Hayabusa (sonde spatiale)
Hayabusa (はやぶさ, « faucon pèlerin » en japonais), ou MUSES-C pour Mu Space Engineering Spacecraft C, est une sonde spatiale de l'Agence d'exploration aérospatiale japonaise (JAXA), ayant pour objectif l'étude du petit astéroïde Itokawa et la validation de plusieurs techniques d'exploration robotique innovantes. Pour sa mission, la sonde, qui pèse 510 kg, embarque plusieurs instruments scientifiques ainsi qu'un atterrisseur de petite taille pesant 600 grammes. L'objectif le plus ambitieux du projet est le retour sur Terre d'un échantillon de quelques grammes prélevés sur le sol de l'astéroïde.
Pour les articles homonymes, voir Hayabusa.

| Organisation |
JAXA |
|---|---|
| Domaine | Mission de retour d'échantillon d'astéroïde, technologie |
| Statut | Mission achevée |
| Lancement | (13h29 JST) |
| Lanceur | M-V |
| Fin de mission | |
| Durée de vie | 7 ans, 1 mois et 4 jours |
| Identifiant COSPAR | 2003-019A |
| Site | Site officiel |
| Masse au lancement | 510 kg |
|---|
| AMICA | Caméra spectromètre |
|---|---|
| LIDAR | Altimètre |
| NIRS | Spectromètre pour infrarouges |
| XRS | Spectromètre pour rayons X |
Lancée en 2003, la sonde atteint Itokawa en 2005 et étudie ses caractéristiques à l'aide des instruments embarqués. Plusieurs tentatives d'atterrissage, dont deux sont menées jusqu'au bout, ne parviennent pas à prélever un échantillon : la manœuvre, menée de manière autonome par la sonde, est rendue difficile par la très faible gravité d'Itokawa. Un peu de poussière a malgré tout été collectée. La sonde prend le chemin du retour vers la Terre pour ramener la capsule contenant d'éventuels échantillons. Plusieurs incidents de fonctionnement, qui affectent notamment sa propulsion, diffèrent la date d'arrivée initialement prévue en 2007. La capsule contenant les échantillons s'est détachée de la sonde à faible distance de la Terre le avant de réaliser une rentrée atmosphérique et d'atterrir sur le sol australien comme prévu.
À la suite des sondes spatiales américaines l'ayant expérimenté auparavant, Hayabusa confirme la capacité des moteurs ioniques à assurer la propulsion principale d'engins chargés de missions d'exploration du système solaire. Malgré leur poussée très modeste (moins d'un gramme), ces moteurs ont accéléré la sonde de plus de 3,5 km/s en consommant 50 kg de combustible. Les équipes de l'agence spatiale japonaise ont démontré leur savoir-faire en parvenant à ramener à bon port un engin privé à la fois des deux tiers de son système de contrôle d'attitude, de sa propulsion chimique et d'une partie de sa propulsion principale. Quelque 1500 particules de très petite taille (<10 micromètres) collectées sur le sol de l'astéroïde sont en cours d'analyse. Hayabusa a également contribué à améliorer de manière significative la connaissance des astéroïdes grâce aux mesures effectuées à l'aide de ses instruments scientifiques et aux photos à haute résolution prises sur place.
Les objectifs de la mission Hayabusa
La sonde spatiale Hayabusa poursuit à la fois des objectifs scientifiques de grande valeur et contribue à valider l'utilisation de technologies qui seront utilisées pour les futures missions de sondes spatiales dans le système solaire notamment dans le domaine de l'approche des corps à faible gravité.
Objectifs technologiques
Hayabusa est officiellement un démonstrateur technologique qui doit mettre au point des techniques permettant l'exploration d'objets célestes mineurs par des sondes spatiales. Cinq technologies clés sont mises en œuvre par Hayabusa[1] :
- le recours aux moteurs ioniques en tant que système de propulsion principal ;
- le système de navigation et de guidage autonome utilisant des systèmes de mesure optique. Compte tenu de l'éloignement de l'astéroïde durant les tentatives d'atterrissage, il s'écoule 40 minutes entre deux échanges avec la Terre. La sonde doit donc être en grande partie autonome pour mener à bien l'atterrissage de précision et la récupération de l'échantillon[2] ;
- le système de collecte d'échantillon développé pour les environnements en microgravité ;
- la rentrée directe depuis une orbite interplanétaire de la capsule contenant les échantillons ;
- la combinaison des propulseurs à faible poussée et de l'assistance gravitationnelle utilisée pour les modifications d'orbite.
Objectifs scientifiques
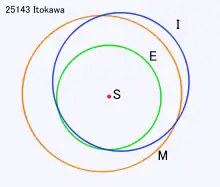
Le volet scientifique de la mission de Hayabusa porte sur l'étude de l'astéroïde Itokawa, baptisé en l'honneur du fondateur de l'astronautique japonaise Hideo Itokawa. Ce géocroiseur de petite taille (550 × 180 mètres), découvert en 1998 dans le cadre du projet LINEAR, décrit une trajectoire qui à son apogée se situe légèrement à l'extérieur de l'orbite martienne (1,695 Unité astronomique) et à son périgée légèrement à l'intérieur de l'orbite terrestre (0,953 UA). La sonde a pour mission d'obtenir des informations sur ce type d'astéroïde de type S d'une taille inférieure au kilomètre. La sonde doit mener une étude géologique et géomorphologique : analyse de la forme de l'astéroïde, de son axe de rotation, relevé topographique, mesure de sa densité. Enfin, sa composition sera déterminée notamment grâce à un spectromètre fonctionnant dans le proche infrarouge et un spectromètre de fluorescence X ainsi que par la mesure de l'intensité lumineuse et de la polarisation de la lumière réfléchie par la surface[3],[4]. Mais l'objectif le plus ambitieux de cette mission consiste à ramener un échantillon du sol de l'astéroïde.
Les météorites, qui sont souvent des fragments d'astéroïdes tombés sur Terre, fournissent des résultats difficiles à interpréter sur la composition de ces petits corps célestes ; des différences significatives apparaissent par rapport aux observations d'astéroïdes effectuées à l'aide de télescopes situés sur Terre. Des sondes spatiales comme Galileo et NEAR Shoemaker, cette dernière s'étant posée sur l'astéroïde (433) Éros en 2001, ont permis d'expliquer une partie de ces écarts. Mais un échantillon prélevé sur place permettrait de confirmer les théories élaborées[5]. Un retour d'échantillon apporte beaucoup plus d'informations qu'une analyse faite sur place par une sonde, car les équipements disponibles sur Terre sont beaucoup plus puissants que le laboratoire mobile qu'un engin spatial est en mesure d'emporter. La connaissance de la composition des astéroïdes et de leur mode de formation doit contribuer à la compréhension du mode de formation du système solaire. Hayabusa, du fait de sa petite taille et de la modicité du budget de la mission, emporte une instrumentation scientifique réduite (4 instruments) si on la compare à la sonde européenne Rosetta dont les 21 instruments représentent à eux seuls une masse de 180 kg. La sonde japonaise a néanmoins la capacité d'effectuer des investigations poussées.
Les caractéristiques techniques de Hayabusa

La sonde Hayabusa a la forme d'un parallélépipède rectangle long et large de 1,5 mètre et haut de 1,05 mètre. La sonde japonaise, qui pèse au lancement 510 kg, emporte 50 kg de carburant utilisé par des moteurs chimiques et 65 kg de xénon utilisé par des moteurs ioniques. La sonde est stabilisée sur 3 axes. Deux panneaux solaires (SCP), constitués de cellules solaires en arséniure de gallium et d'une superficie totale de 12 m2, se déploient de chaque côté de la sonde et fournissent 2,6 kW lorsque la sonde se trouve à une unité astronomique du Soleil ; l'électricité produite, primordiale pour la propulsion ionique, est stockée dans des batteries rechargeables de type lithium-ion (Li-ion) d'une capacité de 15 ampères-heures. Une antenne parabolique à haut gain (HGA) de 1,5 mètre de diamètre occupe une des faces du satellite. Elle assure les communications en bande X avec la Terre : la puissance atteint 20 W et le débit 8 ko/s ; elle est assistée par deux autres antennes à faible gain fixées sur d'autres faces de l'engin et fonctionnant en bande X. Les panneaux solaires, comme les antennes, sont fixes. Sur la face opposée à l'antenne principale, un cornet long d'un mètre et comportant à sa partie inférieure une ouverture de 40 centimètres de diamètre doit permettre la récupération des échantillons du sol de l'astéroïde[3],[6].
La propulsion
Hayabusa est dotée de deux systèmes de propulsion[3],[6] :
- pour les manœuvres orbitales ou de changement d'orientation qui nécessitent d'être exécutées rapidement, la sonde est dotée de 12 petits moteurs-fusées chimiques (RCS) fournissant individuellement 22 N de poussée (2,2 kg). Les moteurs-fusées utilisent du peroxyde d'azote et de l'hydrazine qui constituent des ergols hypergoliques habituels pour des missions de longue durée. Les tuyères sont réparties sur les angles du parallélépipède pour pouvoir réaliser avec efficacité tous les types de correction. L'impulsion spécifique est de 290 secondes ;
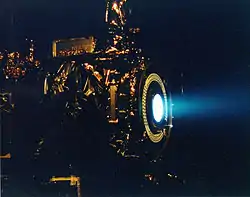
- la propulsion principale de la sonde est assurée par quatre moteurs ioniques µ10 japonais (IES) éjectant du xénon et dont le développement a débuté il y a 15 ans[7]. Ils sont utilisés durant les phases de croisière qui ne nécessitent pas de fortes accélérations. Sur ce type de moteur, le xénon est ionisé par induction HF, puis les ions sont accélérés dans un champ électrique puissant créé grâce à l'énergie fournie par les panneaux solaires. Les ions sont éjectés à travers des tuyères regroupées sur la même face de la sonde spatiale. La poussée maximale d'un moteur est de 4,8 millinewtons (soit 0,48 grammes) et utilise une énergie électrique de 1 kW. La poussée est très faible mais le rendement est nettement plus élevé que celui d'un moteur-fusée chimique grâce à la grande vitesse d'éjection permettant de limiter l'emport de carburant : l'impulsion spécifique est de 3200 secondes soit un rendement 11 fois plus élevé que celui des propulseurs chimiques également utilisés par la sonde. Ce type de moteur fonctionne sur de longues durées, ce qui permet d'obtenir des accélérations significatives. Un moteur ionique comporte trois composants : la source d'ions, la partie accélératrice et le système de neutralisation. Les moteurs de Hayabusa sont conçus de manière à pouvoir combiner le système de neutralisation d'un moteur avec la source d'ions d'un autre moteur pour faire face à la panne de l'un de ces deux composants. La mission peut être accomplie avec seulement deux moteurs opérationnels[8].
Les instruments scientifiques
Outre le système de prélèvement d'échantillons, plusieurs instruments scientifiques équipent la sonde dont certains sont utilisés pour la navigation[4].
| Équipement | Description et objectifs [9] |
|---|---|
| Asteroid Multiband Imaging CAmera (AMICA) | Cette caméra dotée d'un objectif télescopique avec un angle de vision de 5,7° a un usage mixte (appelée ONC-T pour la navigation) : sur le plan scientifique elle est utilisée pour faire de l'imagerie ainsi que des mesures de polarimétrie (4 polariseurs) et de spectroscopie (7 filtres passe-bande)[10].
|
| X-Ray Fluorescence Spectrometer (XRS) | Ce spectromètre a été conçu pour étudier les rayons X émis par l'astéroïde. Il permettra d'en identifier les constituants chimiques principaux. Avec son angle de vision de 3,5° sa résolution va de 160 eV à 5,9 keV[11].
|
| Near-IR Spectrometer (NIRS) | Cet appareil fonctionne dans le proche infrarouge (longueurs d'onde de 800 à 2500 nm). Il peut détecter les différents matériaux qui composent la surface de l'astéroïde. Avec son angle de vision de 0,1° la résolution obtenue est comprise entre 6 et 90 mètres par pixel[12].
|
Les équipements utilisés pour la navigation
Les manœuvres à proximité de l'astéroïde nécessitent d'avoir recours à plusieurs instruments combinant optique et ondes radio.
| Équipement | Description |
|---|---|
| Optical Navigation Camera (ONC) et Light Detection And Ranging (LIDAR) | Cet équipement a un usage mixte : pour la navigation, lors du processus d'approche de l'astéroïde, il permet de calculer une position relative à un astéroïde (ou à un corps céleste en général) en utilisant la détection et la télémétrie par la lumière avec l'altimètre laser LIDAR qui permet une précision d'un mètre à une distance de 50 mètres[13].
|
| Fan Beam Sensor (FBS) | Ce capteur de faisceau électromagnétique permet de détecter la présence d'obstacles sur le site d'atterrissage de la sonde. |
| Laser Range Finder (LRF) | Durant la descente vers l'astéroïde, quatre faisceaux laser sont émis de manière légèrement oblique depuis la face tournée vers le sol. Ils permettent à la sonde de vérifier que son orientation est correcte et que le cornet utilisé pour la collecte est correctement orienté, c'est-à-dire perpendiculaire par rapport au sol. |
| Star Tracker (STT) | Cet instrument permet de déterminer avec précision l'orientation de la sonde dans l'espace, en observant et en identifiant la position des étoiles. Il permet de maintenir notamment le pointage de l'antenne de télécommunications vers la Terre. Il est composé de deux parties : une partie optique située au sommet de l'antenne parabolique et un calculateur. |
La procédure d'atterrissage et de récupération d'échantillon
Pour atterrir sur l'astéroïde, la sonde doit faire face à de nombreuses contraintes[14] :
- l'astéroïde Itokawa, du fait de sa petite taille, a une gravité très faible. Il s'agit donc moins de réaliser une manœuvre d'atterrissage qu'une opération de rendez-vous spatial avec un objet en déplacement constant et aux formes irrégulières. Du fait de l'extrême faiblesse de la gravité, aucune force ne peut être exercée sur le sol par un instrument, tel qu'une foreuse, sans engendrer en retour une force qui ferait décoller la sonde ;
- la nature du sol n'est pas connue au moment de la construction de la sonde : la technique mise en œuvre pour l'atterrissage a dû être développée sans savoir si sa surface est faite de roche dure ou de poussière molle ;
- l'orientation de la sonde doit satisfaire deux contraintes. Les panneaux solaires de la sonde sont fixes et l'incidence du Soleil sur les panneaux ne doit pas être inférieure à 60° pour fournir suffisamment d'énergie. Mais par ailleurs le système de prélèvement retenu nécessite que les panneaux solaires soient parallèles au sol au moment de l'atterrissage ;
- le terrain d'atterrissage ne doit pas comporter d'obstacles d'une hauteur supérieure à 50 cm sous peine d'endommager les panneaux solaires ;
- malgré les reconnaissances effectuées auparavant, le relief et la topologie du terrain ne sont pas connus de manière détaillée avant la descente ;
- le pilotage de l'atterrissage ne peut se faire depuis la Terre car le temps de communication aller-retour est de 32 minutes et le débit est relativement faible (8 ko/s). La sonde doit pouvoir prendre des décisions de manière autonome en fonction de toutes les contraintes énumérées.
Le déroulement de l'atterrissage est piloté par des logiciels de guidage et de navigation complexes et plusieurs instruments fournissent des indications sur la position de la sonde par rapport au sol. La descente se déroule en trois étapes[14] :
- le site d'atterrissage a été déterminé à l'avance. La phase de descente débute à 3 ou 4 km au-dessus de l'astéroïde. La sonde doit descendre en se maintenant sur un axe proche de la droite qui joint le Soleil et l'astéroïde pour que les panneaux solaires soient suffisamment éclairés. Durant cette phase, la sonde utilise pour sa navigation des points remarquables identifiés auparavant à la surface de l'astéroïde. La trajectoire doit prendre en compte la lente rotation du petit corps céleste qui tourne sur lui-même en un peu plus de 12 heures. C'est à 500 mètres d'altitude que la décision de continuer est prise, à l'aide de l'image obtenue depuis cette position ;
- la phase de descente finale commence à 400 mètres. La vitesse de descente est réduite à 0,1 m/s. La sonde doit parvenir à se synchroniser durant cette phase avec la rotation de l'astéroïde de manière à rester en permanence au-dessus du site d'atterrissage retenu. À 30 mètres d'altitude, un marqueur d'objectif sphérique est largué : lorsqu'il sera au sol, il devra servir de repère fixe à la sonde pour stabiliser sa vitesse horizontale. Pour que le marqueur d'objectif ne rebondisse pas sur le sol, il est constitué d'une enveloppe rigide dans laquelle se trouvent de nombreuses petites billes qui absorbent l'énergie dégagée par la collision avec le sol. Lorsque le marqueur est parvenu jusqu'au sol, il est recherché par le télescope qui utilise des flashs pour l'identifier grâce à la surface réfléchissante qui le recouvre ;
- la phase d'atterrissage commence à 17 mètres d'altitude. La sonde doit maintenant descendre en maintenant sa face tournée vers le sol parallèle à celle-ci. Pour cela, elle utilise les quatre faisceaux laser LRF qui lui permettent de mesurer sa distance par rapport à quatre points au sol et à modifier son orientation pour être parallèle à ce plan (virtuel) ainsi défini. Au cours de cette phase, l'instrument FBS signale à la sonde la présence de tout obstacle latéral. La fin de la descente se fait en chute libre, à une vitesse de quelques centimètres par seconde, sous la seule influence de la gravité de l'astéroïde qui est de l'ordre de 1/100 000 de celle de la Terre. Lorsque le cornet utilisé pour le prélèvement entre en contact avec le sol, un projectile de 10 grammes est tiré à travers son ouverture à une vitesse de 300 m/s. L'impact sur la surface provoque l'éjection de fragments et de poussières qui sont collectés par le cornet puis transférés dans une capsule[15]. Les scientifiques espèrent récupérer par cette méthode quelques grammes du sol, en provenance de trois sites de prélèvement différents. Le temps de contact sur l'astéroïde est d'environ une seconde par prélèvement. La sonde reprend de l'altitude immédiatement après. Cette méthode de prélèvement d'échantillons est à l'origine du surnom donné à la sonde : en effet, un faucon (Hayabusa) plonge sur sa proie, l'attrape dans ses serres et reprend son envol sans atterrir[3],[N 1].
Le mini-atterrisseur Minerva
_sampling.jpg.webp)
Il était initialement prévu que la NASA fournisse un petit rover, qui devait être déposé sur l'astéroïde afin d'en étudier la surface. Ce projet fut cependant annulé à la suite de restrictions du budget spatial américain. Un autre micro-robot appelé Minerva (acronyme de MIcro/Nano Experimental Robot Vehicle for Asteroid) fut développé par la JAXA, pour être lâché sur l'astéroïde afin d'en étudier la surface.
Il se présentait sous la forme d'un hexadécagone (un polygone à 16 côtés) de 120 millimètres de diamètre pour 100 mm de haut pour une masse de seulement 591 grammes. Son alimentation électrique était assurée par plusieurs petits panneaux solaires qui recouvraient sa surface. Toutes les opérations effectuées sur Itokawa devaient tenir compte de la gravité extrêmement faible régnant autour de celui-ci. Puisque se mouvoir sur des roues à la surface d'un corps nécessite un minimum de gravité, un autre mode de déplacement dut être développé : le robot fut conçu pour se déplacer en bondissant, avec une vitesse maximale de 9 cm/s. Minerva devait calculer chaque bond avec précision pour éviter, soit de « flotter » au-dessus du sol d'Itokawa, soit de se mettre en orbite autour de celui-ci.
Le mini-robot Minerva était équipé de trois caméras CCD, dont deux étaient utilisées ensemble pour générer une représentation tridimensionnelle de la surface d'Itokawa. La mise au point se faisait à une distance comprise entre 10 et 50 cm. La troisième caméra permettait d'obtenir des images de cibles plus éloignées. Minerva embarquait également six capteurs thermiques. La sonde Hayabusa servait de relais vers la Terre pour la transmission des données recueillies par Minerva.
Développement et lancement (1995-2003)
Entre 1987 et 1994, des groupes de travail réunissant des spécialistes de l'ISAS (ancienne agence spatiale japonaise à vocation scientifique absorbée par la suite par la JAXA) et de la NASA étudièrent différentes missions, dont un projet de rendez-vous avec un astéroïde qui deviendra la mission NEAR Shoemaker, et un projet de retour d'échantillon de comète qui deviendra la mission Stardust. En 1995, l'ISAS choisit de financer une mission de retour d'échantillon d'un astéroïde. La NASA, qui devait initialement participer au projet, y renonça finalement pour des raisons financières. La sonde spatiale japonaise devait initialement être lancée en juillet 2002 vers l'astéroïde (4660) Nérée, mais une défaillance du lanceur M-V au cours d'un lancement en entraîna le report du tir. L'objectif initial désormais hors de portée, il fut remplacé par l'astéroïde 1998 SF36, qui fut à cette occasion rebaptisé en l'honneur d'un pionnier de l'astronautique japonaise, Hideo Itokawa[15]. Après un dernier report de quelques mois pour des raisons techniques, le lancement fut finalement planifié pour . Le coût de la sonde Hayabusa est estimé à 12 milliards de yens (environ 120 millions d'euros). Hayabusa est le troisième engin du programme spatial MUSES (Mu Space Engineering Satellites) destiné à tester de nouvelles techniques spatiales, qui comporte également la sonde lunaire Hiten (MUSES-A), lancée en 1990, et le radiotélescope spatial HALCA (MUSES-B), lancé en 1997.
Déroulement de la mission
La sonde Hayabusa est lancée le par une fusée M-V à propergols solides tirée depuis le Centre spatial de Uchinoura au Japon. Comme il est de tradition dans l'astronautique japonaise, la sonde, qui portait jusque-là l'appellation MUSES-C[N 2] est, à la suite de son lancement réussi, rebaptisée Hayabusa, c'est-à-dire faucon pèlerin[4].
En route vers l'astéroïde Itokawa (2003-2005)
Le nouvel objectif choisi après le report du lancement nécessite plus de puissance pour être atteint. Le lanceur M-V ne disposant d'aucune marge de puissance, l'équipe de la JAXA choisit de faire parcourir une orbite autour du Soleil par la sonde au cours de laquelle Hayabusa acquiert de la vitesse grâce à ses moteurs ioniques puis d'utiliser la Terre comme « tremplin » pour parvenir au rendez-vous avec l'astéroïde[16].
Un premier essai des moteurs ioniques est effectué : ceux-ci sont utilisés sans interruption entre le et mi-. Fin 2003, une tempête solaire endommage les panneaux solaires. La perte de puissance électrique disponible réduit la poussée maximale des moteurs ioniques, ce qui entraîne un report du rendez-vous avec l'astéroïde de plusieurs mois. L'arrivée doit désormais avoir lieu en septembre 2005 alors que le retour vers la Terre est planifié, pour des raisons de mécanique spatiale, en [3].
Alors que la sonde est sur le point d'achever sa première orbite autour du Soleil, ses moteurs ioniques lui ont permis de gagner 700 m/s en consommant 10 kg de xénon[6]. Le , la sonde survole la Terre à une altitude de 3 725 km pour une manœuvre d'assistance gravitationnelle qui la place sur une nouvelle orbite elliptique la menant vers son rendez-vous avec Itokawa tout en lui procurant un gain de vitesse de 4 km/s dans le référentiel héliocentrique[6]. Lors de son passage à proximité de la Terre, Hayabusa teste son système de navigation optique (ONC et LIDAR), qui doit lui permettre de calculer sa position relative par rapport à un corps céleste.
Jusqu'à son arrivée à proximité de l'astéroïde, les moteurs ioniques sont utilisés en permanence avec des interruptions de 3 jours par mois destinées à recalculer sa position. Les moteurs chimiques sont sollicités lorsqu'il faut effectuer des corrections rapides, c'est-à-dire au moment du survol de la Terre et à l'approche de l'astéroïde[4]. Le nombre de moteurs ioniques utilisés est adapté à la distance du Soleil qui fixe la puissance électrique disponible. En , alors que la sonde Hayabusa atteint le point de son orbite le plus éloigné du Soleil (1,7 UA), seul un moteur fonctionne. Le , une des trois roues de réaction qui maintient l'orientation de la sonde tombe en panne.
Approche et étude à distance (septembre 2005 - octobre 2005)
La sonde atteint son objectif le , en ayant consommé en tout 22 kg de xénon, qui lui ont permis de gagner 1 400 m/s depuis son départ. Le temps de fonctionnement cumulé des quatre moteurs ioniques est alors de 25 800 heures[6]. Une fois sur place, Hayabusa se place sur une orbite héliocentrique en restant à proximité de l'astéroïde. Hayabusa se maintient d'abord à 20 km de l'astéroïde (Gate position) ce qui lui permet d'effectuer de nombreuses observations scientifiques dont des mesures du champ gravitationnel et les relevés topographiques. Ces informations, qui remplissent des objectifs scientifiques, vont également être utilisées pour repérer les sites permettant d'effectuer les prélèvements d'échantillons. Le , la JAXA publie une première photo en couleur de l'astéroïde.
Début octobre, la sonde se place à une distance de 7 km (Home position) pour effectuer des observations à distance rapprochée, notamment la sélection des sites d'atterrissage. Le , la sonde perd une deuxième roue de réaction, l'obligeant à utiliser ses propulseurs chimiques pour contrôler son orientation. Cette défaillance entraîne la réduction du nombre de tentatives de prélèvements d'échantillon de 3 à 2, pour limiter la consommation des carburants des propulseurs chimiques. Cependant, selon la JAXA, la phase de cartographie n'est pas touchée par cette défaillance car elle est pratiquement achevée au moment de la panne.
Le , la sonde se rapproche à 3 km pour effectuer ses tentatives de descente sur le sol d'Itokawa. En raison de la distance entre l'astéroïde et la Terre, il est impossible pour les contrôleurs de la mission de piloter la sonde en temps réel. Ils peuvent cependant ordonner de suspendre la descente en cas de détection d'une anomalie. C'est ce qui se produit au cours de la tentative du , à la suite de la détection d'une erreur dans le système de navigation optique de la sonde, alors que Hayabusa se trouve à environ 1 km de la surface. La JAXA préfère annuler la descente pour éviter de mettre en péril la sonde. L'équipe responsable de la mission Hayabusa relativise la gravité de la défaillance, qui est due selon elle, à la complexité de la surface d'Itokawa.
Échec de l'envoi de Minerva (novembre 2005)
Le , la sonde descend jusqu'à 70 m de la surface pour tester l'altimètre laser et le système de navigation à proximité de la surface. Après avoir repris de l'altitude puis être redescendue à une altitude de 500 m, Hayabusa largue dans l'espace un réflecteur utilisé pour l'atterrissage. Les opérations de repérage de la cible menées permettent de vérifier la capacité de la sonde à la détecter. À partir des images prises à courte distance de la surface, un des deux sites présélectionnés est éliminé : il est prévu que la sonde se pose dans le lieu baptisé Mer Muses.
Le , Hayabusa effectue une nouvelle répétition générale de sa descente. La sonde doit descendre d'une altitude de 1,3 km jusqu'à 55 m du sol, à une vitesse de 3 cm/s avant de remonter. L'atterrisseur Minerva doit être largué à la fin de la phase de la descente pour poursuivre la descente sur la lancée jusqu'au sol. Cette fois-ci, tous les paramètres sont corrects, mais le largage du micro-robot Minerva a lieu alors que la sonde a déjà entamé sa trajectoire de remontée. Ce dernier est probablement parti à la dérive dans l'espace. Malgré cette perte, la répétition de la descente s'est déroulée correctement et les tentatives de prélèvement d'échantillons sont planifiées pour les 19 et .
Atterrissage non contrôlé d'Hayabusa
Le , la première tentative de prélèvement d'échantillons a lieu. À environ 40 m au-dessus de l'astéroïde, un réflecteur de 10 cm de diamètre est envoyé sur le sol d'Itokawa puis la vitesse de la sonde est réduite de 12 cm/s à 3 cm/s pour permettre au réflecteur, qui va servir à estimer la vitesse de la sonde par rapport au sol, de se poser avant la sonde. À environ 17 m d'altitude, alors que la sonde a annulé sa vitesse et est entraînée par la seule gravité de l'astéroïde, les communications sont interrompues car l'antenne à haut gain n'est plus alignée vers la Terre à cause d'un changement d'orientation d'Hayabusa qui a voulu éviter un obstacle détecté par un capteur. Au même moment s'effectue sur Terre le changement de station de réception qui passe de Goldstone (en Californie) à Usuda au Japon, entraînant la perte des données transmises par la sonde. La sonde continue néanmoins à descendre lentement, pour finalement toucher le sol d'Itokawa à 20h40 TU, à une vitesse de 10 cm/s avant de rebondir une première fois et de reprendre contact avec le sol à 21h10 puis à 21h30 TU, où elle se stabilise à 30 m du réflecteur.
La sonde n'a pu effectuer son prélèvement, il semble qu'elle se soit posée de travers sur la tranche des panneaux solaires. Après un séjour d'environ 30 minutes sur le sol d'Itokawa, elle reçoit un signal commandant l'interruption de la mission qui avait été transmis par le centre de contrôle de la JAXA lors de la perte de communication. La sonde s'écarte alors de l'astéroïde, puis stationne à environ 100 km d'Itokawa.
Seconde tentative de prélèvement
Le repère étant en place, une nouvelle tentative de prélèvement est effectuée comme prévu le . À 20h10 TU, la sonde interrompt ses communications pour effectuer une modification de son orientation pour préparer son contact avec le sol. À 20h16 TU, la communication reprend, et à 20h20 TU, la sonde indique qu'elle est en train de remonter. L'analyse de la télémétrie semble indiquer qu'elle a effectué un prélèvement et que deux projectiles ont été tirés. La sonde a l'air en bon état, mis à part certains de ses propulseurs, qui ne semblent pas fonctionner correctement. L'équipe d'Hayabusa effectue des tests pour identifier le problème, qui pourrait avoir pour origine un choc au cours de l'atterrissage non contrôlé du . Début décembre, la JAXA modifie son analyse du déroulement de l'atterrissage : il semblerait qu'aucun projectile n'ait été tiré sur le sol de l'astéroïde. Par conséquent, il est probable que le cornet de prélèvement n'ait rien collecté.
Le retour vers la Terre (2007-2010)
Après avoir passé plusieurs mois à étudier Itokawa, il était prévu que la sonde s'éloigne de l'astéroïde dans la première moitié du mois de , afin de revenir vers la Terre, qu'elle aurait ainsi atteint durant l'été 2007. Mais cette fenêtre de départ ne peut être respectée : une fuite de carburant survenue le modifie l'orientation de la sonde ce qui désaligne l'antenne normalement tournée vers la Terre et entraîne l'interruption des communications avec les contrôleurs de la mission[17]. La Jaxa parvient début 2006 à restaurer les communications et à stabiliser la sonde. Les propulseurs chimiques ont perdu tout leur carburant et 4 des 11 éléments lithium-ion sont hors service. Il subsiste toutefois suffisamment de xénon pour fournir les 2,2 km/s nécessaires pour revenir vers la Terre. Le plan de mission est modifié pour permettre un retour de la sonde sur Terre à l'été 2010[18]. Conformément à ce nouveau plan de vol, la sonde entame son voyage de retour en . La propulsion ionique fonctionne en continu jusqu'en , générant un gain de vitesse de 1 700 m/s. À cette date, les moteurs ioniques sont éteints et la sonde est mise en hibernation : elle poursuit désormais sa trajectoire en vol balistique. Durant la phase propulsée elle était stabilisée sur 3 axes mais dans cette nouvelle phase elle est mise en rotation de manière à avoir ses panneaux solaires constamment tournés vers le Soleil[19].
Le , la sonde est réveillée. L'équipe de la mission a mis au point une technique pour contrôler l'orientation de Hayabusa en l'absence de deux des roues de réaction. La solution utilise la capacité des moteurs ioniques à orienter leur poussée de quelques degrés et la pression de radiation exercée par les photons sur les panneaux solaires. Hayabusa peut être réorientée puis les moteurs ioniques sont remis en marche[8].
Un troisième moteur ionique tombe en panne en . Hayabusa a déjà vu sa vitesse croître de 2 km/s depuis son rendez-vous avec l'astéroïde. Le dernier propulseur en état de marche ne permettant pas de ramener seule la sonde, les ingénieurs de la JAXA parviennent à combiner les composants de deux propulseurs défectueux pour en former un nouveau en état de marche afin de fournir les 200 m/s restants[20],[21].
La rentrée atmosphérique ()

Le , vers 14 h TU, la capsule, qui est attachée sur la sonde à côté du cornet utilisé pour le prélèvement, effectue son retour sur Terre. Elle se sépare du corps principal de la sonde alors que celle-ci se trouve encore à plus de 200 000 kilomètres de la Terre.
La capsule, qui a la forme d'une soucoupe, mesure 40 cm de diamètre et 25 cm de hauteur pour une masse d'environ 17 kg. L'extrémité orientée vers l'avant durant la rentrée atmosphérique est recouverte d'un bouclier thermique ablatif de 3 centimètres d'épaisseur, pour protéger son contenu de la chaleur (près de 3 000 °C) générée par sa vitesse de rentrée de 12 km/s dans l'atmosphère terrestre. Parvenue à une altitude d'environ 10 km, la capsule, qui est passée sous la vitesse du son, largue le bouclier et la coque arrière puis déploie un parachute pour permettre un atterrissage en douceur. L'antenne de la balise qui doit faciliter le repérage par les équipes au sol est déployée.
La trajectoire de la sonde a été calculée de manière que la capsule atterrisse sur le terrain d'essais militaires de Woomera en Australie[2],[22]. Le reste de la sonde effectue également une rentrée atmosphérique mais, en l'absence de protection thermique, est détruit.
La rentrée atmosphérique s'est déroulée comme prévu, et la capsule est repérée par les équipes de la JAXA peu après son atterrissage[23]. Elle est rapatriée dans les laboratoires de l'agence spatiale au Japon, où son contenu éventuel est analysé.
Le , la Jaxa annonce que de « minuscules particules » ont été détectées dans le conteneur de la capsule. Toutefois, il reste à déterminer si le matériel recueilli est d'origine terrestre ou extraterrestre[24]. Le , l’agence japonaise confirme l’origine extraterrestre des particules récoltées par Hayabusa. Leur analyse chimique exclut une contamination terrestre. Le prélèvement d’échantillons sur Itokawa a donc réussi[25]. Le Japon devient ainsi le premier pays à s’être posé sur un astéroïde et en avoir rapporté des échantillons sur Terre.
Résultats de la mission
Résultats scientifiques
Les mesures effectuées depuis le sol avaient permis de connaître avec précision certaines des caractéristiques d'Itokawa. Les données transmises par la sonde ont permis de préciser ses dimensions (535x294x209 mètres), sa période de rotation avec une décimale supplémentaire (13,1324 heures) et l'orientation de son axe de rotation qui est pratiquement perpendiculaire à l'écliptique. Les mesures effectuées avec les spectromètres ont montré que les matériaux en surface ont une composition identique à ceux d'une chondrite dont la densité est normalement d'environ 3,2 grammes/cm3. La densité mesurée par la sonde spatiale est de 1,9 g/cm3, ce qui indique une porosité de 40 % : l'astéroïde comprend donc de grandes lacunes. L'explication proposée par les scientifiques japonais est qu'Itokawa soit un empilement de corps plus petits, résultant par exemple de l'éclatement d'un astéroïde de grande taille à la suite d'une collision[1],[4].
Les photos prises par la sonde en avec une résolution inférieure à 1 mètre montrent un objet de forme patatoïde, qui résulte sans doute du rapprochement entre deux astéroïdes de plus petite taille auxquels les scientifiques japonais ont donné l'appellation de « tête » et de « corps ». La surface de l'astéroïde comprend deux types de terrain. Des zones à la topographie tourmentée, du fait de la présence de nombreux débris rocheux atteignant une taille maximale de 50 mètres, et des régions au relief adouci, composées essentiellement de plaines de régolithe. Le modèle tridimensionnel de l'astéroïde développé à partir des mesures effectuées montre que le potentiel de gravité est à son maximum aux extrémités de l'astéroïde, et à son minimum à la jonction entre la tête et le corps. Or les régions de potentiel minimum sont fortement corrélées avec la présence de régolithe, ce qui suggère que celui-ci se soit accumulé à ces endroits dans le cadre de mouvements sismiques provoqués par les impacts sur l'astéroïde[1].
Contrairement aux astéroïdes observés par les autres sondes spatiales, comme (433) Éros et (243) Ida, la surface est pratiquement dépourvue de cratères. Il s'agit sans doute d'une caractéristique liée à la très petite taille de l'astéroïde, mais les mécanismes physiques en jeu ne sont pas identifiés[5].
L'analyse des échantillons de sol
Pour la première fois, les laboratoires sur Terre disposaient d'échantillons du sol d'un astéroïde. 1500 grains d'une taille généralement inférieure à 10 micromètres ont été trouvés dans l'un des deux compartiments de la capsule utilisée pour ramener l'échantillon du sol de la comète sur Terre[26]. En , six articles scientifiques portant sur les résultats de l'analyse des échantillons sont publiés[27]. L'analyse au microscope électronique des échantillons a confirmé que les météorites les plus courantes sur Terre, les chondrites ordinaires, proviennent des astéroïdes de type S tel qu'Itokawa. Le réceptacle contenait 1543 particules, dont la taille était comprise entre 3 et 40 micromètres et dont les deux tiers étaient composés d'olivine, de pyroxènes ou de feldspaths, tandis que le tiers restant était formé de silicates ou d'assemblages métalliques. La spectroscopie aux rayons X a confirmé que la composition chimique des particules et leur structure étaient analogues à celle des chondrites. Des différences existent, mais elles sont attribuables à l'érosion spatiale subie par les particules. Les cristaux de surface de la majorité des particules ont subi des chocs importants, ce qui permet d'avancer qu'Itokawa soit le résultat de la fragmentation d'un astéroïde d'une taille plus importante, à la suite de multiples chocs, puis d'un réassemblage de certains de ses morceaux[28].
Résultats techniques
Dans leur ensemble, les systèmes expérimentés par la sonde se sont comportés de manière conforme aux attentes. Cependant, certains composants des moteurs ioniques ont connu des défaillances, et des modifications sont dès à présent prévues pour les prochaines missions. Pour pallier la panne des roues de réaction, dont l'origine n'est pas connue, une roue de secours sera prévue sur les futures sondes spatiales. Enfin, le système de guidage et de navigation à proximité de l'astéroïde fait l'objet d'investigations qui n'étaient pas achevées début 2010[1].
Notes et références
Notes
- La sonde Rosetta, qui doit également prélever un échantillon sur un objet ayant une gravité aussi faible, met en œuvre simultanément plusieurs dispositifs destinés à la plaquer au sol (ancre, moteurs, etc.).
- MUSES-C signifie « Mu Space Engineering Spacecraft », c'est-à-dire « démonstrateur technologique lancé par une fusée M ». La lettre C indique qu'il s'agit du troisième engin spatial de ce type : A désignait la première sonde lunaire japonaise Hiten et B le télescope spatial HALCA.
Références
- (en) M. Yoshikawa1, J. Kawaguchi1, et H. Yano (JAXA), « ASTEROID SAMPLE RETURN MISSION HAYABUSA, ITS ENGINEERING CHALLENGES AND SCIENTIFIC RESULTS. » [PDF], 41st Lunar and Planetary Science Conference,
- (en) « Press kit Hayabusa », JAXA,
- (en) Hitoshi Kuninaka *, Kazutaka Nishiyama†, Ikko Funakai‡, Tetsuya§, Yukio Shimizu, et Jun’ichiro Kawaguchi, « Hayabusa »,
- (en) M. Yoshikawa, A. Fujiwara, J. Kawaguchi (JAXA), « Hayabusa's Adventure around a Tiny Asteroid Itokawa »,
- (en) Charles Q. Choi, « What We Don't Know About Asteroids », space.com,
- (en) « Asteroid Rendezvous of HAYABUSA ExplorerUsing Microwave Discharge Ion Engines », NASA National Space Science Center,
- (en) Hitoshi Kuninaka (ISAS), « High hopes for the age of Epic Space voyages », JAXA,
- (en) Emily Lakdawalla, « Six days left for Hayabusa: A recap of the mission », The planetary society,
- (en) « Hayabusa Science Objectives », sur http://neo.jpl.nasa.gov, (consulté le )
- (en) « Hayabusa AMICA images for all mission phases. », sur http://starbrite.jpl.nasa.gov
- (en) « XRS (X-Ray fluorescence Spectometer », sur http://darts.isas.jaxa.jp
- (en) « Hayabusa NIRS raw spectra covering the entire mission from May 2003 through November 2005. », sur http://starbrite.jpl.nasa.gov
- (en) « Hayabusa LIDAR data for all mission phases. », sur http://starbrite.jpl.nasa.gov
- (en) Takashi Kubota (JSPEC/JAXA), Tatsuaki Hashimoto, Jun'ichiro Kawaguchi, Hajime Yano, Fuyuto Terui, Makoto Yoshikawa, Masashi Uo, Ken’ichi Shirakawa, « Guidance and Navigation Scheme for Hayabusa Asteroid Exploration and Sample Return Mission », The planetary society (consulté le )
- (en) A.J.S. Rayl, « Japan's Hayabusa [MUSES-C] Swings By Earth on Way to Asteroid Itokawa », The planetary society,
- (en) Junichiro Kawaguchi (ISAS), « Research Plan of the Asteroid Explorer Hayabusa », JAXA,
- (en) « Status of the Hayabusa », JAXA,
- (en) « Current Status of Hayabusa Spacecraft - Communication and Operation Resumption », JAXA,
- (en) Hitoshi Kuninaka, « Hayabusa Finished First Leg of Orbit Maneuver toward Earth », JAXA,
- (en) Hayabusa stumbles on the path back to Earth
- (en) Hayabusa's still coming home: JAXA engineers come up with yet another creative solution
- (en) Japanese spacecraft to land in Australia, publié le
- (en) Hitoshi Kuninaka, « Welcome back HAYABUSA to Earth after overcoming various difficulties! », JAXA,
- http://www.google.com/hostednews/afp/article/ALeqM5gDN2g3_6nFNVNrkS8gvokuyTyGig
- « Hayabusa a bien rapporté des morceaux d’astéroïde », sur cieletespace.fr, (consulté le ).
- (en) « Identification of origin of particles brought back by Hayabusa », JAXA,
- (en) « The “Science” special edition on “HAYABUSA” research reports was published », JAXA,
- Cécile Fourrage, « L'origine des chondrites », Pour la science,
Voir aussi
Bibliographie
- Description de la mission
- (en) Paolo Ulivi et David M Harland, Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, Springer Praxis, , 529 p. (ISBN 978-0-387-09627-8, lire en ligne)Description détaillée des missions (contexte, objectifs, description technique, déroulement, résultats) des sondes spatiales lancées entre 1997 et 2003.
- Ouvrages sur les astéroïdes
- (en) Michael K. Shepard, Asteroids : Relics of Ancient Time, Cambridge, Cambridge University Press, , 350 p. (ISBN 978-1-107-06144-6, lire en ligne)
- (en) Michael Moltenbrey, Dawn of Small Worlds : Dwarf Planets, Asteroids, Comets, Springer, , 275 p. (ISBN 978-3-319-23003-0, lire en ligne)
Articles connexes
Liens externes
- "Hayabusa, un petit tour et puis s'en va", La Méthode Scientifique, France Culture, 12 mars 2019
- (en) Toutes les dépêches de la JAXA sur Hayabusa depuis l'origine sur le site de la JAXA
- (en) Hayabusa's Adventure around a Tiny Asteroid Itokawa : une synthèse de la mission par une équipe de la JAXA
- (en) Asteroid sample return mission Hayabusa, its engineering challenges and scientific results Défis techniques et résultats scientifiques (JAXA, 2010)
- (en) presskit Hayabusa Présentation pour la presse réalisée pour l'arrivée de la sonde sur Terre (JAXA 2010)
- (en) Hayabusa sur le site de la NASA
- (en) Asteroid Rendezvous of HAYABUSA Explorer Using Microwave Discharge Ion Engines Article sur les moteurs ioniques de la sonde (JAXA 2005)
- (en) Hayabusa Planatery Society Article sur la sonde.
- (fr) Hayabusa - Muses-C Astrocosmos.net Article sur la sonde
- (fr) Hayabusa : pour une poignée de poussières (audio), les podcasts de Ciel & Espace radio, Patrick Michel
- (en) 【Miku Hatsune】Hayabusa the Falcon "はやぶさ"【VOCALOID Anime MV】 English Subs, une musique de Hatsune Miku sur l'histoire de la sonde Hayabusa, par Xenon Maiden, SHO, et toppe
 Portail du Japon
Portail du Japon  Portail de l’astronautique
Portail de l’astronautique  Portail de l’astronomie
Portail de l’astronomie  Portail des planètes mineures et comètes
Portail des planètes mineures et comètes