Red (grupo)
En matemáticas, especialmente en geometría y teoría de grupos, una red o retículo en Rn es un subgrupo discreto de Rn que genera el espacio vectorial Rn de los números reales. Cada red en Rn se puede generar a partir de una base del espacio vectorial mediante la formación de todas las combinaciones lineales de coeficientes enteros. Una red o retículo puede ser vista como una teselación regular de un espacio por una celda o malla primitiva.
Las redes tienen muchas aplicaciones importantes en la matemática pura, en especial en relación con el álgebra de Lie, teoría de números y la teoría de grupos. También se presentan en matemáticas aplicadas en relación con la teoría de la codificación, en criptografía debido a la dificultad del cálculo en varios problemas de red, y se utiliza en diversos campos de las ciencias físicas. Por ejemplo, en ciencia de los materiales y física del estado sólido, una red es un sinónimo del esqueleto de una estructura cristalina, una matriz de puntos regularmente espaciados en tres dimensiones coincidiendo con las posiciones de los átomos o moléculas en un cristal. Más en general, los modelos de redes se estudian en física, muy frecuentemente mediante las técnicas de la física computacional.
Consideraciones de simetría y ejemplos
Una red es el grupo de simetría de la simetría traslacional discreta en n direcciones. Un patrón o modelo de esta red de simetría traslacional no puede tener más, pero sí puede tener menos simetría que la propia red en sí misma.
Una red en el sentido de un conjunto tridimensional de puntos regularmente espaciados que coinciden, por ejemplo con las posiciones de los átomos o moléculas en un cristal, o de forma más general, la órbita de una acción de grupo en virtud de la simetría traslacional, es un traslado de la red de traslación: una clase lateral, que no tiene que contener el origen, y por ello no necesita ser una red en el sentido anterior.
Un ejemplo simple de una red en Rn es el subgrupo Zn. Un ejemplo más complicado es la red de Leech, que es una red en R24. El periodo de red en R2 es fundamental para el estudio de las funciones elípticas desarrollado en las matemáticas del siglo XIX, generalizada a las dimensiones superiores en la teoría de las funciones abelianas.
División del espacio según una red
Una red típica Λ en Rn tiene la forma

donde {v1, ..., vn} es una base de Rn. Diferentes bases pueden generar la misma red, pero el valor absoluto del determinante de los vectores vi únicamente está determinado por Λ, y se denota por d(Λ). Si pensamos en una red como una forma de división del conjunto Rn completo en poliedros iguales (copias de un paralelepípedo n-dimensional conocido como región fundamental de la red), entonces d(Λ) es igual al volumen n-dimensional de este poliedro. Esta es la razón por la que a veces d(Λ) es llamado el covolumen de la red.
Puntos de la red en conjuntos convexos
El teorema de Minkowski relaciona el número d(Λ) y el volumen de un conjunto convexo simétrico S con el número de puntos de red contenidos en S. El número de puntos de la red contenidos en un politopo todos cuyos vértices son elementos de la red es descrito por el polinomio de Ehrhart del politopo. En las fórmulas de algunos de los coeficientes de este polinomio también figura d(Λ).
- Véase también :Puntos enteros en poliedros
Redes en dos dimensiones: una discusión detallada
Hay cinco tipos de redes en 2D como demuestra el teorema de restricción cristalográfica. A continuación, el grupo cristalográfico plano (en inglés, wallpaper group[1]) de la red se da entre paréntesis; nótese que un modelo con esta red de simetría traslacional no puede tener más, pero sí puede tener menos simetría que la propia red. Si el grupo de simetría de un modelo contiene una rotación de orden n, entonces la red tiene simetría de orden n para n par, y de orden 2n para n impar.
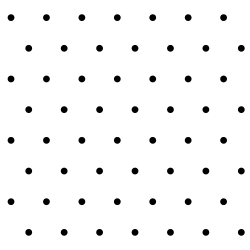
- Red rómbica también llamada red rectangular centrada o red triangular isósceles(cmm), con hileras igualmente espaciadas de puntos espaciados uniformemente, con las filas alternativamente desplazadas una distancia media (filas simétricamente escalonadas):
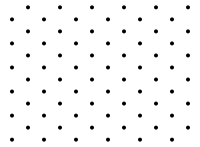
- Red hexagonal o red triangular equilátera(p6m)
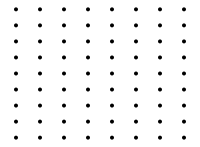
- Red cuadrada (p4m):
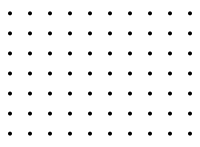
- Red rectangular también llamada red rectangular primitiva (pmm):
- En términos más generales, una red paralelogramo también llamada red oblicua (p2) (con filas escalonadas de forma asimétrica):
Para la clasificación de una red dada, se comienza con un punto y se toma un segundo punto entre los más próximos. Para el tercer punto, que no ha de estar en la misma línea, se tendrán en cuenta las distancias a los dos puntos. Entre los puntos para los que la más pequeña de estas dos distancias es mínima, se elige un punto para el que la más grande de esas distancias sea mínima. (No son lógicamente equivalentes.
Las cinco casos corresponden a triángulos que pueden ser equiláteros, isósceles recto, recto, isósceles y escaleno. En una red romboidal, la distancia más corta puede ser una diagonal o un lado del rombo, es decir, el segmento que conecta los dos primeros puntos pueden o no ser uno de los lados iguales del triángulo isósceles. Esto depende de que el ángulo menor del rombo sea menor de 60°, o esté entre 60° y 90°.
El caso general se conoce como red periódica. Si los vectores p y q generan la red, en vez de p y q también podemos poner p y p-q, etc. En general en 2D, podemos tomar a p + b q y c p + d q para a,b, c y d enteros tales que ad-bc es 1 o -1. Esto asegura que p y q son combinaciones lineales enteras de los otros dos vectores. Cada par p, q define un paralelogramo, todos con la misma área, igual a la magnitud del producto cruzado. Un paralelogramo define por completo el objeto. Sin simetría adicional, este paralelogramo es un paralelogramo fundamental.

Los vectores p y q pueden ser representados por números complejos. En cuanto afecta al tamaño y la orientación, un par puede ser representado por su cociente. Expresado geométricamente: si dos puntos de la red son 0 y 1, consideremos la posición de un tercer punto de la red. La equivalencia en el sentido de generar la misma red está representada por el grupo modular: representa la elección de un tercer punto diferente en la misma red S, representa la elección de un lado diferente del triángulo como lado de referencia 0-1, lo que en general implica cambiar la escala de la red, y la rotación de la misma. Cada "triángulo curvado" de la imagen contiene para cada forma 2D de la red un número complejo, la zona gris es una representación canónica, que corresponde a la clasificación anterior, con los puntos 0 y 1 de la red que están más cerca entre sí; se evita la duplicación incluyendo sólo la mitad de la frontera. Las redes rómbicas están representadas por los puntos de su perímetro, con la red hexagonal de vértice, y la i para la red cuadrada. Las redes rectangulares se encuentran en el eje imaginario, y el área restante representa las redes en forma de paralelogramo, con la imagen especular de un paralelogramo representado por la imagen especular en el eje imaginario.


Redes en tres dimensiones
Los 14 tipos de redes en 3D se llaman redes de Bravais. Se caracterizan por su grupo espacial. Los modelos 3D con simetría de traslación de un tipo particular no pueden tener más, pero pueden tener menos simetría que la propia red.
Redes en el espacio complejo
Una red de Cn es un subgrupo discreto de Cn, que expande el espacio vectorial real 2n-dimensional Cn. Por ejemplo, los enteros de Gauss forman una red de C.
Cada red de Rn es un grupo abeliano libre de rango n; cada red de Cn es un grupo abeliano libre de rango 2n.
En grupos de Lie
En términos más generales, una red Γ en un grupo de Lie G es un subgrupo discreto, de modo que el cociente G/Γ es de medida finita, pues su medida se heredó de la medida de Haar en G(invariante por la izquierda o invariante por la derecha; la definición es independiente de la elección). Ese será sin duda el caso cuando G/Γ es compacto, pero esa condición necesaria no es suficiente, como lo demuestra el caso del grupo modular de SL2(R), que es una red, pero en la que el cociente no es compacto (tiene cúspides) . Hay resultados generales que indican la existencia de redes en los grupos de Lie.
Se dice que una red es uniforme o cocompacta si G/Γ es compacto, de lo contrario la red se llama no uniforme.
Redes en espacios vectoriales generales
Mientras que normalmente consideramos redes en este concepto se puede generalizar a cualquier espacio vectorial de dimensión finita en cualquier campo. Esto se puede hacer de la siguiente manera:


Sea un campo, sea un espacio vectorial -dimensional , sea una -base de y sea un anillo contenido en . Entonces la red en generada por viene dada por:








Las diferentes bases , en general, generarán diferentes redes. Sin embargo, si la matriz de transición de del l T </ math> entre las bases es del l GL_n (R) </ math> - la grupo general lineal de R (en términos simples, esto significa que todas las entradas de están en y todas las entradas de están en - lo que equivale a decir que el determinante de está en - el grupo unidad de los elementos en con inversos multiplicativos) luego las redes generadas por estas bases será isomorfas ya que induce un isomorfismo entre las dos redes.



Casos importantes de tales redes se presentan en la teoría de números siendo K un campo p-ádico y siendo R los enteros p-ádicos.
Para un espacio vectorial que sea también un espacio producto interno, la red dual puede ser descrita concretamente por el conjunto:

o de forma equivalente,

Véase también
- Red (matemáticas)
- Red recíproca
- Red unimodular
- Sistema cristalino
- Teorema de compactitud de Mahler
- Grafo de red
- Criptografía basada en red
Referencias
- GRUPOS DE SIMETRÍA EN EL ESGRAFIADO SEGOVIANO. Gilsanz Mayor M.A., Martínez Serrano, M.F. I Jornada Nacional de Investigación en Edificación. Madrid, 2007.
- Conway, John Horton; Sloane, Neil J. A. (1999), Sphere Packings, Lattices and Groups, Grundlehren der Mathematischen Wissenschaften 290 (3rd edición), Berlin, New York: Springer-Verlag, ISBN 978-0-387-98585-5, MR 0920369.
| Control de autoridades |
|
|---|
 Datos: Q1096885
Datos: Q1096885 Multimedia: Lattice (group) / Q1096885
Multimedia: Lattice (group) / Q1096885