — Résultats de la mission
— Résultats de la mission - (en) David H. Rodgers et al., « Advanced Technologies Demonstrated by the Miniature Integrated Camera and Spectrometer (MICAS) Aboard Deep Space 1 », Space Science Reviews, vol. 129, no 4, , p. 309–326 (DOI 10.1007/s11214-007-9155-9, lire en ligne) — Article sur l'instrument MICAS
- (en) Jim Taylor et al., Deep Space 1 Telecommnications, , 75 p. (lire en ligne [PDF]). Dossier sur les équipements de télécommunications de Deep Space 1.
Autre
- (en) Paolo Ulivi et David M Harland, Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, Springer Praxis, , 542 p. (ISBN 978-0-387-09627-8, lire en ligne). Description détaillée des missions (contexte, objectifs, description technique, déroulement, résultats) des sondes spatiales lancées entre 1997 et 2003.
Voir aussi
Articles connexes
Liens externes
- (en) Page dédiée sur le site de la NASA
- (en) Deep Space 1 sur le site EO Portal de l'Agence spatiale européenne
- (en) Série d'articles sur la mission rédigés par le responsable du projet Marc Rayman
- (en) Deep Space 1, Encyclopedia Astronautica
 Portail de l’astronautique
Portail de l’astronautique  Portail de l’astronomie
Portail de l’astronomie  Portail des planètes mineures et comètes
Portail des planètes mineures et comètes  Portail des États-Unis
Portail des États-Unis