Máquina simple
Una máquina simple es un dispositivo mecánico que cambia la dirección o la magnitud de una fuerza.[2][3][4][5]
Desde los albores de la Revolución Industrial hasta la actualidad, la concepción teórica de las máquinas ha evolucionado de forma considerable. Sin embargo, el concepto clásico de máquina simple sigue manteniendo su vigencia, tanto por su significación histórica, como por ser un valioso elemento didáctico utilizado ampliamente en la enseñanza de algunas nociones básicas de la física.[6] Por otro lado, numerosos mecanismos sencillos basados en las máquinas simples siguen siendo generalmente utilizados para la producción artesanal.[7]
Las máquinas simples clásicas
De acuerdo con la clasificación tradicional, las seis máquinas simples son:
| Las seis máquinas simples clásicas: | ||||||
|---|---|---|---|---|---|---|
|




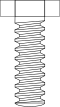
Palanca
| Tipos de palanca: | ||
 |  |  |
| 1.ª Clase | 2ª Clase | 3ª Clase |
- La palanca es una barra rígida con un punto de apoyo, llamado fulcro, a la que se aplica una fuerza y que, girando sobre el punto de apoyo, vence una resistencia. Se cumple la conservación de la energía y, por lo tanto, la fuerza aplicada por su espacio recorrido ha de ser igual a la fuerza de resistencia por su espacio recorrido.
Torno o Rueda
- Es un dispositivo mecánico generalmente utilizado para mover verticalmente grandes pesos. Está formado por una cuerda de la que se fija uno de los extremos a la carga a desplazar y el otro extremo a un cilindro que es a su vez fijado de tal manera que solo puede rotar en torno a su eje principal. Actuando el cilindro con una manivela la cuerda se enrolla sobre él, consiguiendo subir la carga.
Polea
- Es un aparato mecánico de tracción constituido por una rueda acanalada o roldana por donde pasa una cuerda, lo que permite transmitir una fuerza en una dirección diferente a la aplicada. Además, formando aparejos o polipastos de dos o más poleas es posible también aumentar la magnitud de la fuerza transmitida para mover objetos pesados, a cambio de la reducción del desplazamiento producido.
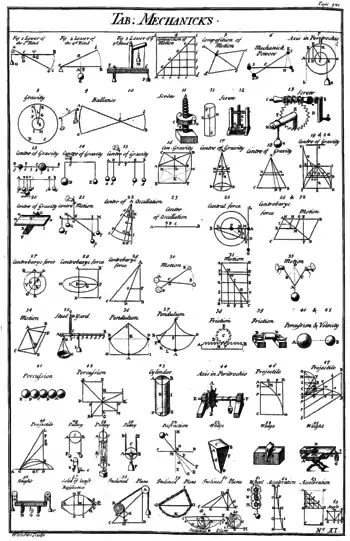
Plano inclinado
- En el plano inclinado se aplica una fuerza para vencer la resistencia vertical del peso del objeto a levantar. Dado el principio de conservación de la energía, cuanto más pequeño sea el ángulo del plano inclinado, más peso se podrá elevar con la misma fuerza aplicada, pero a cambio, la distancia a recorrer será mayor.
Cuña
- La cuña transforma una fuerza aplicada a su extremo romo en dos fuerzas perpendiculares a la primera y de sentido contrario entre ellas. El ángulo de la cuña determina la proporción entre la fuerza aplicada y las resultantes, de un modo parecido al plano inclinado. Es el caso de hachas o cuchillos.[8]
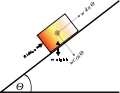
Tornillo
- El mecanismo transforma un movimiento giratorio aplicado a un volante o manilla, en otro rectilíneo en el husillo, mediante un mecanismo de tornillo y tuerca. La fuerza aplicada por la longitud de la circunferencia del volante ha de ser igual a la fuerza resultante por el avance del husillo. Dado el gran desarrollo de la circunferencia y el normalmente pequeño avance del husillo, la relación entre las fuerzas es muy grande. Herramientas como el gato del coche o el sacacorchos derivan del funcionamiento del tornillo.
Pese al carácter tradicional de la lista anterior, no es infrecuente encontrar otras listas que incluyan algún elemento mecánico distinto. Por ejemplo, algunos autores consideran a la cuña y al tornillo como aplicaciones del plano inclinado; otros incluyen a la rueda como una máquina simple; otros consideran los engranajes; o también se considera el eje con ruedas una máquina simple, aunque sea el resultado de juntar otras dos máquinas simples.[9]
Características
Una máquina simple utiliza una única fuerza aplicada transformándola en una fuerza resultante, que realiza un trabajo desplazando una sola carga (o venciendo una fuerza resistente). Si se omiten las pérdidas por rozamiento, el trabajo realizado por la fuerza aplicada es igual al trabajo realizado por la fuerza resultante sobre la carga. La máquina puede aumentar la magnitud de la fuerza aplicada a lo largo de una determinada distancia (al transformarla en la fuerza resultante), pero a costa de una disminución proporcional en la distancia recorrida por la carga. La relación entre la fuerza aplicada y la fuerza resultante se denomina ventaja mecánica.
Las máquinas simples pueden ser consideradas como los "bloques de construcción" elementales a partir de los que se diseñan máquinas más complejas (denominadas en ocasiones "máquinas compuestas"[10][11][4][12] como por ejemplo, el mecanismo de una bicicleta, donde se utilizan ruedas, palancas y poleas).[13] La ventaja mecánica de una máquina compuesta es el producto de las ventajas mecánicas de las máquinas simples de las que está compuesta.
Historia

La idea de la máquina simple se originó alrededor del siglo III a. C. por el físico griego Arquímedes, que estudió la palanca, la polea, y el tornillo.[4][15] Descubrió el principio de ventaja mecánica, reflejada en la famosa frase tradicionalmente atribuida[16] a Arquímedes con respecto a la palanca: "Dame un punto de apoyo, y moveré la Tierra." (en griego: "Δώσε μου ένα σημείο υποστήριξης, και θα μετακινήσω τη Γη.")[17] con la que expresaba su comprensión de que no hay límite a la cantidad de amplificación de la fuerza que se podría lograr mediante el uso de la ventaja mecánica, concepto que extendió a la polea y el tornillo,[15] describiendo su fabricación y usos.[18] Sin embargo, la comprensión de los griegos se limitaba a la estática de las máquinas simples (el equilibrio de fuerzas); y no incluía la consideración de efectos dinámicos, el equilibrio entre la fuerza y la distancia, o el concepto de trabajo mecánico.
Durante el Renacimiento la dinámica de las potencias mecánicas, como fueron llamadas las máquinas simples, comenzó a ser estudiada desde el punto de vista de lo lejos que se podía izar una carga, o de la fuerza que se podía aplicar. Esto condujo finalmente al nuevo concepto de trabajo mecánico. En 1586, el ingeniero flamenco Simon Stevin dedujo la ventaja mecánica del plano inclinado, lo que llevó a incluirlo con las otras máquinas simples. La teoría dinámica completa de las máquinas simples fue elaborada por el científico italiano Galileo Galilei en 1600 en su obra Le Meccaniche (Sobre la mecánica), en la que mostraba la similitud matemática subyacente de las distintas máquinas.[19][20] Fue el primero en comprender que las máquinas simples no crean energía, sino que solamente la transforman.[19]
Las reglas clásicas de la fricción por deslizamiento en las máquinas fueron descubiertas por Leonardo da Vinci (1452-1519), pero no las incluyó en sus cuadernos. Fueron redescubiertas por Guillaume Amontons (1699) y desarrolladas por Charles-Augustin de Coulomb (1785).[21]
La mecánica moderna ha ampliado la noción sobre las máquinas simples, que describían de forma demasiado sucinta la gran variedad de máquinas complejas que surgieron a partir de la Revolución Industrial. Desde el siglo XIX, distintos autores han compilado listas ampliadas de "máquinas simples", a menudo utilizando términos como máquinas básicas,[13] máquinas compuestas,[10] o elementos de una máquina, para distinguirlas de las máquinas simples clásicas anteriores. A finales de 1800, Franz Reuleaux[22] había identificado cientos de mecanismos elementales, que calificaba como máquinas simples. Representaciones del diseño (KMODDL) de estos dispositivos se pueden encontrar en los modelos cinemáticos de la página web de la Universidad de Cornell.[23]
(Véase: Enlace al catálogo de mecanismos de Cornell)
 |
 |
 |
 |
 |
 |
| Máquinas simples (Johann Sturm, 1676) | |||||
A partir de 1970, con la progresiva generalización de las tecnologías digitales, se han desarrollado numerosas herramientas de diseño asistido por computadora (Autodesk Inventor, SolidWorks, Pro/ENGINEER, CATIA y Solid Edge están entre las de mayor difusión) que incluyen en sus rutinas la modelización de diversos mecanismos, permitiendo visualizar de forma virtual el comportamiento cinemático de los dispositivos diseñados.
Análisis mecánico

_puits_avec_levier.jpg.webp)
A pesar de que cada tipo de máquina simple funciona de una manera distinta desde el punto de vista mecánico, desde el punto de vista analítico todas se rigen por las mismas ecuaciones matemáticas.[24] Siendo esto cierto, desde el punto de vista teórico se puede analizar su funcionamiento de dos maneras distintas: sin considerar la fricción (máquinas ideales) y considerándola (máquinas reales).
También se analiza el funcionamiento de las máquinas compuestas, como montajes de series de máquinas simples.
Máquinas ideales
Cuando no se considera el efecto de las pérdidas por fricción sobre el funcionamiento de una máquina simple, entonces se está hablando de máquinas ideales.
Una fuerza se aplica al dispositivo en un momento dado, y realiza un trabajo al mover una carga en otro punto.[25] Aunque algunas máquinas solo cambian la dirección de la fuerza, tal como hace una polea simple, la mayoría de las máquinas multiplican la magnitud de la fuerza por un factor, la ventaja mecánica



que se puede calcular a partir de la geometría (y en su caso, de la fricción) de la máquina.
Las máquinas simples no poseen una fuente propia de energía (al contrario que los motores),[26] por lo que no pueden realizar más trabajo mecánico que el que reciben mediante la fuerza aplicada.[25] Una máquina simple en la que se puedan despreciar los efectos de la fricción y de la elasticidad de los materiales, se denomina una máquina ideal.[27][28][29] Debido al principio de conservación de la energía,[30] en una máquina simple ideal, la potencia producida (tasa de producción de energía) es igual a la potencia aplicada en cualquier momento:



La potencia de salida es igual a la velocidad de la carga multiplicada por la fuerza resistente de la carga . Del mismo modo, la potencia de entrada es igual a la velocidad de la fuerza aplicada multiplicada por el valor de la propia fuerza aplicada . Por lo tanto,





En consecuencia, la ventaja mecánica de una máquina ideal es igual a la relación de velocidades entre la velocidad de la fuerza aplicada y la velocidad con que se desplaza la carga:

La relación de velocidad de la máquina es también igual a la relación entre las distancias recorridas por los puntos de la carga y los puntos de la fuerza aplicada:

y se puede calcular a partir de la geometría de la máquina. Por ejemplo, la relación de velocidad de la palanca es igual a la relación entre las longitudes de sus brazos.
La ventaja mecánica puede ser mayor o menor que uno:
- Si la fuerza resultante es mayor que la aplicada, y entonces la máquina actúa como un amplificador de fuerza, pero la distancia recorrida por la carga es menor que la distancia recorrida por la fuerza aplicada .
- Si la fuerza resultante es menor que la aplicada, pero la distancia a la que la carga se desplaza es mayor que la distancia recorrida por la fuerza aplicada .




En un tornillo, en el que se usa un movimiento de rotación, la fuerza aplicada debe reemplazarse por el momento torsor, y su velocidad por la velocidad angular con la que el tornillo es girado.
Máquinas reales. Eficiencia
Todas las máquinas reales tienen rozamiento, lo que hace que parte de la potencia aplicada se disipe en forma de calor. Si es la potencia perdida por la fricción, a partir del principio de conservación de la energía se deduce que


La eficiencia de una máquina es un número entre 0 y 1 que se define como la relación entre la potencia aplicada y la potencia resultante, siendo una medida de las pérdidas de energía



Como anteriormente, la potencia es igual al producto de la fuerza por la velocidad, y entonces

Por lo tanto,

Así, en las máquinas no ideales, la ventaja mecánica es siempre igual o menor que la relación de velocidad multiplicada por la eficiencia η, de manera que una máquina en la que se considere la fricción, no será capaz de mover una carga tan grande como la máquina ideal correspondiente usando la misma fuerza de accionamiento.
Máquinas compuestas
las máquinas compuestas son un dispositivo mecánico formado a partir de un conjunto de máquinas simples conectadas en serie, de forma que la fuerza resultante de una proporciona la fuerza aplicada en la siguiente. Por ejemplo, un tornillo de banco consiste en una palanca (el mango de la prensa del tornillo) conectada en serie con un tornillo, y un reductor de velocidad consiste en un conjunto de ejes y engranajes (funcionando mecánicamente como si fueran tornos) conectados en serie.
La ventaja mecánica de una máquina compuesta es la relación entre la fuerza resultante ejercida por la última máquina de la serie, dividida por la fuerza aplicada a la primera máquina, que es

Debido a que la fuerza resultante de cada máquina es la aplicada en la siguiente, , la ventaja mecánica también viene dada por


Por lo tanto, la ventaja mecánica de la máquina compuesta es igual al producto de las ventajas mecánicas de la serie de máquinas simples que la forman

Del mismo modo, la eficiencia de una máquina compuesta es también el producto de los rendimientos de la serie de máquinas simples que la forman

Máquinas reversibles e irreversibles

En muchas máquinas simples, si la fuerza resistente de la carga Fr que opera en la máquina es lo suficientemente grande en relación con la fuerza aplicada Fa, entonces la máquina se desplaza hacia atrás, con la fuerza resistente de la carga realizando un trabajo mecánico contra la fuerza aplicada (por ejemplo, como cuando se hace descender una carga mediante un torno).[31] Por lo tanto, estas máquinas se pueden utilizar en los dos sentidos, con la fuerza de accionamiento aplicada a cualquiera de los dos extremos del dispositivo. Por ejemplo, si la fuerza de la carga sobre una palanca es lo suficientemente alta, la palanca se mueva hacia atrás, desplazando el otro brazo en dirección contraria a la de la fuerza aplicada. Estas son las denominadas máquinas reversibles , denominándose el movimiento hacia atrás reacondicionamiento. Sin embargo, en algunos tipos de máquinas, si las fuerzas de fricción son lo suficientemente altas, ninguna cantidad de fuerza de carga puede moverlas hacia atrás, incluso si la fuerza aplicada es cero. Estos dispositivos se denominan máquinas irreversibles o autoblocantes.[31] Estas máquinas solo pueden ser puestas en movimiento por la fuerza aplicada, y cuando esta fuerza cesa, la máquina permanece inmóvil, "bloqueada" por la fricción en cualquier posición en la que quede.
El auto-bloqueo se produce principalmente en aquellas máquinas con grandes superficies de contacto entre las partes que se desplazan por deslizamiento: el tornillo, el plano inclinado y la cuña:
- El ejemplo más común es el tornillo. En la mayoría de los tornillos, la aplicación de un par torsor al eje puede hacerlo girar, trabajando axialmente en sentido contrario a una carga, pero ninguna cantidad de carga axial contra el eje hará que gire hacia atrás.
- En un plano inclinado, una carga se puede elevar arrastrándola sobre el plano mediante la aplicación de una fuerza lateral, pero si el plano no es demasiado pendiente y hay suficiente fricción entre la carga y el plano, cuando la fuerza aplicada cesa, la carga permanecerá inmóvil y no se deslizará hacia abajo del plano, independientemente de su peso.
- Una cuña puede ser introducida en un bloque de madera aplicando una fuerza en su extremo romo (golpeándola con un mazo, por ejemplo) obligando a separarse los dos lados de la madera, pero ninguna cantidad de fuerza de compresión de la madera sobre la cuña hará que salte de nuevo fuera del bloque.
Una máquina será irreversible si y solo si su eficiencia η está por debajo del 50 %:[31]

Que una máquina sea irreversible (o autoblocante) depende tanto de las fuerzas de fricción (coeficiente de rozamiento) entre sus partes, como de la relación de distancia da / dr (ventaja mecánica ideal). Si la combinación de la fricción y de la ventaja mecánica ideal es lo suficientemente alta, la máquina será irreversible.
Demostración
Cuando una máquina se mueve en la dirección de avance del punto 1 al punto 2, con la fuerza aplicada trabajando contra la fuerza resistente de la carga, por el principio de conservación de energía[32][33] se tiene que el trabajo aplicado es igual a la suma del trabajo realizado sobre la fuerza de carga y al trabajo perdido debido a la fricción




Si la eficiencia está por debajo del 50%


De 1)


Cuando la máquina se mueve hacia atrás desde el punto 2 al punto 1, la fuerza de carga hace el trabajo sobre la fuerza de entrada, siendo el trabajo perdido por la fricción el mismo

Y, por lo tanto, el trabajo de salida es

En consecuencia, las máquinas irreversibles lo son, porque el trabajo que se disipa debido a la fricción es mayor que el trabajo realizado por la fuerza de carga intentando mover la máquina hacia atrás, incluso sin una fuerza aplicada.
Teoría de máquinas moderna
Cadenas cinemáticas

Las máquinas simples son ejemplos elementales de cadenas cinemáticas que se utilizan para modelizar máquinas que van desde la máquina de vapor a los robots manipuladores. Los cojinetes que forman el punto de apoyo de una palanca y que permiten girar a ruedas y poleas sobre sus ejes son ejemplos de pares cinemáticos, formando una junta articulada. Del mismo modo, la superficie de un plano inclinado y la cuña son ejemplos de un par cinemático denominado junta deslizante. El tornillo se identifica generalmente como un tipo propio de par cinemático, denominado unión helicoidal.
Dos palancas o manivelas, se combinan en un mecanismo de cuatro barras plano, uniendo un enlace que conecta la salida de una manivela con la entrada de otra. Enlaces adicionales pueden conectarse para formar un simple mecanismo de seis barras, o en combinaciones tan complejas como las necesarias para diseñar un robot.[28]
Clasificación de las máquinas
La identificación de las máquinas simples surge del deseo de disponer de un método sistemático para inventar nuevas máquinas. Por lo tanto, un objetivo importante es conocer cómo las máquinas simples se combinan para formar máquinas más complejas. Un enfoque consiste en adjuntar máquinas simples en serie para obtener máquinas compuestas.
Sin embargo, un planteamiento más fructífero fue ideado por Franz Reuleaux, que recogió y estudió más de 800 máquinas elementales. Se dio cuenta de que la palanca; la polea; y la rueda y el eje; son, en esencia, el mismo dispositivo: un cuerpo que gira alrededor de una articulación. Del mismo modo, el plano inclinado, la cuña, y el tornillo, hacen deslizar un bloque sobre la superficie de un plano.[34]
Esta idea muestra que son las articulaciones o las conexiones las que proporcionan el movimiento al sistema mecánico, y que, por lo tanto, son los elementos principales de las máquinas. A partir de cuatro tipos de articulaciones mecánicas (la articulación cilíndrica, la rótula deslizante, la rótula fija y la rótula esférica) y de las conexiones relacionadas tales como cables y cintas, es posible entender una máquina como un conjunto de partes sólidas conectadas por estos tipos de juntas.[28]
Actualmente, numerosas aplicaciones de diseño asistido por computadora permiten modelizar mecanismos complejos de forma virtual, lo que facilita el análisis de su funcionamiento, evitando la necesidad de fabricar prototipos en taller para su evaluación previa.[35]
Véase también
Referencias
- Chambers, Ephraim (1728), «Table of Mechanicks», Cyclopædia, A Useful Dictionary of Arts and Sciences (London, England), Volume 2: 528, Plate 11..
- Google books
- Paul, Akshoy; Roy, Pijush; Mukherjee, Sanchayan (2005), Mechanical sciences: engineering mechanics and strength of materials, Prentice Hall of India, p. 215, ISBN 81-203-2611-3..
- Asimov, Isaac (1988), Understanding Physics, New York, New York, USA: Barnes & Noble, p. 88, ISBN 0-88029-251-2..
- William Ballantyne (1914). Physics for Technical Students: Mechanics and Heat. New York, USA: McGraw Hill. pp. 112-122. Consultado el 11 de mayo de 2008.
- CEJAROSU (2005). «MecanESO». Consultado el 25 de septiembre de 2016. "Estudio de la palanca". Ejemplo de página web educativa.
- Institut filosofii (Akademiia nauk SSSR), Fedor Vasilievich Konstantinov (1957). El materialismo histórico. Editorial Grijalbo. Consultado el 27 de agosto de 2019.
- «Wedges and screws». web.archive.org. 16 de octubre de 2007. Archivado desde el original el 16 de octubre de 2007. Consultado el 25 de mayo de 2022.
- Actforlibraries.org. «Understanding the five most Important Simple Machines» (en inglés). Consultado el 25 de septiembre de 2016.
- Compound machines, University of Virginia Physics Department, archivado desde el original el 3 de agosto de 2019, consultado el 11 de junio de 2010..
- Usher, Abbott Payson (1988). A History of Mechanical Inventions. USA: Courier Dover Publications. p. 98. ISBN 0-486-25593-X.
- Wallenstein, Andrew (June 2002). «Foundations of cognitive support: Toward abstract patterns of usefulness». Proceedings of the 9th Annual Workshop on the Design, Specification, and Verification of Interactive Systems. Springer. p. 136. Consultado el 21 de mayo de 2008.
- Prater, Edward L. (1994), Basic machines, U.S. Navy Naval Education and Training Professional Development and Technology Center, NAVEDTRA 14037..
- Chiu, Y. C. (2010), An introduction to the History of Project Management, Delft: Eburon Academic Publishers, p. 42, ISBN 90-5972-437-2.
- Ostdiek, Vern; Bord, Donald (2005). Inquiry into Physics. Thompson Brooks/Cole. p. 123. ISBN 0-534-49168-5. Consultado el 22 de mayo de 2008.
- Citado por Pappus de Alejandría en su obra Sinagoga, Libro VIII
- Strizhak, Viktor; Igor Penkov; Toivo Pappel (2004). «Evolution of design, use, and strength calculations of screw threads and threaded joints». HMM2004 International Symposium on History of Machines and Mechanisms. Kluwer Academic publishers. p. 245. ISBN 1-4020-2203-4. Consultado el 21 de mayo de 2008.
- Krebs, Robert E. (2004). Groundbreaking Experiments, Inventions, and Discoveries of the Middle Ages. Greenwood Publishing Group. p. 163. ISBN 0-313-32433-6. Consultado el 21 de mayo de 2008.
- Stephen, Donald; Lowell Cardwell (2001). Wheels, clocks, and rockets: a history of technology. USA: W. W. Norton & Company. pp. 85-87. ISBN 0-393-32175-4.
- Armstrong-Hélouvry, Brian (1991). Control of machines with friction. USA: Springer. p. 10. ISBN 0-7923-9133-0.
- Reuleaux, F. (1963) [1876], The kinematics of machinery (translated and annotated by A.B.W. Kennedy), New York, New York, USA: reprinted by Dover..
- Cornell University, Reuleaux Collection of Mechanisms and Machines at Cornell University, Cornell University..
- Esta idea fundamental era el tema principal de la obra de Galileo Galilei de 1600 titulada Le Meccaniche
- Bhatnagar, V. P. (1996). A Complete Course in Certificate Physics. India: Pitambar Publishing. pp. 28-30. ISBN 8120908686.
- Simmons, Ron; Cindy Barden (2008). Discover! Work & Machines. USA: Milliken Publishing. p. 29. ISBN 1429109475.
- Gujral, I. S. (2005). Engineering Mechanics. Firewall Media. pp. 378-380. ISBN 8170086361.
- Uicker, Jr., John J.; Pennock, Gordon R.; Shigley, Joseph E. (2003), Theory of Machines and Mechanisms (third edición), New York: Oxford University Press, ISBN 978-0-19-515598-3.
- Paul, Burton (1979), Kinematics and Dynamics of Planar Machinery, Prentice Hall, ISBN 978-0-13-516062-6.
- Paul Allen Tipler (1991). «6.5». Física preuniversitaria (1 edición). Editorial Reverte. p. 1154. ISBN 9788429143751.
- Gujral, I. S. (2005). Engineering Mechanics. Firewall Media. p. 382. ISBN 81-7008-636-1.
- Rao, S.; R. Durgaiah (2005). Engineering Mechanics. Universities Press. p. 82. ISBN 81-7371-543-2.
- Goyal, M. C.; G. S. Raghuvanshi (2009). Engineering Mechanics. New Delhi: PHI Learning Private Ltd. p. 202. ISBN 81-203-3789-1.
- Hartenberg, R.S. & J. Denavit (1964) Kinematic synthesis of linkages, New York: McGraw-Hill, online link from Cornell University.
- «Animated Mechanisms». Consultado el 26 de septiembre de 2016. Ejemplos de animaciones de mecanismos digitales.
Bibliografía
- JOSÉ ANTONIO FIDALGO SÁNCHEZ; MANUEL FERNÁNDEZ PÉREZ; FERNÁNDEZ NOEMÍ FERNÁNDEZ (2016). «6,1». Tecnología Industrial II (1 edición). Ediciones Paraninfo, S.A. p. 99. ISBN 978-84-283-3308-5.
- Vollrath Hopp (1994). «2.3». Fundamentos de tecnología química para formación profesional (1 edición). Editorial Reverte. p. 160. ISBN 9788429172454.
- Manuel Fernández de Fígares (1866). «11». Manual de física y nociones de química (3 edición). Imprenta libre de D, José Maria Zamora. p. 50.
- José de Odriozola (1839). Mecánica aplicada a las máquinas operando (1 edición). Imprenta del Colegio de Sordo-Mudos.
Enlaces externos
 Wikimedia Commons alberga una categoría multimedia sobre Máquina simple.
Wikimedia Commons alberga una categoría multimedia sobre Máquina simple.- Design and Technology Online.
- mples.htm Máquinas simples (enlace roto disponible en Internet Archive; véase el historial, la primera versión y la última).
- Máquinas simples
- Tipos de máquinas simples
- LAS MÁQUINAS SIMPLES
- [https://web.archive.org/web/20161130151742/http://www4.ujaen.es/~jamaroto/MAQUINAS%20SIMPLES%20Y%20COMPUESTAS.pdf INTRODUCCIÓN A LAS MÁQUINAS SIMPLES Y
| Control de autoridades |
|
|---|
 Datos: Q186713
Datos: Q186713- Multimedia: Simple machines / Q186713