Ángulo
En geometría euclidiana, un ángulo es la figura formada por dos semirrectas, llamadas lados, que comparten un punto final común, llamado vértice.[1]

La medida de un ángulo es considerada como la amplitud del arco de circunferencia centrada en el vértice y delimitada por sus lados. Su medida es un múltiplo de la razón entre la longitud del arco y el radio. Su unidad natural es el radián, pero también se puede utilizar el grado sexagesimal o el grado centesimal.
Pueden estar definidos sobre superficies planas (trigonometría plana) o curvas (trigonometría esférica). Se denomina ángulo diedro al espacio comprendido entre dos semiplanos cuyo origen común es una recta. Un ángulo sólido es el que abarca un objeto visto desde un punto dado, midiendo su tamaño aparente.
Ángulo también se utiliza para designar la medición de un ángulo o de una rotación. Esta medida es la relación entre la longitud de un arco circular y su radio. En el caso de un ángulo geométrico, el arco está centrado en el vértice y delimitado por los lados. En el caso de una rotación, el arco está centrado en el centro de la rotación y delimitado por cualquier otro punto y su imagen por la rotación.
Historia y etimología
La palabra ángulo proviene del latín angŭlus, que significa 'esquina'. Está conectada con la raíz protoindoeuropea *ank-, que significa 'doblarse' o 'inclinarse'.[2]
Euclides define un ángulo plano como la inclinación recíproca, en un plano, de dos rectas que se encuentran entre sí y no son rectas entre sí. Según Proclus, un ángulo debe ser una cualidad o una cantidad, o una relación. El primer concepto fue utilizado por Eudemo, que consideraba un ángulo como una desviación de una línea recta; el segundo por Carpo de Antioquía, que lo consideraba como el intervalo o espacio entre las líneas que se cruzan; Euclides adoptó el tercer concepto. [3] [4]
Definición y características
Existen básicamente dos formas de definir un ángulo en el plano:
- Forma geométrica: Se le llama «ángulo» a la amplitud entre dos líneas de cualquier tipo que concurren en un punto común llamado vértice. Coloquialmente, ángulo es la figura formada por dos líneas con origen común. El ángulo entre dos curvas es el ángulo que forman sus rectas tangentes en el punto de intersección.
- Forma trigonométrica: Es la amplitud de rotación o giro que describe un segmento rectilíneo entorno de uno de sus extremos tomado como vértice desde una posición inicial hasta una posición final. Si la rotación es en sentido levógiro (contrario a las manecillas del reloj), el ángulo se considera positivo. Si la rotación es en sentido dextrógiro (conforme a las manecillas del reloj), el ángulo se considera negativo.
Definiciones clásicas
Euclides define un ángulo como la inclinación entre dos líneas que se encuentran una a otra en un plano y no están en línea recta. Según Proclo, un ángulo debe ser una calidad o una cantidad, o una relación. El primer concepto fue utilizado por Eudemo de Rodas, que describió un ángulo como desviación de una línea recta; el segundo por Carpo de Antioquía, que lo vio como el intervalo o el espacio entre las líneas que se intersecaban; Euclides adoptó un tercer concepto, aunque sus definiciones de ángulos rectos, agudos, y obtusos son cuantitativas.
Región angular
Se denomina región angular a cada una de las dos partes en que queda dividido el plano por un ángulo.[5]
Amplitud de un ángulo
Se llama amplitud de un ángulo a la medida de este.[5]
Unidades de amplitud
Las unidades utilizadas para la medida de los ángulos del plano son:
- Radián (usado oficialmente en el Sistema Internacional de Unidades)



Los ángulos se pueden medir mediante utensilios tales como el goniómetro, el cuadrante, el sextante, la ballestina, el transportador de ángulos o semicírculo graduado, graduador, etc.
Ángulos positivos y negativos
Aunque la definición de la medida de un ángulo no respalda el concepto de ángulo negativo, con frecuencia es útil imponer una convención que permita que los valores angulares positivos y negativos representen orientaciones y / o rotaciones en direcciones opuestas con respecto a alguna referencia.
En un sistema de coordenadas cartesiano bidimensional, un ángulo se define típicamente por sus dos lados, con su vértice en el origen. El lado inicial está en el eje x positivo, mientras que el otro lado o lado terminal está definido por la medida del lado inicial en radianes, grados o vueltas. Con ángulos positivos que representan rotaciones hacia el eje y positivo y ángulos negativos que representan rotaciones hacia el eje y negativo. Cuando las coordenadas cartesianas están representadas por la posición estándar, definida por el eje x hacia la derecha y el eje y hacia arriba, las rotaciones positivas son en sentido antihorario y las rotaciones negativas son en sentido horario.
En muchos contextos, un ángulo de -θ es efectivamente equivalente a un ángulo de «una vuelta completa menos θ». Por ejemplo, una orientación representada como -45° es efectivamente equivalente a una orientación representada como 360° -45° o 315°. Aunque la posición final es la misma, una rotación física (movimiento) de -45° no es lo mismo que una rotación de 315° (por ejemplo, la rotación de una persona sosteniendo una escoba descansando sobre un piso polvoriento dejaría huellas visualmente diferentes de regiones barridas en el suelo).
En la geometría tridimensional, «en el sentido de las agujas del reloj» y «en el sentido contrario a las agujas del reloj» no tienen un significado absoluto, por lo que la dirección de los ángulos positivos y negativos debe definirse en relación con alguna referencia, que suele ser un vector que pasa por el vértice del ángulo y es perpendicular al plano en donde se encuentran los rayos del ángulo.
En la navegación, los rumbos o acimut se miden en relación con el norte. Por convención, visto desde arriba, los ángulos de orientación son positivos en el sentido de las agujas del reloj, por lo que una orientación de 45° corresponde a una orientación noreste. Los rumbos negativos no se utilizan en la navegación, por lo que una orientación noroeste corresponde a un rumbo de 315°.
Tipos de ángulos
Los ángulos, de acuerdo con su amplitud, reciben estas denominaciones:

| Tipo | Descripción |
|---|---|
| Ángulo nulo
|
Es el ángulo formado por dos semirrectas coincidentes, por lo tanto su abertura es nula, es decir, de 0°. |
| Ángulo agudo
|
Es el ángulo formado por dos semirrectas con amplitud mayor de 0 rad y menor de rad.
Es decir, mayor de 0° y menor de 90° (grados sexagesimales), o menor de 100g (grados centesimales). |
| Ángulo recto
|
Un ángulo recto es de amplitud igual a rad.
Es equivalente a 90° sexagesimales (o 100g centesimales). Los dos lados de un ángulo recto son perpendiculares entre sí. |
| Ángulo obtuso
|
Un ángulo obtuso es aquel cuya amplitud es mayor a rad y menor a rad.
Mayor a 90° y menor a 180° sexagesimales (o más de 100g y menos de 200g centesimales). |
| Ángulo llano
|
El ángulo llano tiene una amplitud de rad.
Equivalente a 180° sexagesimales (o 200g centesimales). |
| Ángulo oblicuo
|
Ángulo que no es recto ni múltiplo de un ángulo recto.
Los ángulos agudos y obtusos son ángulos oblicuos. |
| Ángulo completo o perigonal
|
Un ángulo completo o perigonal, tiene una amplitud de rad.
Equivalente a 360° sexagesimales (o 400g centesimales). |



Ángulos coterminales
Se llama así a los ángulos que tienen el mismo lado final. Pueden ser en rotación contraria al ángulo dado o con una rotación mayor de 360°.
Ángulos convexo y cóncavo
En un plano, dos semirrectas (no coincidentes ni alineadas) con un origen común determinan siempre dos ángulos, uno convexo (el de menor amplitud) y otro cóncavo (el de mayor amplitud):[1]
| Tipo | Descripción |
|---|---|
| Ángulo convexo o saliente
|
Es el que mide menos de rad.
Equivale a más de 0° y menos de 180°sexagesimales (o más de 0g y menos de 200g centesimales). |
| Ángulo cóncavo, reflejo o entrante
|
Es el que mide más de rad y menos de rad.
Esto es, más de 180° y menos de 360° sexagesimales (o más de 200g y menos de 400g centesimales). |
Ángulos relacionados
Denominación relativo a su posición:
- Los ángulos consecutivos son los que comparten un lado y el vértice.
- Los ángulos adyacentes son los que tienen un vértice y un lado común, y los otros lados son semirrectas opuestas, pero no tienen ningún punto interior común, y suman 180°.
- Los ángulos opuestos por el vértice son aquellos cuyos lados son las semirrectas opuestas de los lados del otro.
Denominación en función de la suma de su amplitud:
- Los ángulos congruentes son aquellos que tienen la misma amplitud, es decir, que miden lo mismo.
- Los ángulos complementarios son aquellos cuya suma de medidas es π/2 radianes o 90°.
- Los ángulos suplementarios son aquellos cuya suma de medidas es π radianes o 180°.
- Los ángulos conjugados son aquellos cuyas medidas suman 2π radianes o 360°.
Cuando dos rectas son cortadas por una tercera, se forman las siguientes relaciones distantes:[6]
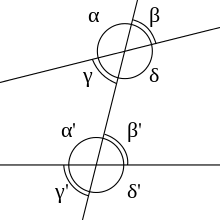
- Los ángulos alternos son aquellos ángulos dispuestos a distinto lado de la recta que corta otras dos pero que no comparten lado.
- o es alterno a o a




- o es alterno a o a




- y viceversa.
- Los ángulo alternos internos son aquellos ángulos comprendidos entre las dos rectas cortadas, pero situados a distinto lado de la recta cortante.
- es alterno interno a
- es alterno interno a
- Los ángulo alternos externos son aquellos ángulos no comprendidos entre las dos rectas cortadas, pero situados a distinto lado de la recta que corta.
- es alterno externo a
- es alterno externo a
- Los ángulos correspondientes son los que están a un mismo lado de la transversal, uno pertenece a la región interior y otro a la región exterior. Son congruentes cuando las rectas cortadas son paralelas.
Ángulos compuestos

Son los obtenidos mediante la suma o diferencia de ángulos. En la figura se representan dos sectores circulares contiguos, cada uno con su ángulo, denominados α y β respectivamente; la unión de los dos sectores tendrá por ángulo la composición, en este caso la suma, α + β, de los ángulos de los sectores que unimos.
Las razones trigonométricas de los ángulos compuestos están relacionadas con la de los ángulos componentes mediante las fórmulas de razones trigonométricas de ángulos compuestos, ver por ejemplo Identidades trigonométricas.
Ángulos de un polígono
Ángulos internos y externos
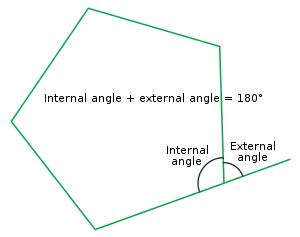
Un ángulo que forma parte de un polígono simple se llama ángulo interior si se encuentra en el interior de ese polígono simple, siendo formado por lados adyacentes. Un polígono cóncavo simple tiene al menos un ángulo interior que es un ángulo reflejo. En geometría euclidiana , las medidas de los ángulos interiores de un triángulo suman π radianes, 180 ° o 1/2 vuelta; las medidas de los ángulos interiores de un cuadrilátero convexo simple suman 2 π radianes, 360 ° o 1 vuelta. En general, las medidas de los ángulos interiores de un polígono convexo simple con n lados suman (n - 2)π radianes, o ( n - 2) 180 grados, ( n - 2) 2 ángulos rectos o ( n - 2) 1/ 2 vuelta.
- El suplemento de un ángulo interior se denomina ángulo exterior (formado por un lado y la prolongación del lado adyacente), es decir, un ángulo interior y un ángulo exterior forman un par lineal de ángulos. Hay dos ángulos exteriores en cada vértice del polígono, cada uno determinado al extender uno de los dos lados del polígono que se encuentran en el vértice; estos dos ángulos son verticales y, por tanto, son iguales. Un ángulo exterior mide la cantidad de rotación que uno tiene que hacer en un vértice para trazar el polígono.[7] Si el ángulo interior correspondiente es un ángulo reflejo, el ángulo exterior debe considerarse negativo. Incluso en un polígono no simple, puede ser posible definir el ángulo exterior, pero habrá que elegir una orientación del plano (o superficie) para decidir el signo de la medida del ángulo exterior.
- En geometría euclidiana, la suma de los ángulos exteriores de un polígono convexo simple, si solo se supone uno de los dos ángulos exteriores en cada vértice, será una vuelta completa (360 °). El ángulo exterior aquí se llama «ángulo exterior suplementario». Los ángulos exteriores se usan comúnmente en los programas de Logo Turtle al dibujar polígonos regulares.
- En un triángulo, las bisectrices de dos ángulos exteriores y la bisectriz del otro ángulo interior son concurrentes (se encuentran en un solo punto). [8]
- En un triángulo, tres puntos de intersección, cada uno de una bisectriz de ángulo externo con el lado extendido opuesto, son colineales. [8]
- En un triángulo, tres puntos de intersección, dos de ellos entre una bisectriz de ángulo interior y el lado opuesto, y el tercero entre la otra bisectriz de ángulo exterior y el lado opuesto extendido, son colineales. [8]: p. 149
- Algunos autores usan el nombre de ángulo exterior de un polígono simple para referirse simplemente al ángulo exterior del complemento (¡ no al complemento!) del ángulo interior.[9] Esto entra en conflicto con el uso anterior.
Ángulos respecto de una circunferencia
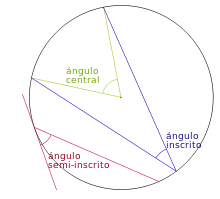

Un ángulo, respecto de una circunferencia, pueden ser:
Ángulo central, si tiene su vértice en el centro de esta.
- La amplitud de un ángulo central es igual a la del arco que abarca.
Ángulo inscrito, si su vértice es un punto de la circunferencia y sus lados la cortan en dos puntos.
- La amplitud de un ángulo inscrito es la mitad de la del arco que abarca. (Véase: arco capaz.)
Ángulo semi-inscrito, si su vértice está sobre esta, uno de sus lados la corta y el otro es tangente, siendo el punto de tangencia el propio vértice.
- La amplitud de un ángulo semi-inscrito es la mitad de la del arco que abarca.
Ángulo interior, si su vértice está en el interior de la circunferencia.
- La amplitud de un ángulo interior es la mitad de la suma de dos medidas: la del arco que abarcan sus lados más la del arco que abarcan sus prolongaciones.
Ángulo exterior, si tiene su vértice en el exterior de esta.
- La amplitud de un ángulo exterior es la mitad de la diferencia de los dos arcos que abarcan sus lados sobre dicha circunferencia.
Trisección del ángulo
La trisección del ángulo es un problema clásico que consiste en dividir un ángulo dado en tres partes iguales usando solo regla y compás. En general, es imposible de resolver con esas condiciones.
Ángulos tridimensionales
- El ángulo diedro, es cada una de las dos partes del espacio delimitadas por dos semiplanos que parten de una recta común,
- El ángulo sólido, es la zona del espacio delimitada por una superficie cónica.
Coordenadas angulares tridimensionales
- Los ángulos de Euler son tres coordenadas angulares que indican la orientación de un sistema de referencia de ejes ortogonales, normalmente móvil, respecto a otro fijo.
Ángulos en un espacio vectorial
Dado un espacio vectorial, cuyo cuerpo es el conjunto de los números reales y en el que existe un producto escalar entre vectores , se define el ángulo formado por dos vectores no nulos e mediante la expresión:
Si el cociente anterior es 0, se dice que ambos vectores son ortogonales o perpendiculares. El cociente anterior está en el intervalo debido a la desigualdad de Cauchy-Schwarz, lo que garantiza que siempre puede aplicarse el arcocoseno. Normalmente, se toma la rama del arcocoseno de forma que el ángulo que forman dos vectores siempre está en el intervalo (geométricamente, se elige el menor de los ángulos que forman dos vectores). Las principales propiedades que cumple el ángulo de dos vectores son las siguientes:





![{\displaystyle [0,\pi ]}](../I/3e2a912eda6ef1afe46a81b518fe9da64a832751.svg)
- Si multiplicamos uno de los vectores por un escalar positivo, el ángulo no cambia.
- Si multiplicamos uno de los vectores por un escalar negativo, el ángulo pasa a ser el complementario.
- Se cumple el teorema del coseno, es decir, dados e no nulos,
.

Galería de ángulos
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 | |||||

























Medición de ángulos
El tamaño de un ángulo geométrico se suele caracterizar por la magnitud de la menor rotación que mapea uno de los rayos en el otro. Se dice que los ángulos que tienen el mismo tamaño son iguales o congruentes o de igual medida.
En algunos contextos, como la identificación de un punto en un círculo o la descripción de la orientación de un objeto en dos dimensiones con respecto a una orientación de referencia, los ángulos que difieren en un múltiplo exacto de una vuelta completa son efectivamente equivalentes. En otros contextos, como la identificación de un punto en una curva espiral o la descripción de la rotación acumulada de un objeto en dos dimensiones con respecto a una orientación de referencia, los ángulos que difieren en un múltiplo no nulo de una vuelta completa no son equivalentes.

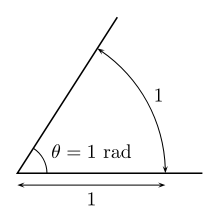
Para medir un ángulo θ, se traza un arco de circunferencia centrado en el vértice del ángulo, por ejemplo, con un compás. El cociente de la longitud s del arco por el radio r del círculo es el número de radianes del ángulo. Convencionalmente, en matemáticas y en el SI, el radián se trata como si fuera igual al valor adimensional 1.
El ángulo expresado en otra unidad angular puede obtenerse entonces multiplicando el ángulo por una constante de conversión adecuada de la forma k2π, donde k es la medida de una vuelta completa expresada en la unidad elegida (por ejemplo, k = 360° para grados o 400 grad para gradianes):

El valor de θ así definido es independiente del tamaño del círculo: si se cambia la longitud del radio, entonces la longitud del arco cambia en la misma proporción, por lo que la relación s/r no se altera.[nb 1]
Postulado de adición de ángulos
El postulado de adición de ángulos establece que si B está en el interior del ángulo AOC, entonces

La medida del ángulo AOC es la suma de la medida del ángulo AOB y la medida del ángulo BOC.
Unidades
Las unidades utilizadas para representar ángulos se enumeran a continuación en orden de magnitud descendente. De estas unidades, el grado y el radián son, con mucho, las más utilizadas. Los ángulos expresados en radianes son adimensionales para el análisis dimensional.
La mayoría de las unidades de medida angular se definen de forma que un giro (es decir, un círculo completo) es igual a n unidades, para algún número entero n. Las dos excepciones son el radián (y sus submúltiplos decimales) y la parte del diámetro.
- Giro (n = 1)
- El giro, también ciclo, círculo completo, revolución, y rotación, es movimiento circular completo o medida (como volver al mismo punto) con círculo o elipse. Los símbolos utilizados y el giro son cyc, rev, o rot, dependiendo de la aplicación.
- Cuadrante (n= 4)
- El cuadrante es un 14 giro, es decir, un ángulo recto. Es la unidad utilizada en los Elementos de Euclides. 1 cuadrante = 90° = Π2 rad = 14 giro = 100 grad. En alemán se ha utilizado el símbolo ∟ para denotar un cuadrante.
- Sextante (n = 6)
- El sextante (ángulo del triángulo equilátero) es de 16 giro. Era la unidad utilizada por los babilonios,[11][12] y es especialmente fácil de construir con regla y compás. El grado, el minuto de arco y el segundo de arco son subunidades sexagesimales de la unidad babilónica. 1 unidad babilónica = 60° = Π/3 rad ≈ 1,047197551 rad.
- Radianes (n = 2(Π) = 6.283...)
- El radián es el ángulo subtendido por un arco de círculo que tiene la misma longitud que el radio del círculo. El símbolo del radián es rad. Una vuelta es 2Π radianes, y un radián es 180°Π, o unos 57,2958 grados. En los textos matemáticos, los ángulos suelen tratarse como adimensionales con el radián igual a uno, por lo que la unidad rad suele omitirse. El radián se utiliza prácticamente en todos los trabajos matemáticos más allá de la simple geometría práctica, debido, por ejemplo, a las propiedades agradables y «naturales» que presentan las funciones trigonométricas cuando sus argumentos están en radianes. El radián es la unidad (derivada) de medida angular en el SI, que también trata el ángulo como adimensional.
- Ángulo horario (n = 24)
- El ángulo horario astronómico es 124 de vuelta. Como este sistema es susceptible de medir objetos que tienen un ciclo diario (como la posición relativa de las estrellas), las subunidades sexagesimales se llaman minuto de tiempo y segundo de tiempo. Son distintas y 15 veces mayores que los minutos y segundos de arco. 1 hora = 15° = Π12 rad = 16 quad = 124 vuelta = 1623 grad.
- Puntos del compás (n= 32)
- El punto, utilizado en navegación, es 132 de un giro. 1 punto = 18 de un ángulo recto = 11,25° = 12,5 grados. Cada punto se subdivide en cuatro cuartos de punto, de modo que 1 vuelta equivale a 128 cuartos de punto.
- Hexacontada (n = 60)
- La hexacontada es una unidad que utilizaba Eratóstenes y equivale a 6°, por lo que una vuelta entera se dividía en 60 hexacontadas.
- Pechus (n = 144–180)
- El pechus era una unidad babilónica equivalente a unos 2° o 212°.
- Grado binario (n = 256)
- El grado binario, también conocido como el radián binario (o brad), es el 1256 de un giro.[13] El grado binario se utiliza en computación para que un ángulo pueda ser representado eficientemente en un solo byte (aunque con una precisión limitada). Otras medidas de ángulo utilizadas en computación pueden basarse en dividir una vuelta entera en 2n partes iguales para otros valores de n.[14]
- Grado (n = 360)
- El grado sexagesimal o simplemente grado, denotado por un pequeño círculo superíndice (°), es 1/360 de una vuelta, por lo que una vuelta es 360°. El caso de los grados para la fórmula dada anteriormente, un grado de n = 360° unidades se obtiene estableciendo k = 360°2Π. Una ventaja de esta antigua subunidad sexagesimal es que muchos ángulos comunes en la geometría simple se miden como un número entero de grados. Las fracciones de un grado pueden escribirse en notación decimal normal (por ejemplo, 3,5° para tres grados y medio), pero las subunidades sexagesimales «minuto» y «segundo» del sistema «grado-minuto-segundo» también se utilizan, especialmente para las coordenadas geográficas y en astronomía y balística.
- Parte del diámetro (n = 376,99...)
- La parte de diámetro (usada ocasionalmente en las matemáticas islámicas) es 160 de un radián. Una parte de diámetro es aproximadamente 0,95493°. Hay aproximadamente 376,991 partes de diámetro por vuelta.
- Grad (n= 400)
- El grad, también llamado grado centesimal, gradian, gon o gonio, es 1400 de un giro, por lo que un ángulo recto mide 100 grads. Es una subunidad decimal del cuadrante. Un kilómetro se definía históricamente como la longitud del arco subtendiendo por una centésima de gradián a lo largo de un meridiano de la Tierra. Así, el kilómetro es el análogo decimal a la sexagesimal milla náutica.[cita requerida] El grado se utiliza sobre todo en triangulación y topografía continental.
- Milirradio
- El milirradio (mrad, a veces mil) se define como la milésima parte de un radián, lo que significa que una rotación de un vuelta consiste en 2000Π mrad (o aproximadamente 6283,185... mrad), y casi todas las miras para armas de fuego están calibradas con esta definición. Además, existen otras tres definiciones derivadas utilizadas para la artillería y la navegación que son aproximadamente iguales a un milirradio. Según estas otras tres definiciones, una vuelta equivale exactamente a 6000, 6300 o 6400 mrad, lo que equivale a abarcar el rango de 0,05625 a 0,06 grados (3,375 a 3,6 minutos). En comparación, el milirradio verdadero es de 0,05729578... grados (3,43775... minutos). Un «OTAN mil» (unidad utilizada por la Alianza Atlántica en cartografía y artillería) se define como 16400 de una vuelta. Al igual que con el milirradián verdadero, cada una de las otras definiciones explota la práctica propiedad de subtensiones del mil, es decir, que el valor de un milirradián equivale aproximadamente al ángulo subtendido por un ancho de 1 metro visto desde 1 km de distancia (2Π6400 = 0,0009817... ≈ 11000).
- Arcominuto (n = 21,600)
- El arcominuto (o minuto de arco, o simplemente minuto) es 160 de un grado = 121,600 de giro. Se denota con un solo primo ( ′ ). Por ejemplo, 3° 30′ es igual a 3 × 60 + 30 = 210 minutos o 3 + 3060 = 3,5 grados. También se utiliza a veces un formato mixto con fracciones decimales, por ejemplo, 3° 5.72′ = 3 + 5.7260 grados. Una milla náutica se definía históricamente como un minuto de arco a lo largo de un gran círculo de la Tierra.
- Arcosegundo (n = 1,296,000)
- El arcosegundo (o segundo de arco, o simplemente segundo) es 160 de un minuto de arco y 13600 de un grado. Se denota por un doble primo ( ″ ). Por ejemplo, 3° 7′ 30″ es igual a 3 + 760 + 303600 grados, o 3,125 grados.
- Miliarcosegundo (n = 1,296,000,000)
- En particular, el miliarcosegundo, abreviado como mas, se utiliza a veces en astronomía.
- Microarcosegundo (n = 1,296,000,000,000)
- De forma similar, el microarcosegundo, abreviado como µas se empela en mediciones angulares de alta precisión.
Véase también
Notas
- Este enfoque requiere, sin embargo, una prueba adicional de que la medida del ángulo no se modifica con el cambio del radio r, además de la cuestión de las "unidades de medida elegidas". Un enfoque más suave es medir el ángulo por la longitud del arco de círculo unitario correspondiente. Aquí se puede elegir que la "unidad" sea adimensional en el sentido de que es el número real 1 asociado al segmento unitario en la recta real. Véase, por ejemplo, Radoslav M. Dimitrić.[10]
Referencias
- «Ángulos». descartes.cnice.mec.es. Consultado el 17 de octubre de 2010.
- Slocum, 2007
- Chisholm, 1911
- Heiberg, 1908, pp. 177-178
- Real Academia de Ciencias Exactas, Física y Naturales, ed. (1999). Diccionario esencial de las ciencias. Espsa. ISBN 84-239-7921-0.
- Diccionario esencial de las ciencias. Espasa. ISBN 84-239-7921-0.
- Henderson y Taimina, 2005, p. 104.
- Johnson, Roger A. Advanced Euclidean Geometry, Dover Publications, 2007.
- D. Zwillinger, ed. (1995), CRC Standard Mathematical Tables and Formulae, Boca Raton, FL: CRC Press, p. 270. as cited in Weisstein, Eric W. «Exterior Angle». En Weisstein, Eric W, ed. MathWorld (en inglés). Wolfram Research.
- Dimitrić, Radoslav M. (2012). «On Angles and Angle Measurements». The Teaching of Mathematics XV (2): 133-140. Archivado desde el original el 17 de enero de 2019. Consultado el 6 de agosto de 2019.
- Jeans, James Hopwood (1947). The Growth of Physical Science. CUP Archive. p. 7.
- Murnaghan, Francis Dominic (1946). Analytic Geometry. p. 2.
- «ooPIC Programmer's Guide - Chapter 15: URCP». ooPIC Manual & Technical Specifications - ooPIC Compiler Ver 6.0. Savage Innovations, LLC. 2007 (1ª ed. 1997). Archivado desde el original el 28 de junio de 2008. Consultado el 5 de agosto de 2019.
- Hargreaves, Shawn. «Angles, integers, and modulo arithmetic». blogs.msdn.com. Archivado desde el original el 30 de junio de 2019. Consultado el 5 de agosto de 2019.
Bibliografía
- Henderson, David W.; Taimina, Daina (2005), Experiencing Geometry / Euclidean and Non-Euclidean with History (3rd edición), Pearson Prentice Hall, p. 104, ISBN 978-0-13-143748-7.
- Heiberg, Johan Ludvig (1908), Heath, T. L., ed., Euclid, The Thirteen Books of Euclid's Elements 1, Cambridge: Cambridge University Press..
- Jacobs, Harold R. (1974), Geometry, W. H. Freeman, pp. 97, 255, ISBN 978-0-7167-0456-0.
- Slocum, Jonathan (2007), Preliminary Indo-European lexicon — Pokorny PIE data, University of Texas research department: linguistics research center, archivado desde el original el 27 de junio de 2010, consultado el 2 de febrero de 2010.
- Shute, William G.; Shirk, William W.; Porter, George F. (1960), Plane and Solid Geometry, American Book Company, pp. 25-27.
- Wong, Tak-wah; Wong, Ming-sim (2009), «Angles in Intersecting and Parallel Lines», New Century Mathematics, 1B (1 edición), Hong Kong: Oxford University Press, pp. 161-163, ISBN 978-0-19-800177-5.
![]() Este artículo incorpora texto de una publicación sin restricciones conocidas de derecho de autor:
Este artículo incorpora texto de una publicación sin restricciones conocidas de derecho de autor: ![]() Varios autores (1910-1911). «Angle». En Chisholm, Hugh, ed. Encyclopædia Britannica. A Dictionary of Arts, Sciences, Literature, and General information (en inglés) (11.ª edición). Encyclopædia Britannica, Inc.; actualmente en dominio público.
Varios autores (1910-1911). «Angle». En Chisholm, Hugh, ed. Encyclopædia Britannica. A Dictionary of Arts, Sciences, Literature, and General information (en inglés) (11.ª edición). Encyclopædia Britannica, Inc.; actualmente en dominio público.
Enlaces externos
 Wikimedia Commons alberga una categoría multimedia sobre ángulos.
Wikimedia Commons alberga una categoría multimedia sobre ángulos.- Weisstein, Eric W. «Ángulo». En Weisstein, Eric W, ed. MathWorld (en inglés). Wolfram Research.
| Control de autoridades |
|
|---|
 Datos: Q11352
Datos: Q11352- Multimedia: Angles (geometry) / Q11352