VIPER (astromobile)
VIPER (Volatiles Investigating Polar Exploration Rover) est une mission spatiale développée par l'agence spatiale américaine, la NASA reposant sur un astromobile (rover) déposé à la surface de la Lune en 2023. VIPER est le premier engin spatial chargé de mesurer in situ les gisements de glace d'eau que des orbiteurs ont détecté depuis l'orbite sans toutefois pouvoir quantifier de manière précise les caractéristiques des gisements. A l'aide de ses instruments l'astromobile doit mesurer la distribution verticale et horizontale ainsi que les caractéristiques physiques de la glace d'eau et d'autres volatiles présents dans les régions du pôle sud de la Lune où la température est suffisamment basse pour permettre son stockage à une échelle de temps géologique. L'eau est un élément rare sur la Lune et elle peut jouer un rôle central dans les futures missions d'exploration de la Lune de longue durée impliquant des équipages qui sont prévues dans le cadre du Programme Artemis. Elle peut fournir les consommables nécessaires - oxygène, eau de consommation et ergols - grâce aux technologies d'utilisation des ressources in situ et éviter ainsi leur transport très couteux depuis la Terre. VIPER a pour objectif de collecter les données permettant de vérifier que les caractéristiques des gisements en eau permettent leur exploitation dans des conditions économiquement acceptables.
Astromobile lunaire

| Organisation |
|
|---|---|
| Constructeur |
|
| Domaine | Analyse des ressources en eau de la Lune |
| Type de mission | Astromobile |
| Statut | En cours de développement |
| Lancement | novembre 2023 (estimation en septembre 2021) |
| Lanceur | Falcon Heavy |
| Durée de vie | 100 jours terrestres |
| Masse au lancement | environ 430 kg |
|---|---|
| Source d'énergie | Panneaux solaires |
| Puissance électrique | 450 Watts |
| Localisation | cratère Nobili (pôle Sud de la Lune) |
|---|
| TRIDENT | Foreuse |
|---|---|
| MSolo | Spectromètre de masse |
| NIRVSS | Spectromètre proche infrarouge |
| NSS | Spectromètre à neutrons |
VIPER doit étudier la surface et la couche superficielle de plusieurs régions de la Lune représentatives des différents types de terrain dans lesquelles la glace d'eau est conservée. A cet effet il doit effectuer des mesures en surface sur une partie de la superficie de ces sites et prélever à l'aide d'une foreuse des échantillons de sol jusqu'à un mètre de profondeur et analyse leur composition à l'aide de ses spectromètres tout en déterminant les principales caractéristiques du sol (température, dureté, ...). Au cours de sa mission d'une durée de quatre mois lunaires, l'astromobile doit parcourir une dizaine de kilomètres.
VIPER a une masse de 430 kilogrammes et est alimenté en énergie par des panneaux solaires. Sa charge utile comprend une foreuse qui prélever des carottes de sol et trois instruments permettant de détecter les éléments volatiles et d'analyser le produit des forages. L'astromobile est développé par le Centre spatial Lyndon B. Johnson de la NASA. Il sera déposé dans le cratère Nobili par un atterrisseur de la société Astrobotic Technology, qui sera lui même placé en orbite par une fusée Falcon Heavy.
Contexte
Une Lune pas si desséchée
La Lune a été longtemps été considérée comme un astre complètement dépourvu d'eau (eau présente < 100 parties par million). Une série de découvertes effectuées entre 2008 et 2010 entraine une révision complète de cette hypothèse. De l'eau et des éléments volatiles sont détectés dans des verres volcaniques. L'impacteur LCROSS détecte la présence d'eau dans les régions de la Lune perpétuellement à l'ombre. Cette eau a potentiellement trois origines[1] :
- eau stockée dans le manteau de l'astre à sa formation elle est libérée par des processus géologiques,
- eau apportée par des astéroïdes et des comètes venues s'écraser à la surface de la Lune
- eau formée in situ à la surface à la suite d'interactions avec le plasma du vent solaire.
La glace d'eau aux pôles de la Lune
_and_north_pole_(right).webp.png.webp)
L'axe de rotation de la Lune est pratiquement perpendiculaire au plan de l'écliptique (à la direction du Soleil) : son inclinaison est de seulement 1,5° alors que l'axe des pôles de la Terre est incliné de 23,5°. En conséquence le rayonnement solaire est toujours rasant dans les régions polaires de notre satellite et les reliefs créent des zones en permanence à l'ombre (notamment les fonds des cratères) dans lesquelles la température se maintient en dessous de 0°C. Le pôle sud de la Lune se caractérise par des reliefs particulièrement importants (Bassin Pôle Sud-Aitken) multipliant les sites situés dans une ombre perpétuelle[2].
L'eau est apportée régulièrement à la surface de la Lune par les astéroïdes et les comètes qui s'y écrasent mais elle ne se conserve pas. En effet durant la journée lunaire, la température de la surface dépasse les 100 °C. La glace d'eau se gazéifie puis s'échappe dans l'espace interplanétaire. Toutefois la sonde spatiale de la NASA Lunar Prospector, lancée en 1999, détecte des traces d'hydrogène indiquant la présence d'eau, au fond des cratères situés au niveau des pôles, qui présentent la caractéristique de ne jamais être éclairés par le Soleil. En effet au fond de certains de ces cratères, la température est constamment inférieure à 100 kelvin, ce qui empêche la glace d'eau de s'évaporer et de se sublimer[3]. Le spectrographe ultraviolet lointain LAMP (Lyman Alpha Mapping Project) embarqué à bord de l'orbiteur lunaire de la NASA LRO, lancée en 2009, semble indiquer la présence de 1 à 2% de glace d'eau en surface au fond des cratères d'impact alors que les scientifiques s'attendaient à ce que celle-ci, du fait du bombardement du vent solaire, ne se conserve que sous la surface[4]. L'analyse des éjectas produits par l'impacteur LCROSS (lancé avec LRO) indiquent que la glace est mélangée au régolithe et ne représente que 4 à 5% de la masse totale. On ne peut toutefois exclure qu'il y ait des blocs de glace pure. Toutefois, pour des raisons qui ne sont pas clairement établies il y a beaucoup moins de glace d'eau à la surface de la Lune qu'à la surface de Mercure qui est pourtant une planète plus petite et beaucoup plus chaude. Les instruments de la sonde spatiale MESSENGER placée en orbite autour de cette planète ont permis d'établir qu'il y avait 40 fois plus de glace d'eau à sa surface que sur celle de la Lune[5].
Les modèles évaluent la masse de glace d'eau présente à la surface de la Lune au niveau des pôles à un milliard de tonnes dont 735 millions de tonnes au pôle Sud et 342 millions de tonnes au pôle Nord. L'eau est principalement concentrée au fond des cratères. Au pole Sud le cratère Shoemaker en contiendrait 328 millions de tonnes, Cabeus 163 millions de tonnes et Haworth 142 millions de tonnes. Au pôle nord, caractérisé par des reliefs moins importants, le cratère Plasket en contiendrait 75 millions de tonnes. Toujours selon les modèles la glace d'eau est sans doute absente des couches superficielles et sa proportion serait comprise en 0,015 et 5%. L'eau s'est progressivement accumulée au cours des deux derniers milliards d'années, temps nécessaire pour qu'elle s'accumule dans les pièges à froid que constituent les cratères[6].
Enjeux

L'eau constitue une ressource précieuse pour les futures missions avec équipage qui seraient envoyées à la surface de la Lune. Elle permet en effet en utilisant des technologies d'utilisation des ressources in situ de renouveler les consommables d'une mission - oxygène, eau pour la consommation, carburant pour les moteurs-fusées - et ainsi d'envisager des missions de longue durée sinon permanentes. Mais les observations effectuées jusqu'à présent uniquement depuis l'orbite ne permettent pas de savoir sous quelle forme l'eau se présente (proportion, association chimique...) ce qui ne permet pas de déterminer comment celle-ci pourra être exploitée. Plusieurs nations spatiales envisagent d'envoyer une mission pour mener une étude in situ[7].
Le projet Resource Prospector

En 2017, dans un contexte général redevenu favorable à l'exploration de la Lune, la NASA lance un projet d'astromobile (rover) lunaire dont l'objectif est d'étudier la glace d'eau présente dans les cratères du pôle sud. D'après les données collectées depuis l'orbite, l'eau y est plus abondante qu'au pôle nord. Le rover Resource Prospector dispose d'une foreuse et deux instruments principaux : le détecteur de neutrons NSS (Neutron Spectrometer Subsystem) et un spectromètre infrarouge NIVSS (spectromètre à infrarouges quasi volatiles). Les carottes de sol prélevées sont placées dans un four OVEN (Oxygen and Volatile Extraction Node) qui permet de dégager les substances volatiles qui sont analysées par l'instrument LAVA (Lunar Advanced Volatile Analysis). Le rover d'une masse évaluée à 300 kg est déposé sur le sol lunaire par un atterrisseur. L'ensemble représente une masse au lancement de 5 tonnes. L'énergie est fournie par un panneau solaire vertical (pour compenser la faible élévation du Soleil) et la durée de la mission est inférieure à une journée solaire. Le projet est proposé en réponse à un appel à propositions du programme Discovery (missions d'exploration du système solaire à bas cout) mais n'est pas retenu[5].
Le programme Artemis
Le programme Artemis voulu par le président Trump et dont l'objectif est d'amener un équipage à la surface de la Lune d'ici 2024, réactive le projet d'astromobile. En effet le projet a pour objectif de créer une installation semi-permanente au pôle Sud de la Lune pour bénéficier des ressources en eau et contribuer à la viabilité du projet. Le développement d'une version allégée et moins coûteuse de Resource Prospector (abandon des instruments OVEN et LAVA) est décidée fin par la NASA. Le futur engin, baptisé VIPER, sera le premier astromobile de la NASA déposé à la surface de la Lune (alors que l'agence spatiale américaine en a déjà déposé quatre à la surface de Mars). VIPER sera le cinquième astromobile automatisé lunaire après les deux Lunokhod soviétiques et les deux Chang'e chinois[7].
Objectifs scientifiques de la mission
Les deux objectifs principaux de la mission sont[8] :
- Déterminer l'état et la distribution de la glace d'eau et des autres volatiles piégés dans la région polaire de la Lune.
- Fournir les données permettant à la NASA d'évaluer le potentiel d'exploitation des ressources in situ dans les régions polaires de la Lune.
Limites des mesures effectuées depuis l'orbite
Pour pouvoir évaluer le caractère exploitable des ressources en eau présentes dans les régions polaires, il est nécessaire de mieux comprendre leur distribution et leurs caractéristiques physiques. En effet la présence et l'abondance en eau ont été mesurées de manière indirecte par des instruments installés sur des satellites en orbite. Les mesures effectuées ne permettent pas déterminer de manière précise la distribution horizontale et verticale de la glace d'eau ainsi que sa structure physique. Pour pouvoir exploiter celle-ci la concentration en glace d'eau doit être au minimum de 5 à 10%. L'objectif de la mission est de mesurer ces concentrations lorsqu'elles dépassent 2% et d'évaluer les concentrations dépassant 5% des volatiles susceptible d'être également exploités ou de constituer une source de problèmes comme l'hydrogène, le sulfure d'hydrogène, le méthane, le dioxyde de carbone et le monoxyde de carbone[9].
Les nombreux impacts de micro-météorites qui pénètrent jusqu'à une profondeur de un mètre les couches superficielles du régolithe ont, selon les modèles, sans doute fait disparaitre en partie l'eau présente dans les 10 à 20 premiers centimètres. En mesurant sur place la distribution verticale des concentrations en eau on pourra mieux interpréter les mesures effectuées depuis l'orbite et déterminer si la quantité de matériaux à manipuler pour obtenir de l'eau est compatible avec les modèles économiques[9].
Pré-classification des terrains en fonction de leur potentiel en eau
Pour effectuer ces évaluations sur le terrain, un carte des zones dans lesquelles la température permet à la glace d'eau de se conserver (ISR ou Ice Stability Regions) à des échelles géologiques (évaporation/sublimation inférieure à 1 millimètre sur une période de un milliard d'années) a été réalisée [Note 1]. Elle a permis de classer les terrains du pôle Sud en quatre catégories[10] :
- Présence de glace d'eau superficielle : la glace d'eau est présente en surface. C'est le cas en particulier des régions perpétuellement à l'ombre (PSR ou Permanently Shadowed Regions).
- Présence de glace d'eau à faible profondeur : la glace d'eau est présente à une profondeur comprise entre 0 et 50 centimètres.
- Présence de glace d'eau en profondeur : la glace d'eau est présente à une profondeur comprise entre 50 et 100 centimètres.
- Absence de glace d'eau dans le sous-sol entre 0 et 100 centimètres.
Objectifs primaires
Les quatre objectifs primaires, qui conditionnent le succès de la mission, sont :
- Mesure à la surface de la région polaire de la Lune de l'état physique et de l'abondance des éléments volatiles comprenant de l'hydrogène dont l'eau, lorsque sa concentration dépasse 2%, et l'hydrogène, le sulfure d'hydrogène, le méthane, le dioxyde de carbone et le monoxyde de carbone lorsque leur concentration dépasse 5%. La mesure de la distribution latérale doit se faire tous les décimètres.
- Mesure dans les couches superficielles du sol par tranche de 10 centimètres jusqu'à une profondeur de 80 centimètres de la quantité de volatiles porteurs d'hydrogène lorsque leur concentration dépasse 0,5% (en hydrogène équivalent en eau).
- Caractériser les éléments volatiles dans les quatre types de terrain (eau en surface, à faible profondeur, en profondeur, absente dans le premier mètre).
- Définir le contexte géologique dans chacune des régions étudiées en mesurant les températures en surface et en sous-sol et en déterminant les caractéristiques minéralogiques et mécaniques du régolithe lunaire.
Sélection du site lunaire
Plusieurs sites situés près du pôle Sud de la Lune ont été évalués pour la mission de VIPER. Trois des sites ont été étudiés de manière plus détaillée. Un modèle numérique de terrain a été établi pour chacun d'eux à partir de données recueillies par les orbiteurs lunaires. Ces modèles ont été utilisés pour calculer les paramètres jouant un rôle critique dans la mission tels que les périodes d'éclairement des panneaux solaires et celles durant lesquelles une communication directe avec la Terre peut peut être établie. Ces modèles ont également permis d'estimer la température en surface et dans les couches superficielles du sous-sol ainsi que la pente des terrains. Ces données ainsi que l'inventaire des dangers et obstacles ont été utilisées pour définir le parcours de l'astromobile. Le parcours est défini de manière à comporter des points (dits Safe Heaven) où les périodes d'obscurité ne dépassent pas 70 heures (durée maximale de survie de l'astromobile en mode hibernation). Une quinzaine de sites ont été envisagés et quatre d'entre eux ont fait l'objet d'une étude plus détaillée dont le petit cratère cratère Nobili, Haworth et Shoemaker. A Nobili la concentration des zones scientifiquement intéressantes permet de remplir les objectifs de la mission au bout de deux journées lunaires. Les objectifs sont atteints sur les deux autres sites au bout de la troisième ou quatrième journée lunaire[11]. Le cratère Nobili, dont les zones en permanence à l'ombre sont larges de 500 à 800 mètres, est finalement retenu car pour des raisons scientifiques mais également pour des raisons techniques : terrains élevés avec une bonne visibilité de la Terre (pour les télécommunications) et lignes de crêtes qui ne sont à l'ombre que 50 heures durant la nuit lunaire de 15 jours[12],[13].
Développement du projet

Le projet VIPER est géré au sein de la NASA par le Centre spatial Lyndon B. Johnson (Houston, Texas) qui est également chargé de la conception et de l'assemblage de l'astromobile. Le centre de recherches Ames (Californie) de la NASA développe deux des trois instruments[14]. La foreuse est fourni par la société Honeybee Robotics implantée à Altadena, Californie). Enfin la société Astrobotic Technology de Pittsburgh (Pennsylvanie) a été sélectionnée en juin 2020 dans le cadre du programme Commercial Lunar Payload Services (CLPS) pour développer l'engin chargé de déposer VIPER sur le sol lunaire[15]. L'atterrisseur Griffin peut déposer une charge de 475 kilogrammes sur la Lune avec une précision à l'atterrissage de 100 mètres. L'engin dispose de cinq moteurs-fusées principaux et de 12 moteurs chargés du contrôle d'attitude. Il dispose sur sa partie supérieure de deux jeux de rampes déployables permettant de débarquer l'astromobile au choix à l'avant ou à l'arrière[16].
La NASA a entamé le développement de la foreuse TRIDENT en 2016 en confiant sa conception et sa réalisation à la société Honeybee Robotics dans le cadre de son programme Small Business Innovative Research (SBIR). L'ensemble formé par la foreuse et le spectromètre MSOLO (baptisé PRIME-1) est testé au centre de recherche Glene en 2019. Un radiateur destiné à stabiliser la température de MSOLO est ajouté à l'automne 2020[17].
En mars 2021 la société Astrobotic Technology fournit au centre Johnson une maquette de la partie supérieure de l'atterrisseur Griffin pour que les opérations de débarquement de l'astromobile sur la surface de la Lune puissent être testées[18]. Le même mois est inaugurée dans le centre une salle blanche d'une superficie de près de 100 m² pour l'assemblage de l'astromobile. Une maquette doit tout d'abord être produite dans un délai de trois mois avant l'assemblage du modèle de vol qui doit avoir lieu au cours de l'été 2022[19].
Caractéristiques techniques
Un environnement contraignant
Le pôle Sud de la Lune, destination de la mission, constitue un environnement difficile qui pèse fortement sur la conception de l'astromobile[20]. :
- La lumière rasante crée des ombres allongées qui se déplacent rapidement avec un impact sur la navigation et la production d'énergie.
- Les objectifs de la mission nécessitent que l'astromobile circule dans un environnement peu propice (cratères, pentes, roches). L'astromobile doit disposer de capteurs fournissant des informations très détaillées sur son environnement immédiat et le pilote sur Terre doit disposer de logiciels de navigation adaptés.
- L'identification d'un parcours compatible avec les capacités de l'astromobile pourrait être difficile. Pour accroitre celles-ci l'astromobile dispose d'une suspension active lui permettant de passer dans des terrains très meubles. Des logiciels sont développés par exemple pour déduire les formes à partir des ombres.
- La hauteur de la Terre au-dessus de l'horizon est peu élevée ce qui entrainera des coupures de communication. Leur prise en compte pèse sur la quantité d'énergie et la masse de l'astromobile.
- La température varie fortement allant de 40 kelvin dans les zones en permanence à l'ombre à 300 kelvin en plein soleil.
Astromobile

VIPER est le premier astromobile lunaire de la NASA. Il est conçu pour prendre en compte l'évolution rapide de l'environnement lunaire (alternance jour/nuit) et la nécessité de mener rapidement les opérations (durée de vie limitée). Son coût de développement est beaucoup plus faible que ses homologues martiens (Curiosity, Perseverance) mais la prise de risque (probabilité d'une panne) est plus importante. L'astromobile est conçu pour être opéré depuis la Terre (navigation, science) en quasi temps réel[16].
VIPER est un engin de 430 kilogrammes environ haut de 2,5 mètres pour une longueur et une largeur de 1,5 mètre. Il est équipé de quatre roues et est conçu pour parcourir au moins 20 kilomètres à la surface de la Lune. L'énergie est fournie par trois panneaux solaires en position verticale (sur les côtés et l'arrière de l'astromobile) pour optimiser l'exploitation du rayonnement solaire qui est rasant dans les régions polaires. D'une superficie totale de 1 m² ils fournissent au maximum 450 Watts. L'énergie est stockée dans des batteries qui permettent à l'astromobile de survivre durant 96 heures lorsque le Soleil n'éclaire plus les cellules solaires. Pour circuler parmi les cratères sur un sol à la fois en pente et d'une consistance très fine sans s'enliser, l'engin utilise un nouveau type de roulement. Il peut lever de manière indépendante chacune de ses roues pour les dégager. Chacune peut être orientée de manière indépendante et comporte une suspension active. Ceci permet à VIPER de se déplacer latéralement ou en diagonale tout en maintenant fixe son orientation ce qui lui permet à la fois de pointer en permanence vers sa cible scientifique et d'optimiser l'exposition des panneaux solaires. La vitesse de pointe est de 20 centimètres par seconde (0,8 km/h) mais cette vitesse est abaissée à 10 cm/s (0,4 km/h) pour mettre en œuvre les instruments. Pour la navigation et ses recherches VIPER est équipé de caméras. Pour circuler dans des zones où règne une nuit permanente il dispose de projecteurs conçus pour fonctionner avec les caméras dans les conditions extrêmes des régions polaires de la Lune caractérisées par le froid et l'obscurité. L'astromobile est piloté à distance par un opérateur sur Terre : dans le cas le plus courant celui-ci fait avancer VIPER de 4 à 8 mètres puis examine les photos du terrain prises à l'issue de cette avancée pour décider du prochain déplacement. Les informations sont échangées avec les contrôleurs au sol à l'aide d'un émetteur fonctionnant en bande X qui émet directement vers la Terre, une antenne parabolique à grand gain permet un débit de 230 kilobits par seconde. Des antennes omnidirectionnelles peuvent être utilisées pour communiquer avec un débit de 2 kilobits par seconde. Sur Terre la NASA communique avec VIPER via les antennes paraboliques de 34 mètres de diamètre du réseau Deep Space Network de la NASA situées à Canberra, Goldstone et Madrid[21]. L'avionique repose sur un processeur RAD 750 et SP0. Le logiciel de navigation est en partie embarqué et en partie installé dans le centre de contrôle[16].
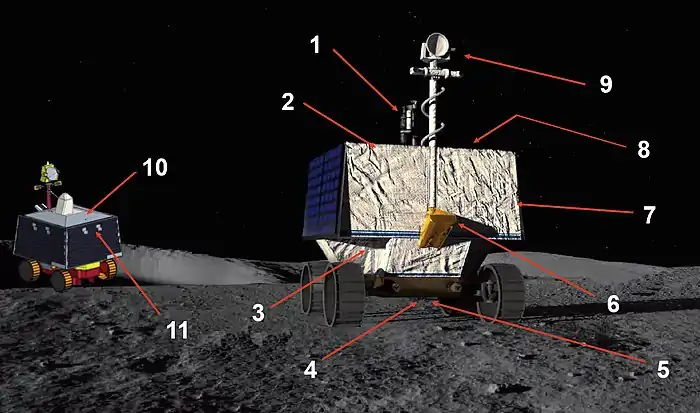
Système de navigation

Le système de navigation permet aux opérateurs d'observer l'environnement lunaire, de déterminer la position absolue et relative de l'astromobile et d'éviter les obstacles et les dangers. Pour les besoins de navigation, l'astromobile dispose de plusieurs caméras. Une paire de caméras de navigation (NavCam) sont fixées sur une plateforme inclinable et rotative située au sommet d'un mât. Elles fournissent des vues sur 360 degrés du terrain situé à une distance intermédiaire et lointaine. Les deux caméras ont chacune un champ de vue de 70 degrés et disposent d'un détecteur monochrome ayant une résolution de 2048 x 2048 pixels. La résolution spatiale des images est de 0,5 centimètres à 10 mètres de distance. Quatre caméras monochromes HazCam sont fixées sur les quatre côtés du châssis pour permettre d'éviter les obstacles et les dangers à proximité immédiate. Elle permettent également de mesurer l'enfoncement des roues dans le terrain meuble. Par ailleurs une paire de caméras monochromes AftCam sont fixées sur l'arrière et ont pour rôle de combler le point aveugle créé par les panneaux solaires et le radiateur. Les caméras AftCam et Hazcam ont un champ de vue horizontal de 110 degrés. Leur résolution spatiale est de 2048 x 2048 pixels. Toutes les caméras fonctionnent avec des filtres étroits dont la bande spectrale correspond à la lumière diffusée par les projecteurs. L'astromobile dispose de deux projecteurs à longue portée et faisceau étroit associés chacun à une des caméras Navcam. Leur puissance totale est de 500 Watts. Six projecteurs à courte portée d'une puissance unitaire de 60 Watts éclairent les environs immédiats du châssis assurant une couverture à 360 degrés. La centrale à inertie et le viseur d'étoiles fournissent des données permettant de situer l'astromobile, de déterminer son orientation et ses mouvements dans les trois axes. Le viseur d'étoiles est orienté vers le zénith pour éviter le Soleil tandis que la centrale à inertie est située au centre de masse de l'astromobile[22].
Foreuse Trident
Pour remplir ses objectifs, l'astromobile dispose d'une foreuse TRIDENT (The Regolith and Ice Drill for Exploring New Terrain) qui est chargée de prélever des carottes de sol riches en éléments volatiles jusqu'à une profondeur de 1 mètre. La composition des matériaux extraits est déterminée ensuite par deux spectromètres. TRIDENT est une foreuse fonctionnant à la fois en rotation et en percussion. En percussion chaque coup a une énergie de deux joules et est répété 972 fois par minute. La vitesse de rotation est de 120 tours par minute. La foreuse a une masse de 20 kg sans compter le câblage et l'avionique qui représente 5,4 kilogrammes. La foreuse est stockée dans un volume dont les dimensions sont de 20,6 × 33,3 × 168 centimètres. Elle consomme selon le mode de forage entre 20 et 175 watts. Pour réduire les risques liés aux variations de température, de blocage de la tarière dans le sol et réduire la quantité d'énergie nécessaire, la foreuse creuse le sol par tranche de 10 centimètres de long en ramenant à chaque fois le sol prélevé. La vitesse de pénétration de la tarière et l'énergie consommée sont également utilisées pour mesurer la résistance du sol et déterminer conjointement avec les mesures des autres instruments la nature physique de la glace (s'agit il de régolithe mélangé avec de la glace ou de glace cimentée par des grains de régolithe ?). TRIDENT comprend une résistance chauffante de 40 Watts et deux capteurs de température (le premier situé au niveau de la tête de la tarière, le second 20 centimètres plus haut). Les mesures de ces capteurs seront utilisées pour déterminer le flux de chaleur en provenance du noyau de la Lune[23].
Instruments scientifiques
Le terrain et les échantillons sont analysés par trois spectromètres : le spectromètre à neutrons NSS, le spectromètre proche infrarouge NIRVSS et le spectromètre de masse MSOLO[24],[14] :
Spectromètre à neutrons NSS

Le spectromètre à neutrons NSS (Neutron Spectrometer System) est utilisé durant les déplacements de l'astromobile pour détecter les matériaux riches en hydrogène et participer ainsi à la sélection des sites à étudier de manière détaillée. L'instrument sert également à cartographier les gisements en glace d'eau. Le capteur de l'instrument est fixé à l'avant de l'astromobile. Il consiste en des tubes remplis d'hélium-3 conçus pour détecter les neutrons d'origine thermique épithermique. L'instrument est dimensionné de manière à détecter la présence d'hydrogène dans le sol à condition que celui-ci représente au moins 0,5% de sa masse et que l'astromobile se déplace à une vitesse inférieure ou égale à 10 centimètres par seconde. La précision absolue est de 5 à 10%. La masse de NSS est de 1,9 kg et il consomme 1,6 Watts. L'instrument est développé par le centre spatial Ames de la NASA[22],[16]. .
Spectromètre de masse MSolo
Le spectromètre de masse MSolo (Mass Spectrometer Observing Lunar Observations) est une version modifiée d'un instrument commercialisé par la société Inficon. MSolo est utilisé durant les déplacements de l'astromobile pour identifier les emplacements riches en hydrogène (et donc en glace d'eau) intéressants à étudier. Il contribue ensuite à l'analyse des prélèvements effectués par la foreuse. MSolo permet de mesurer les éléments chimiques dont la masse atomique est inférieure à 100 (en particulier l'hydrogène, l'hélium, le monoxyde de carbone, le dioxyde de carbone, le méthane, le sulfure d'hydrogène, le dioxyde de soufre,...) et mesurer l'abondance en eau. L'instrument permet de déterminer l'origine de la glace d'eau en mesurant le ratio deutérium/hydrogène (20 ppm ==> origine protosolaire, 200 ppm ==> origine cométaire). La résolution de MSolo est de 15 ppm avec un intervalle de confiance de 95%. MSolo comprend une cavité de Faraday (pression partielle minimum détectable : 1,5 10-12 torr) et un multiplicateur d'électrons (pression partielle minimum détectable : 2 10-15 torr). L'instrument a été adapté par le centre spatial Kennedy pour lui permettre de fonctionner dans l'environnement spatial. Une interface a été développée pour permettre les échanges avec le système de production d'énergie et de communications de l'astromobile. Un cache mobile a été ajouté pour le protéger de la poussière lunaire. L'instrument a une masse de 6 kilogrammes et consomme en moyenne lorsqu'il fonctionne 35 Watts[25],[16].
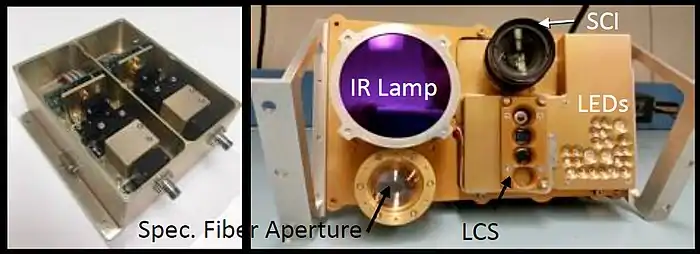
Spectromètre infrarouge NIRVSS

Le spectromètre fonctionnant en proche infrarouge NIRVSS (Near InfraRed Volatiles Spectrometer System) est un instrument utilisé pour mesurer en quasi temps réel les changements affectant les matériaux extraits par la foreuse. Par ailleurs, en utilisant un éclairage dans différentes longueurs d'onde, NIRVSS doit fournir des informations complémentaires sur le contexte des excavations : nature du régolithe, apparence de la surface. NIRVSS comprend plusieurs composants. Le capteur optique est placé de manière à pouvoir étudier le sol sous l'astromobile ainsi que la pile formée par les matériaux extraits par la foreuse. Il est accompagné par un éclairage qui lui est propre, un système d'étalonnage et un radiomètre thermique à quatre canaux. Cet ensemble est complété par une caméra AIM (Ames Imaging Module) dotée d'un processeur CMOS (4 mégapixels) utilisant sept rampes de lampes LED fonctionnant dans les longueurs d'onde 348, 410, 540, 640, 740, 905 and 940 nanomètres. Le spectromètre comporte deux canaux. Le canal à ondes courtes comprend les longueurs d'onde entre 1300 et 2400 nanomètres avec une résolution spectrale de 10 à 20 nanomètres. Le canal à ondes longues comprend les longueurs d'onde situées entre 2200 et 4000 nanomètres avec une résolution spectrale de 20 à 40 nanomètres. Le spectromètre est connecté à la partie optique via une fibre optique. NIRVSS a une masse de 3,57 kilogrammes et consomme 29,5 Watts lorsque tous ses composants fonctionnent (capteur optique 5,26 Watts, projecteurs 12,3 Watts et spectromètre 12 Watts). L'instrument est développé par le Centre spatial Lyndon B. Johnson[26],[16].
Déroulement de la mission (prévisionnel)
Tests en conditions réelles des instruments
Les trois instruments ainsi que la foreuse sont testés sur la Lune avant d'être utilisés par VIPER. Ils sont déposés à la surface de la Lune dans le cadre de missions faisant partie du programme Commercial Lunar Payload Services.
- L'envoi à la surface de la Lune de la foreuse et de l'instrument MSolo sont confiés à la société Intuitive Machines. Le lancement doit avoir lieu en décembre 2022[27].
- Les instruments NIRVSS et NSS font partie d'un ensemble d'équipements de la NASA qui doit être lancé fin 2021/début 2022 par la société Astrobotic Technology et déposés sur la Lune par son atterrisseur Peregrine dans le cadre de la mission Peregrine Mission One[28],[29].
Lancement de VIPER et transit jusqu'à la Lune
La mission comprend trois phases : la première comprend le lancement, le transit jusqu'à la Lune (5 jours) et le séjour en orbite autour de la Lune (5 jours). Le lancement de l'astromobile VIPER, installée sur l'atterrisseur Griffin, est planifiée pour novembre 2023 par une Falcon Heavy. Durant le transit l'instrument NSS est étalonné tandis que le fonctionnement des instruments MSolo et NIRVSS sont vérifiés. La deuxième phase comprend la descente jusqu'à la surface, l'étalonnage de NIRVSS avec une cible fixée sur l'atterrisseur et le débarquement de l'astromobile sur le sol lunaire grâce à des rampes installées au sommet de l'atterrisseur Griffin. L'objectif est que l'astromobile fasse ses premiers tours de roue à la surface de la Lune six heures après l'atterrissage. Dès que VIPER se trouve sur le sol, la foreuse est déployée[30],[7].
Déroulement de la mission scientifique
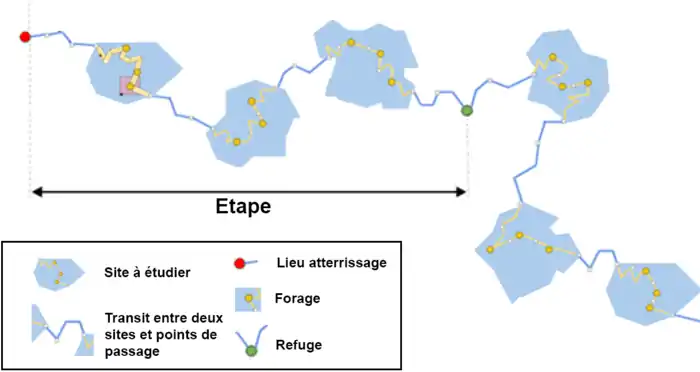
La mission scientifique constitue la troisième phase. La durée de celle-ci (mission primaire) est d'environ 100 jours. Cette durée mission est limitée car toute la région sera plongée dans l'obscurité au bout de 4 mois à cause du cycle des saisons. Le scénario de base prévoit l'étude de 12 sites et un parcours total d'environ 25 kilomètres. Compte tenu de la contrainte de la durée, l'équipe devra être très réactive pour prendre en compte l'impact des observations effectuées sur la suite de la mission. Chaque site est défini comme une zone d'une superficie de 3800 m² dans laquelle se trouvent des terrains propices à la conservation de l'eau. Chaque site doit comporter une part majoritaire (au moins 66%) de terrain d'une catégorie donnée (glace d'eau en surface ou à faible profondeur ou à profondeur élevée ou dépourvu de glace d'eau). Les sites, la trajectoire suivie, l'emplacement des forages a été définie à l'avance à l'aide d'un modèle de terrain à l'échelle 1 mètre. Les opérations sur le sol lunaire comprennent deux types d'activité : celles réalisées sur ces sites et celles réalisées durant le transit entre ces sites[31],[13].
- Durant les transits, les instruments fonctionnent mais l'astromobile peut se déplacer à des vitesses supérieures à 10 centimètres par seconde (vitesse maximale pour le recueil de données scientifiques).
- Une fois sur un site l'astromobile commence par mesurer le degré d'hydratation de la surface en utilisant les instruments NSS, NIRVSS et MSOLO et en se déplaçant à une vitesse inférieure à 10 cm/seconde. Les caractéristiques du terrain sont relevées (température, géomorphologie, minéralogie). À la suite des observations in situ les sites prévus pour les forage sont validés ou éventuellement modifiés. Sur chaque site trois forages séparés de quelques dizaines de mètres sont effectués. (Toutefois lorsque le site est de type PSR (terrain perpétuellement à l'ombre / glace d'eau en surface), un seul forage sera effectué pour prendre en compte les contraintes thermiques et énergétiques propres à ce type de site). Les mesures des éléments volatiles doivent être effectuées sur 10 à 15% de la superficie du site et l'astromobile doit parcourir au minimum 224 mètres à l'intérieur de son périmètre[32].
L'astromobile dépend du Soleil pour son énergie. Aussi lorsque la journée lunaire s'achève (=14 jours terrestres), l'astromobile est déplacé jusqu'à un refuge où il se place en hibernation (arrêt des activités scientifiques de tous les systèmes non essentiels et des communications avec la Terre) en attendant la journée lunaire suivante. Le site servant de refuge est choisi de manière que l'interruption continue de l'ensoleillement n'y dépasse pas 70 heures (une nuit lunaire dure 336 heures environ). Lorsqu'une nouvelle journée lunaire débute, l'astromobile entame une nouvelle étape[33].
Notes et références
Notes
- Cette carte a été établie à partir de modèles de l'environnement thermique en surface et en sous-sol et validés pour les températures de surface par les observations effectuées depuis l'orbite.
Références
- (en) « Lunar Trailblazer - Science Objectives », sur Lunar Trailblazer, Caltech (consulté le )
- (en) Paul D. Spudis, « Ice on the Bone Dry Moon »,
- (en) Alan B. Binder et al., « Lunar Prospector: Overview », Science, vol. 281, no 5382, , p. 1475-1476 (DOI 10.1126/science.281.5382.1475, lire en ligne)
- (en) G. Randall Gladstone, Kurt D. Retherford et al., « Far‐ultraviolet reflectance properties of the Moon's permanently shadowed regions », Journal of Geophysical Research: Planets, vol. 117,, no E12, , p. 1475-1476 (DOI 10.1029/2011JE003913, lire en ligne)
- (es) Daniel Marín, « https://danielmarin.naukas.com/2017/04/27/la-sonda-lunar-resource-prospector/ », sur Eureka,
- (es) Daniel Marín, « ¿Cuánto hielo tiene la Luna? », sur Eureka,
- (es) Daniel Marín, « VIPER: un rover de la NASA para explorar el hielo de los polos de la Luna », sur Eureka,
- Volatile Investating Polar Exploration Rover, p. 5
- Volatile Investating Polar Exploration Rover, p. 5-6
- Volatile Investating Polar Exploration Rover, p. 6
- Volatile Investating Polar Exploration Rover, p. 16-18.
- Pierre-François Mouriaux, « La sonde lunaire américaine Viper visera le cratère Nobili », sur Air et Cosmos, (consulté le ).
- (en) « NASA picks landing site for VIPER lunar rover », sur spacenews.com, .
- (en) « New VIPER Lunar Rover to Map Water Ice on the Moon », NASA,
- (en) « NASA Selects Astrobotic to Fly Water-Hunting Rover to the Moon », NASA,
- (en) Paul Terry Fong, « VIPER », NASA,
- (en) « Polar Resources Ice Mining Experiment-1 (PRIME-1) », NASA,
- (en) « Moon Lander Mockup Arrives for Testing with VIPER Rover », NASA,
- (en) « NASA Practices VIPER Moon Rover Assembly in New Clean Room », NASA,
- (en) Daniel Andrews, « VIPER ! Pathfinding Lunar Resource Understanding », NASA, 8-10 juillet 2020
- (en) « The Rover: Key Features », NASA (consulté le )
- Volatile Investating Polar Exploration Rover, p. 9
- (en) K. Zacny, P. Chu1, V. Vendiola1, E. P. Seto1 et J. Quinn (15-20 mars 2021) « TRIDENT Drill for VIPER and PRIME1 Missions to the Moon » (pdf) dans 52nd Lunar and Planetary Science Conference 2021 : 31 p..
- (en) Stephen Clark, « NASA’s VIPER rover in development for scouting mission to moon’s south pole », sur spaceflightnow.com,
- Volatile Investating Polar Exploration Rover, p. 10-11
- Volatile Investating Polar Exploration Rover, p. 10
- (en) « NASA Selects Intuitive Machines to Land Water-Measuring Payload on the Moon », NASA,
- (en) « First Commercial Moon Delivery Assignments to Advance Artemis », NASA,
- (en) : David Dickinson, « Two new commercial landers are set to head to the Moon next year. », sur Sky and Telescope,
- Volatile Investating Polar Exploration Rover, p. 11-12
- Volatile Investating Polar Exploration Rover, p. 12-13
- Volatile Investating Polar Exploration Rover, p. 14-15
- Volatile Investating Polar Exploration Rover, p. 13-14
Bibliographie
- (en) Anthony Colaprete, « Volatile Investating Polar Exploration Rover », x, vol. x, , p. 1-27 (lire en ligne)Caractéristiques de l'astromobile VIPER et déroulement de la mission sur la Lune.
- (en) K. Zacny, P. Chu1, V. Vendiola1, E. P. Seto1 et J. Quinn (15-20 mars 2021) « TRIDENT Drill for VIPER and PRIME1 Missions to the Moon » (pdf) dans 52nd Lunar and Planetary Science Conference 2021 : 31 p.. — Description technique de la foreuse TRIDENT et de son mode de fonctionnement.
Voir aussi
Liens externes
 Portail de la robotique
Portail de la robotique  Portail de l’astronautique
Portail de l’astronautique  Portail de la Lune
Portail de la Lune