Luna 25
Luna 25 (en russe : Луна-25) ou précédemment Luna-Glob (russe: Луна-Глоб , « Globe Lunaire ») est un atterrisseur lunaire russe devant se poser en septembre 2022 à proximité du Pôle Sud lunaire. La mission sera lancée depuis le cosmodrome Vostotchny, en Extrême-Orient russe, par un lanceur Soyouz 2.1b équipé d'un étage supérieur Fregat-M. Après son lancement, Luna 25 deviendra la première sonde lunaire lancée par l'URSS/Russie depuis la mission de retour d'échantillons Luna 24, en 1976. Elle deviendra également le premier objet russe à se poser sur un autre corps que la Terre. Dédiée à la réalisation de diverses expériences et démonstrations technologiques, la mission devrait ouvrir la voie au lancement d'autres missions lunaires, plus ambitieuses, comme Luna 26, 27 ou 28.
Sonde spatiale
| Organisation |
|
|---|---|
| Constructeur |
|
| Programme | Programme Luna |
| Domaine | Étude du sol lunaire |
| Type de mission | Atterrisseur lunaire |
| Statut | En développement |
| Autres noms | Luna-Glob |
| Lancement | septembre 2022 |
| Lanceur | Soyouz 2.1b/Fregat-M |
| Durée de vie | 1 an |
| Site | lg.cosmos.ru |
| Masse au lancement | 1 750 kg |
|---|---|
| Masse instruments | ~20 à 30 kg |
| Propulsion | Chimique |
| Ergols | UDMH et Peroxyde d'Azote |
| Masse ergols | 975 kg |
| Source d'énergie | Panneaux solaires & RTG |
| Orbite | Orbite de transfert lunaire puis Orbite lunaire |
|---|---|
| Atterrissage | 13 octobre 2021 |
| Localisation | 69,545° Nord, 43,544° Est |
Historique et contexte
Première proposition (1997-2004)
_cropped.jpg.webp)
Luna 24, lancée en 1976, est la dernière mission spatiale de l'ère soviétique ayant eu pour objectif l'exploration de la Lune. Malgré une tentative avortée de lancer un ultime Lunokhod (mission Luna 25A), aucun autre projet lunaire soviétique ne verra le jour. Après l'éclatement de l'Union Soviétique au début des années 90, la jeune astronautique russe subit de plein fouet la crise économique qui s'ensuit et l'effondrement des programmes spatiaux dépendant du budget de l’État. Durant cette période de récession, la seule mission lunaire est proposée en 1997. Le projet consiste à placer à l'aide d'une fusée Molniya, ou une Soyouz U/Fregat alors en développement, un petit engin en orbite autour de la Lune. Celui-ci emporte trois pénétrateurs de 250 kg chacun qui sont largués et s'enfoncent sous la surface lunaire. Chacun de ces engins dispose d'un sismomètre et d'un instrument mesurant le flux de chaleur. L'énergie est fournie par des isotopes nucléaires. Les données fournies par les trois pénétrateurs permettent de détecter et localiser par relevé trigonométrique la source de l'activité sismique de la Lune. Au cours des années suivantes, les caractéristiques du projet subissent des modifications mais aucun budget ne lui est affecté. Le projet est rebaptisé Luna Glob (« Globe Lunaire ») allusion à la nature globale du réseau de sismomètres qui doit être mis en place[1].
Officialisation du projet (2005)
Au milieu de la décennie 2000, l'exploration de la Lune revient sur le devant de la scène spatiale internationale avec le développement d'orbiteurs par la Chine (Chang'e 1 lancé en 2007), l'Inde (Chandrayaan-1 2008) et le Japon (SELENE 2007). Les Etats-Unis lancent à la même époque le programme Constellation qui prévoit de ramener des hommes à la surface de la Lune vers 2020. Les responsables russes souhaitent maintenir leur présence dans un domaine où ils ont excellé par le passé. En , le responsable de l'institut Vernadsky GEOKhI, qui tente de trouver des fonds dans le cadre d'une coopération internationale, entame des discussions avec les responsables du projet japonais Lunar-A qui ont largement progressé dans la mise au point de pénétrateurs équipés de sismomètres mais ne disposent pas du budget nécessaire au lancement de leur engin spatial. Des discussions sont entamées pour fusionner les projets japonais et russe mais ne débouchent pas et le projet Lunar-A est abandonné en 2007[2],[3]. En 2006, les officiels de l'Agence spatiale russe de l'Institut Vernadsky GEOKhI et de l'Institut de physique de la Terre dévoilent le projet Luna Glob.
La mission, dont l'architecture a été définie par le constructeur des sondes spatiales soviétiques et russes Lavotchkine, repose sur un vaisseau-mère de 1500 kg environ qui embarque 10 pénétrateurs de 30 kg qui sont largués au-dessus de la Mer de la Fertilité et forment, après avoir pénétré dans le sol, deux cercles distincts d'un diamètre respectivement de 5 et 10 km avec un espacement de plusieurs kilomètres entre chaque engin. Le vaisseau mère doit ensuite larguer deux autres pénétrateurs plus lourds sur les sites d'atterrissage d'Apollo 11 et 12 pour reconstituer le réseau de stations sismiques mis en place en 1969 par la NASA. Enfin, un atterrisseur de 250 kg se détache du vaisseau mère pour se poser en douceur près du Pôle Sud. Cette station polaire emporte un sismomètre et deux spectromètres pour détecter la présence de glace d'eau. Le vaisseau mère sert de relais de communications entre les 13 stations lunaires mises en place et la Terre. En cas de succès de la mission, un rover de 700 kg doit être lancé vers 2015-2016 puis une mission de retour d'échantillons. Cette dernière reprend les principes d'architecture des missions soviétiques similaires des années 1970 tout en allégeant l'ensemble[1],[2].
Évolution des caractéristiques de la mission
Le programme spatial russe bénéficie de l'embellie économique du pays au milieu de la décennie 2000 et les officiels, après avoir annoncé en 2006 que Luna-Glob serait lancé en 2012, avancent la date en 2009. Les caractéristiques du projet ont été entre-temps revues à la baisse. La sonde spatiale lunaire a désormais une masse de 2 125 kg, comprend un orbiteur qui doit mener une mission scientifique de 3 ans et emporte 4 pénétrateurs. L'atterrisseur n'est plus à l'ordre du jour. Mais le développement des pénétrateurs eux-mêmes s'avère problématique. Des tests ont démontré que ceux-ci pouvaient résister à une vitesse maximale de percussion de la surface de 1,5 km/s or celle-ci est de 2,5 km/s. Il faudrait donc freiner les pénétrateurs mais les ingénieurs de Lavotchkine ne parviennent pas à mettre au point le système de freinage reposant sur une fusée à propergol solide et les pénétrateurs sont retirés du projet à une date antérieure à 2010. Un deuxième projet de mission robotique lunaire, baptisé Luna-Resours, s'est développé à compter de 2007 dans le cadre d'une collaboration avec l'Inde. Les deux projets convergent vers 2010 et reposent tous deux sur un atterrisseur développé par Lavotchkine. L'instrumentation principale de l'atterrisseur Luna-Glob (PsM) est centrée sur le prélèvement et l'analyse de carottes du sol effectués à l'aide d'une foreuse tandis que Luna-Resours transporte un rover développé par l'Inde[2].
Les répercussions de l'échec de Fobos-Grunt (2011)

Au début des années 2010, le calendrier de lancement des deux missions reste flou : les dates avancées se situent en 2012/2013 sans qu'on sache quelle mission est prioritaire sur l'autre. Fin 2010, la date de lancement de Luna-Glob est reculée à 2014 après celle de Luna-Resours. La sonde spatiale Luna-Glob comprend un orbiteur qui doit emporter 120 kilogrammes d'équipements scientifiques. L'orbiteur a une masse prévue de 1 630 kg tandis que celle de l'atterrisseur atteint 1 260 kg. La mission martienne Fobos-Grunt, développée par Lavotchkine et lancée en 2011, est un échec total qui met en évidence la perte de compétences de l'industrie russe dans le domaine de l'exploration spatiale ainsi que des problèmes d'organisation particulièrement aigus qui seront confirmés par des échecs ultérieurs. En conséquence, les lancements des missions lunaires Luna-Resours et Luna-Glob ne sont plus prévus avant 2016-2017. De plus, la participation indienne au projet est supprimée, et la mission ne décollera non pas sur GSLV Mk II comme envisagé, mais sur Soyouz 2.1b. En , les responsables décident de dédoubler la mission Luna-Glob en séparant l'orbiteur (qui doit voler en 2016) et l'atterrisseur prévu pour 2017. De plus, il sera décidé de revoir entièrement l'architecture de l'atterrisseur, qui était jusqu'alors basée sur celui de Fobos-Grunt[4].
Construction de la sonde spatiale
Début 2012, à la suite de l'échec de Fobos-Grunt, l'atterrisseur Lunar-Glob retourne à la phase de conception préliminaire. L'ordinateur embarqué qui reposait sur celui de Phobos-Grunt est abandonné et le système de télécommunications est revu à la lumière des défaillances de la mission martienne. À cette date, Lunar-Glob doit transporter une charge scientifique minimale, son objectif principal étant la mise au point des techniques d'atterrissage en douceur[5]. La précision attendue est de 30 kilomètres. La charge utile, initialement de 30 kilogrammes, est réduite à 17-19 kg pour faire face à des problèmes de dépassement de la masse à vide et comprend une quinzaine d'instruments scientifiques. Le projet prévoit à cette époque d'embarquer un bras télécommandé emportant certains des instruments et un générateur thermoélectrique à radioisotope développé par le centre de recherche nucléaire de Sarov qui vient s'ajouter aux panneaux solaires. Luna-Glob doit précéder la mission Luna-Resours beaucoup plus sophistiquée qui emportera 35 kg d'instrumentation scientifique. En 2016, le coût de l'atterrisseur Luna-Glob est évalué à 2,98 milliards de roubles[6],[7].
En 2014, les officiels russes annoncent que la mission sera lancée entre 2017 et 2019. La construction d'un prototype débute et une série de tests est planifiée en 2015. Le conflit de la Russie avec l'Ukraine en 2014 déclenche un embargo des nations occidentales sur les livraisons des composants électroniques qui nécessite de revoir les équipements électroniques et de télécommunications[8]. En , Lavotchkine annonce qu'il a achevé la construction d'un équipement destiné à simuler les conditions d'un atterrissage sur la Lune. À la fin de l'année, la fabrication des premiers composants du modèle de vol est lancée. C'est également à cette période que sera annoncé les sites d'atterrissages retenus. Le site principal visé est le cratère Bogouslavsky, mais Luna 25 pourra aussi se poser sur un site de réserve, le cratère Manzini. Ce choix a été réalisé en prenant en compte plusieurs facteurs, comme la proximité avec le Pôle Sud, l'intérêt scientifique des lieux, l'exposition au Soleil, ou encore l'inclinaison de la surface sur le site d'atterrissage, devant être inférieure à 10°[9].

Courant 2017, le constructeur révèle que l'atterrisseur a du mal à tenir le devis de masse et d'énergie. La mission qui devait être lancée depuis le cosmodrome Vostotchnyi doit désormais l'être depuis Baïkonour sans doute pour économiser les coûts de construction d'équipements dédiés à la préparation de la mission. Cette décision sera finalement revue, et la sonde partira bel-et-bien du nouveau cosmodrome russe. Le calendrier du projet qui prévoit désormais un lancement en 2019 est très serré et met celui-ci en concurrence avec les développements de Lavotchkine pour l'atterrisseur et le rover ExoMars, réalisé avec l'Agence spatiale européenne. Pour tenir le devis de masse, les responsables du projet décident de supprimer l'instrument Termo-L[10]. En 2018, les divers éléments de la sonde avançait au rythme prévu, sauf l'instrument appelé BIB, l'unité de mesure inertielle de la sonde. Fourni par la NPO IT, le BIB a une mission cruciale, à savoir récolter toutes les informations nécessaires pour que l'ordinateur de bord puisse guider l'atterrisseur lors de son voyage jusqu'à la surface lunaire. Constatant que l'instrument ne serait pas prêt à temps pour un lancement en 2019, NPO Lavotchkin tentera de le remplacer par un équivalent européen, dénommé ASTRIX, construit par Airbus. Toutefois, cet échange s'avèrera impossible en raison de la présence de plusieurs composants américains, soumis aux règles de l'ITAR[11]. Finalement, c'est un équivalent russe, BIUS-L, qui sera installé. Ce retard posera des problèmes à l'équipe suédoise, chargée de fournir l'instrument LINA-XSAN, qui approche de sa date de péremption. Il sera à terme décidé que l'instrument suédois ne volera pas sur Luna 25, mais sur la mission chinoise Chang'e 4. Le , Roscosmos déclare que le lancement de la sonde est prévu le [12]. De juillet à septembre 2021, Luna 25 passe des tests sous vide à Peresviett, chez le NITs RKP[13]. En février 2021, l'atterrisseur passe des essais vibratoires chez RKK Energiya[14]. En septembre 2021, l'agence TASS annonce que le décollage est reporté à mai 2022[15].
Déroulement de la mission

Luna 25 doit être placé en orbite par un lanceur Soyouz 2.1b/Fregat-M, tiré depuis le cosmodrome Vostotchnyi. Le lanceur placera la sonde, ainsi que d'autres CubeSats embarqués sur ce vol, en orbite basse terrestre, avant que l'étage Fregat ne manœuvre pour envoyer le tout en orbite de transfert lunaire après une courte phase de croisière. Seules quelques fenêtres de lancement sont possibles, la mission devant voyager avec un minimum de manœuvres de correction à réaliser, lors de configuration du système Terre-Lune particulières[11]. Le voyage vers notre satellite durera entre 4,5 et 5,5 jours, avant qu'elle ne s'insère en orbite lunaire polaire, à une altitude d'environ 100 kilomètres. La sonde y restera durant 5 jours, durant lesquels elle abaissera progressivement son orbite, pour réduire son périsélène à seulement 12 kilomètres d'altitude, au-dessus de son site d'atterrissage, avant de se poser à proximité du Pôle Sud (sur le site principal de Bogouslavsky ou le site de réserve de Manzini), pour une durée initiale d'un an[4]. La précision à l'atterrissage prévue est une ellipse de 30 km sur 15, et il n'est pas prévu que l'atterrisseur puisse de lui-même corriger sa trajectoire[16]. L'atterrisseur devrait toucher le sol à une vitesse comprise entre 1,5 m/s et 3 m/s. Luna 25 deviendra ainsi la première mission d'exploration spatiale soviético-russe lancée vers la Lune depuis 1976.
Les expériences et les communications avec la Terre seront réalisées lors des journées lunaires (qui durent 14,5 jours terrestres). Durant la nuit lunaire, un générateur thermoélectrique à radioisotope assurera l'alimentation en électricité de la sonde, afin qu'elle garde une température stable. Toutes les expériences sont alors désactivées.
Le lancement de la mission est prévu pour septembre 2022[17].
Objectifs de la mission
La mission primaire de Luna 25 n'est pas l'étude scientifique de la Lune, mais avant tout la démonstration technologique d'un atterrissage lunaire, et de divers autres éléments qui pourront être réutilisés sur de futures missions. Ainsi, les objectifs purement scientifiques sont classés en tant qu'objectifs secondaires[4]. Sur le plan technologique, les objectifs de la mission sont[18] :
- La validation de la technique d'atterrissage en douceur sur la surface lunaire
- La réalisation de divers essais de communication entre les régions polaires de la Lune et la Terre
- La validation du système de protection thermique de l'atterrisseur
- L'essai, et la validation du fonctionnement du bras télécommandé, devant analyser le régolithe lunaire
Les objectifs scientifiques majoritaires de la mission Luna 25 sont les suivants[18] :
- Déterminer les propriétés thermiques et mécaniques du régolithe dans les régions polaires
- Mesurer les caractéristiques infrarouge du régolithe polaire
- Effectuer des mesures de spectroscopie par claquage laser du régolithe polaire
- Déterminer le contenu en eau et la proportion des éléments chimiques présents dans le sol proche de la surface du régolithe polaire
- Déterminer les caractéristiques du plasma et de l'exosphère neutre au pôle
- Mesurer la présence de poussière au pôle
- Mesurer les variations thermiques du régolithe polaire
Le programme d'exploration lunaire russe
Luna 25 s'inscrit dans un programme d'exploration lunaire dont l'objectif final est de résoudre d'importantes questions scientifiques (origine et évolution de la Lune, caractéristiques des régions polaires, volatiles présents, exosphère et rayonnement) et de fournir les éléments indispensables (connaissances du terrain, ressources exploitables) aux futures missions avec équipage. Le programme d'exploration lunaire russe tel qu'il a été défini en 2016 prévoit des missions robotiques de complexité croissante tenant compte du niveau de maitrise technique des ingénieurs russes et des contraintes budgétaires. À terme, le programme doit permettre l'installation d'observatoire de l'espace profond et du système solaire et de laboratoires scientifiques. Pour remplir ces objectifs, les missions robotiques suivantes sont prévues (projection effectuée en 2016)[18] :
- l'atterrisseur Luna-Glob (Luna 25) est un engin spatial léger qui doit effectuer une première analyse du régolithe lunaire dans les régions polaires jusqu'à une profondeur de 50 centimètres et collecter des données sur l'exosphère. Il doit également valider les techniques d'atterrissage et les systèmes de télécommunications qui seront mis en œuvre par les missions lunaires suivantes ;
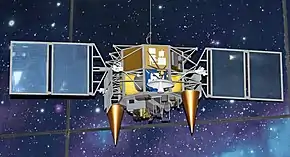
- l'orbiteur Luna Resours (Luna 26) doit être placé sur une orbite polaire de 100 km. Sa mission est de cartographier l'ensemble de la Lune, d'analyser l'exosphère et le plasma autour de la Lune, d'identifier des sites d'atterrissage dans les régions polaires et de servir de relais de télécommunications pour les missions au sol. Sa date de lancement est prévue vers 2020 ;
- l'atterrisseur Luna Resours (Luna 27) est un engin plus lourd qui doit atterrir également dans la région du pôle sud. Il doit effectuer une analyse du régolithe lunaire jusqu'à une profondeur de 2 mètres et collecter des données sur l'exosphère. Sur le plan technologique, il doit valider une technique d'atterrissage de haute précision permettant d'éviter les obstacles au sol. Il doit mettre en œuvre une foreuse capable de conserver la température des carottes de terrain prélevées. Sa date de lancement est prévue vers 2021 ;
- la mission retour d'échantillon Luna Grunt (Luna 28) a pour objectif de ramener sur Terre des échantillons du sol lunaire dont la température a été préservée.
Caractéristiques techniques
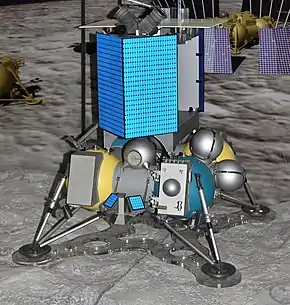
Luna 25 a une masse de 1 750 kg dont 975 kg d'ergols. Elle est divisée en deux parties, la section inférieure, comprenant l'ensemble propulsif, le bras manipulateur et quelques antennes, et la section supérieure, regroupant les systèmes embarqués et les expériences scientifiques[16].
L'atterrisseur dispose d'un système de caméras PILOT-D, fourni par l'Agence spatiale européenne, qui doivent fournir des images en temps réel durant l'atterrissage. Mais les européens annoncent le 13 avril 2022 leur retrait des missions spatiales russes à la suite de l'invasion de l'Ukraine par la Russie en 2022[19].
Atterrissage
L'atterrisseur dispose de quatre pieds, eux-mêmes composés d'un amortisseur, d'une entretoise de maintien en forme de V, et d'une structure porteuse principale. Ces pieds disposent de petits capteurs, permettant de couper automatiquement la propulsion de la sonde lorsque cette dernière touche le sol lunaire. Les amortisseurs sont capables d'encaisser un choc de 750 kg, et peuvent se rétracter sur 914 mm. Une fois au sol, la masse de Luna 25 enfonce naturellement les amortisseurs de 260 mm[20].
Propulsion
Luna 25 est équipée de divers moteurs à ergols liquides, utilisés lors des différentes phases de la mission :
- Un moteur dédié aux corrections de trajectoire et à l'insertion en orbite lunaire, d'une poussée de 4,7 kN, alimenté en carburant par une turbopompe
- Deux moteurs dédiés à l'atterrissage, ayant chacun une poussée de 588 N, alimentés en carburant par la pressurisation des réservoirs
- Plusieurs moteurs de stabilisation et d'orientation, composés de DMT1-8 (poussée de 5,8 N) et de DMT9-12 (poussée de 49 N), alimentés en carburant par la pressurisation des réservoirs. Ces petits moteurs peuvent aussi être utilisés à la place du moteur principal pour les corrections de vitesse inférieures à 15 m/s.
Régulation thermique

La régulation thermique de la sonde débute alors qu'elle est encore au cosmodrome Vostotchnyi, plusieurs semaines avant son décollage, lors de l'installation du générateur thermoélectrique à radioisotope (RTG) sur Luna 25. Ce système de régulation est composé de deux parties distinctes :
- D'une part, le RTG de la sonde, conçu pour alimenter tous les systèmes de l'engin grâce à l'énergie thermique produite par la désintégration d'éléments radioactifs. Il peut fonctionner en complément des panneaux solaires, ou être la seule source d'énergie lors des nuits lunaires. Durant ces dernières, sa mission principale est d'assurer l'alimentation électrique de l'horloge de bord, qui permet de réveiller la sonde et ses instruments après le début du jour lunaire. Ce RTG a une puissance électrique de 6,5 W, une tension de 3 V, et une puissance thermique allant de 125 W à 145 W.
- D'autre part, deux radiateurs thermiques, chargés d'évacuer efficacement la chaleur produite par les divers appareils embarqués, à l'aide de caloducs en aluminium remplis de propylène, couvrant une superficie totale de 0,7 m2 pour chaque panneau. Ces caloducs sont organisés en nid d'abeilles, facilitant l'évacuation de la chaleur dans le vide spatial[20].
Systèmes/instruments embarqués
Luna 25 est équipée d'un ordinateur central, dénommé BIVK-R, chargé de la prise de décision et de l'exécution du programme de vol. C'est également lui qui est chargé de gérer la réalisations des expériences, ou encore de réaliser des diagnostiques des systèmes de l'atterrisseur[20]. Plusieurs instruments et systèmes y sont directement reliés :
- Un adaptateur de communication, permettant le contrôle des antennes pour la communication avec la Terre
- Deux viseurs d'étoiles, permettant d'assurer la bonne orientation de la sonde pendant son voyage
- Un système de régulation de poussée, chargé d'adapter la poussée des différents ensembles propulsifs
- Une horloge embarquées, devant coordonné l'ensemble des actions effectuées par la sonde, et réveiller les systèmes de cette dernière après la nuit lunaire
- Deux capteurs solaires, fonctionnant à 347 K
- Un capteur Doppler, chargé de mesurer les vitesses et les distances de la sonde par rapport au sol lunaire
- Deux capteurs inertiels, chargés de stabiliser et d'orienter Luna 25 dans les différentes phases de sa mission
Alimentation électrique
Luna 25 est la première sonde spatiale à tenter un alunissage à d'aussi hautes latitudes lunaires. L'angle maximum du Soleil au-dessus de l'horizon n'est que de 16,3°, en sachant que l'atterrisseur peut se poser jusqu'à 10° sur le côté, ce qui pourrait limiter, ou augmenter son exposition. Si le site d'alunissage de secours est utilisé (cratère Manzani), alors le Soleil se s'élèvera plus que de 13°. Les panneaux solaires de l'engin ont donc été dimensionné en conséquent, eux qui fournissent la majeure partie de l'électricité de la sonde. Le système électrique de la sonde commence à fonctionner immédiatement après la séparation de l'étage Fregat. Il est composé des panneaux photovoltaïques, d'une batterie lithium-ion, d'une unité chargé de gérer informatiquement la répartition de l'énergie, et d'un RTG[20].
Cette batterie lithium-ion, dénommée 8LI-70, est en réalité composée de huit batteries LIGP-70 connectées en série, le tout devant pouvoir fournir 529 W de puissance lors de conditions d'orientation solaire optimales. Ces batteries se chargent avec un courant de 10 A et se déchargent en 25 A. L'électricité de ces dernières est fournie par cinq panneaux photovoltaïques arsenic-halogène, ayant une superficie totale de 4,515 m2. Quatre panneaux sont situées sur la section supérieure, autour de la plateforme contenant les divers équipements de Luna 25. Un cinquième panneau est déployé horizontalement après l'atterrissage, situé sur le côté des réservoirs de carburant de la sonde, sur la section inférieure[20].
Systèmes de communication
La communication avec l'atterrisseur est assurée via des antennes en bande radio X. Elles permettant notamment la réception, le décodage, et la transmission de commandes de la Terre à l'ordinateur de bord, l'exécution de diverses mesures avec les stations au sol, la réception d'informations télémétriques provenant des instruments et des capteurs pour les retransférer vers les stations sol. Luna 25 possède deux antennes de réception à faisceau bas, deux antennes d'émission à faisceau bas, et d'une antenne d'émission orientable, ainsi que de trois commutateurs. Le tout assure une communication avec la sonde à une portée comprise entre 200 km et 420 000 km. Luna 25 émet dans deux plages de fréquences, à savoir 7 145–7 235 MHz et 8 400–8 500 MHz, avec un débit de 4 mégabits/seconde[20].
Instruments scientifiques
La liste des instruments scientifiques devant équiper la sonde a été de nombreuses fois modifiées avant d'être définitivement fixée en 2016. Toutefois depuis cette date, deux changements majeurs ont eu lieu, à savoir la suppression de deux instruments. TERMO-L a été transféré de Luna 25 à Luna 27 en 2017, du fait de sa masse trop importante pour tenir les marges de la mission. De même, le détecteur d'ions suédois LUNA-XSAN a été transféré sur la mission Chang'e 4, qui s'est posée sur la face cachée de la Lune en 2019, du fait de la péremption prochaine de certains composants, rendant sa compatibilité avec Luna 25, maintes fois retardé, impossible.
L'un des éléments majeurs de cette mission est le bras manipulateur LMK, chargé de prélever des échantillons de régolithe, dont la taille des particules peuvent aller jusqu'à 2,8 mm. LMK devra prélever au moins 30 échantillons durant sa période opérationnelle, d'un volume de 2 cm3 chacun. Le rayon maximale du bras manipulateur est de 1,5 mètre.
| Instrument | Description | Masse | Fournisseur | Note |
|---|---|---|---|---|
| ADRON-LR | Analyse de la composition du régolithe par analyse neutrons et gamma | 6,7 kg | IKI RAN | Descriptif détaillé (en russe) de l'instrument |
| ARIES-L | Étude du régolithe, par mesure du plasma et particules neutres | 4,6 kg | IKI RAN | |
| BUNIE | Système de contrôle de la sonde (stockage des données scientifiques) | 2,3 kg | IKI RAN | |
| LAZMA-LR | Spectromètre de masse laser pour études rapprochées d'échantillons lunaires | 2,7 kg | IKI et Université de Berne (Suisse) | |
| LIS-TV-RPM | Imageur-spectromètre infrarouge des minéraux, à distance | 2,0 kg | IKI RAN | Vidéo (en russe) expliquant son fonctionnement |
| LMK | Bras manipulateur pouvant récolter des échantillons du sol | 5,5 kg | IKI RAN | Permet le fonctionnement de LAZMA-LR et LIS-TV-RPM |
| PmL | Mesure de la poussière et des micrométéorites | 0,9 kg | IKI RAN | |
| STS-L | Système de caméras devant fournir un panorama 3D du site d'alunissage | 4,6 kg | IKI RAN | |
| Rétro-réflecteur laser | Mesure des mouvements de libration de la Lune et de la distance Terre-Lune | 0,1 kg | NPO SPP | |
| LINA-XSAN | Mesure des neutrons et des ions | 0,7 kg | ISP (Suède) | Instrument annulé, a volé sur Chang'e 4 |
| TERMO-L | Mesure des caractéristiques thermophysique du régolithe | 1,2 kg | GEOCHI | Instrument annulé, volera sur Luna 27 |
Notes et références
- (en) Brian Harvey, The Rebirth of the Russian Space Program - 50 Years After Sputnik, New Frontiers, Springer-Praxis, , 358 p. (ISBN 978-0-387-71354-0, lire en ligne), p. 325-36
- (en) Anatoly Zak, « Luna-Glob project », sur russianspaceweb.com (consulté le )
- Vladimir Grishin (Roscosmos), « FSA report to the CCSDS Management Council Noordwijk, Netherlands octobre 2009 »,
- « Луна-25 "Глоб" », sur kosmolenta.com (consulté le )
- (ru) « ИКИ: РФ начнет запуск автоматических станций к Луне в 2018 году », sur РИА Новости, 20141003t1814 (consulté le )
- (en) Anatoly Zak, « Luna-Glob landing mission », sur russianspaceweb.com (consulté le )
- (en) Anatoly Zak, « Status of the Luna-Glob project in 2013 », sur russianspaceweb.com (consulté le )
- (en) Anatoly Zak, « Luna-Glob faces new delays in 2015 », sur russianspaceweb.com (consulté le )
- « Луна-25 "Глоб" », sur kosmolenta.com (consulté le )
- (en) Anatoly Zak, « Luna-Glob's stop and go », sur russianspaceweb.com (consulté le )
- (en-US) « Russia's Luna-Glob faces technical, political and ballistic issues », sur NASASpaceFlight.com, (consulté le )
- (ru) « Роскосмос назвал сроки посадки первой российской станции на Луну », sur РИА Новости, 20200428t1815 (consulté le )
- (ru) « nic-rkp.ru »
- « Новости. Акустические испытания автоматической станции «Луна-25» », sur www.roscosmos.ru (consulté le )
- « Launch of Russia’s Luna-25 automatic station to Moon rescheduled for 2022 », sur TASS (consulté le )
- « Интервью. «Луна-25» готовится к старту », sur www.roscosmos.ru (consulté le )
- (en) « Luna-25 probe to be launched late September — Roscosmos CEO », sur Tass,
- (en) Maxim Litvak, « Russian Lunar Exploration Missions », Roscosmos,
- Dorian De Schaepmeester, « Retour de la Russie sur la Lune : les détails de la mission qui se posera en 2022 », sur www.futura-sciences.com, (consulté le ).
- « Луна-25 "Глоб" », sur kosmolenta.com (consulté le )
- (en) « Luna-25 (Luna-Glob Lander) Payload », IKI (consulté le )
Voir aussi
Articles connexes
Lien externe
 Portail de l’astronautique
Portail de l’astronautique  Portail de la Lune
Portail de la Lune  Portail de la Russie
Portail de la Russie