Geometría diferencial de superficies
En matemáticas, la geometría diferencial de superficies propone definiciones y métodos para analizar la geometría de superficies o variedades diferenciales de dos dimensiones inmersas en variedades de Riemann y, en particular, en el espacio euclídeo.
Aquí se tratará de las superficies en .

Ecuación paramétrica de una superficie
Puesto que una superficie en es una variedad diferenciable de dimensión dos, en un entorno V de una superficie, las coordenadas de cualquier punto de V pueden escribirse en función de dos parámetros (u, v), que funcionen como sistema de coordenadas propio de la superficie:

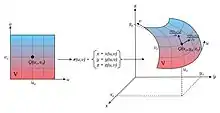
Llamaremos a esta función r carta de la superficie.
Un punto Q = (u0, v0) se llama regular si en él se cumple que los vectores tangentes en las direcciones u y v no son nulos ni paralelos, es decir, que son linealmente independientes o, equivalentemente que su producto vectorial es no nulo:

Esto es equivalente a pedir que el jacobiano de la carta r (que va desde el dominio V en a ) tenga rango máximo, es decir, sea igual a dos. Así se asegura la existencia del espacio tangente en cada punto de la superficie.

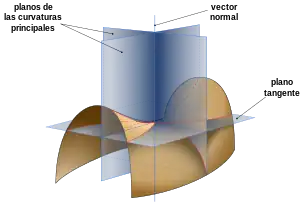
Plano tangente
Dada una superficie de y un punto se define como el único plano geométrico de que contiene al punto y que contiene a todos los vectores tangentes a la superficie en dicho punto. La ecuación analítica de este plano puede expresarse con ayuda de la ecuación paramétrica de una superficie:




Más sencillamente el plano anterior puede escribirse como el conjunto que satisface la siguiente ecuación:


Aquí, se ha usado la simplificación de notación
,... etc

Vector normal a la superficie
Un vector se dice normal a una superficie en un punto si es perpendicular al plano tangente en dicho punto de la superficie. Esa propiedad nos dice que un vector normal es perpendicular a cualquier otro vector contenido en el plano tangente. Si tomamos dos vectores diferentes y tangentes a la superficie en un punto su producto vectorial será perpendicular a ambos y por tanto perpendicular a cualquier combinación lineal de ambos, es decir, perpendicular a todo el plano generado por estos dos vectores. Podemos aprovechar esa propiedad para calcular el vector normal simplemente como el producto vectorial de los dos vectores linealmente independientes dados por la parametrización de la superficie. Así el vector normal puede calcularse como:

Si se conoce en cambio la ecuación de la superficie f(x, y, z) = 0 entonces el vector unitario normal se calcula simplemente como:

Primera forma fundamental
La primera forma fundamental I es un tensor 2-covariante, simétrico y definido sobre el espacio tangente a cada punto de la superficie S. Esta primera forma fundamental de hecho es el tensor métrico inducido por la métrica euclídea sobre la superficie. De hecho (S, I) constituye una variedad de Riemann con tensor métrico I.
Gracias a la primera forma fundamental podemos estimar longitudes de curvas definidas sobre la superficie, ángulos de intersección entre curvas y el resto de conceptos métricos habituales. Por razones históricas las componentes de la primera forma fundamental se designan por E, F y G:

Además la forma cuadrática anterior es definida positiva, lo que implica que EG-F2 > 0. La primera forma anterior puede escribirse como una combinación lineal de productos tensoriales de las 1-formas coordenadas conforme a:


Estas pueden calcularse explícitamente a partir de la parametrización:

Longitud de una curva
Dada una curva C contenida totalmente en una superficie S sus ecuaciones paramétricas podrán expresarse mediante:

La longitud de esta curva puede expresarse por una integral de las derivadas de las funciones u y v y las componentes de la primera forma fundamental:
![{\displaystyle L_{C}=\int _{C}{{\sqrt {E(u,v)[u'(t)]^{2}+2F(u,v)u'(t)v'(t)+G(u,v)[v'(t)]^{2}}}dt}}](../I/b82f08375cfd7eea99912034a84a165749028c67.svg)
Ángulo entre dos curvas
Similarmente dadas dos curvas C1 y C2 que intersecan en un punto P0 y cuyas ecuaciones paramétricas son:


El ángulo α formado por las dos curvas en el punto de intersección viene definido por la ecuación:

Donde las derivadas se evalúan para los valores de parámetro y tales que Error al representar (SVG (MathML puede ser habilitado mediante un plugin de navegador): respuesta no válida («Math extension cannot connect to Restbase.») del servidor «http://localhost:6011/es.wikipedia.org/v1/»:): {\displaystyle P_0 = \mathbf{r_1}(t_1) = \mathbf{r_2}(t_2)}
.
En particular el ángulo formado por las líneas coordenadas asociadas al sistema de coordenadas (u, v) viene dado por:


En particular el sistema de coordenadas se llama ortogonal si las líneas coordenadas son ortogonales (perpendiculares) entre sí en cada punto, eso sucede sí y solo sí F = 0.
Área de una región sobre la superficie
Dada una región Ω contenida en una superficie se define su área como:

Si la superficie viene dada por la función explícita z = f(x, y) entonces lo anterior se puede escribir sencillamente como:

Segunda forma fundamental
La segunda forma fundamental II de una superficie es la proyección sobre el vector normal a la superficie de la derivada covariante inducida por el tensor métrico o primera forma fundamental. Puede probarse, que esta segunda forma fundamental resulta ser un tensor 2-covariante y simétrico (es decir, da lugar a una forma bilineal definida sobre el espacio tangente a la superficie). Por razones históricas las componentes de la segunda forma fundamental se designan por L, M y N:

Fijado un entorno de la superficie parametrizado por las variables la segunda forma fundamental se escribe también, resultando un tensor de rango dos, como la siguiente combinación lineal:


de productos tensoriales de las 1-formas coordenadas . Las componentes de la segunda forma fundamental pueden calcularse explícitamente a partir de las coordenadas paramétricas:



Curvatura normal y geodésica
Cuando se tiene una curva sobre una superficie esta puede ser vista también como curva de a la que les son aplicables tanto las fórmulas de la geometría diferencial de curvas como las de la geometría diferencial de superficies. Eso permite relacionar la curvatura total de la curva con la curvatura de la curva vista o medida por un "habitante" de la superficie.
En concreto la curvatura total (χγ) de una curva γ(t) puede ser descompuesta entre una componente tangencial a la superficie (y medible dentro de la misma), llamada curvatura geodésica (kg), y una componente perpendicular a la superficie (que depende de cómo está curvada la superficie en el espacio y cuál es la dirección de la curva dentro de la superficie), llamada curvatura normal (kn). De hecho se cumple que:

Donde la curvatura geodésica y normal pueden calcularse a partir del ángulo que forman el vector normal a la superficie y el vector normal a la curva (nγ):

La aceleración de cualquier punto material puede ser descompuesta en aceleración tangencial y aceleración normal. Si además el punto se mueve sobre la superficie, la aceleración normal puede descomponerse en aceleración propiamente normal y aceleración geodésica (debida al seguimiento que el punto hace de la superficie):

Donde son respectivamente el vector tangente a la curva, el vector normal a la curva y el vector normal a la superficie. Esa ecuación muestra que las líneas geodésicas a la superficie son precisamente aquellas curvas para las cuales su curvatura total coincide con su curvatura normal.
Las curvaturas normal y geodésica de una curva sobre una superficie pueden calcularse fácilmente a partir de los vectores tangente a la curva y las normales a la curva y la superficie:



Curvaturas principales
Si se considera un punto P0 de la superficie y toda una colección de curvas contenidas en la superficie que pasan por P0 se observa que la curvatura normal kn de cualquiera de estas curvas en P0 varía entre dos valores extremos k1 < kn < k2. Estos dos valores de hecho son las soluciones ki de la siguiente ecuación:

Un punto se llama umbilical si en él k1 = k2. Para un punto no-umbilical P0 las direcciones tangentes a la superficie para las cuales se alcanza el máximo y el mínimo de la curvatura normal son siempre ortogonales. En cada punto estas dos direcciones ortogonales se llaman direcciones principales de curvatura. Una condición necesaria y suficiente para que la dirección dada por un vector sea principal es que si:


Entonces que esa dirección sea dirección principal de curvatura implica que:

Líneas de curvatura
Una línea de curvatura es una curva regular conexa contenida en una superficie regular en la cual todos sus vectores tangentes generan una dirección principal en la superficie.
Curvatura gaussiana
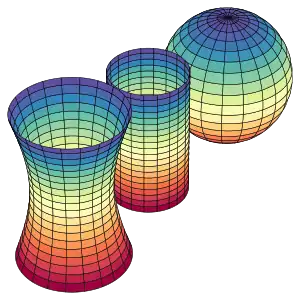
La curvatura gaussiana de una superficie es un número real (P0) que mide la curvatura intrínseca en cada punto regular P0 de una superficie. Esta curvatura puede calcularse a partir de los determinantes de la primera y segunda formas fundamentales de la superficie:


Esta curvatura gaussiana en general varía de un punto a otro de la superficie y está relacionada con las curvaturas principales de cada punto (k1 y k2), mediante la relación K = k1k2.
Un caso interesante de superficie es la esfera, que tiene la misma curvatura en todos sus puntos. Calculando la curvatura de Gauss de una esfera (2-esfera). A partir de la fórmula anterior se llega fácilmente a que para una esfera de radio r, la curvatura gaussiana es igual en todos los puntos e igual a .

Si bien observamos que hay superficies que tienen curvatura constante, la curvatura gaussiana debe verse como una relación
donde (una función diferenciable sobre S) que asigna a cada superficie su función de curvatura gaussiana.
La forma real de definir la curvatura gaussiana es mediante el operador de forma (del inglés shape operator) de la superficie S:


- , definido mediante
- , definido mediante


Donde son los vectores tangentes coordenados y están siendo evaluados en la posición p.

Con la derivada (jacobiano) del operador de forma

uno obtiene una transformación lineal auto-adjunta -llamada transformación de Weingarten- y así, la curvatura gaussiana es determinante de L, i.e.
![{\displaystyle K(p)=\det[L(p)]\,}](../I/0fe3d3b5d49d7ae4d67dd7c21a7ec6f150a911ae.svg)
Es relativamente fácil verificar que coincide con la definición dada arriba.
En términos de los componentes del tensor de curvatura de Riemann para las 2-variedad diferenciables, uno encuentra la relación

Ejemplo, la curvatura gaussiana de un toro es donde se ha usado la parametrización:


Véase también
Referencias
Bibliografía
- Girbau, J.: "Geometria diferencial i relativitat", Ed. Universitat Autònoma de Catalunya, 1993. ISBN 84-7929-776-X.
- Spiegel, M. & Abellanas, L.: "Fórmulas y tablas de matemática aplicada", Ed. McGraw-Hill, 1988. ISBN 84-7615-197-7.
- M. do Carmo: "Differential geometry of curves and surfaces".
- John M. Lee (1997), Riemannian Manifolds: An Introduction to Curvature, Graduate Texts in Mathematics 176, Springer-Verlag, ISBN 0-387-98271-X.
Enlaces externos
 Portal:Matemática. Contenido relacionado con Matemática.
Portal:Matemática. Contenido relacionado con Matemática.- Enciclopedia en-línea de Springer-Verlag
| Control de autoridades |
|
|---|
 Datos: Q2502381
Datos: Q2502381 Multimedia: Differential geometry of surfaces / Q2502381
Multimedia: Differential geometry of surfaces / Q2502381