Guidage de missile
Le guidage est l’ensemble des opérations qui permettent au missile de remplir sa mission, du point de vue approche vers l’objectif ou but choisi, malgré l’intervention de perturbations (turbulences de l’air, bruit des détecteurs, mouvement de la cible…). C’est le guidage qui permet de faire la distinction entre un missile et une roquette ou un projectile d’artillerie[1]. Le guidage (mouvement du centre de gravité) est différent du pilotage (mouvement autour du centre de gravité).


Les systèmes de guidage sont de natures très variés, selon la technologie disponible et l’objectif du missile. Ils comprennent deux fonctions principales : la détection de la cible, et l’élaboration des ordres transmis au pilotage. Ces systèmes se retrouvent aussi sur des bombes guidées[N 1].
Généralités
Historique
Avant la Seconde Guerre mondiale, la trajectoire des « missiles »[N 2] dépendaient uniquement des conditions initiales (vitesse, direction au lancement…) et des effets balistiques, et leur efficacité était assez faible. Les progrès techniques ont permis le développement de systèmes de guidage permettant des tirs plus précis. L’évolution se poursuit aujourd’hui pour avoir des armes plus précises et plus adaptées aux menaces (qui évoluent en même temps)[2].
Contrôle d'un missile
Les asservissements de trajectoire d’un missile comportent plusieurs fonctions[3],[4],[5] :
- Le guidage consiste à maîtriser l’évolution de la trajectoire de l’engin. Il vise à suivre une trajectoire de référence définie par les contraintes géométriques et cinématiques du problème et fournit à cet effet des consignes d’accélérations et d’angles d’attitude. Dans le cas d’une cible mobile, le système doit emmener l’engin au plus près de sa cible[N 3].
- le pilotage consiste à réaliser les consignes exprimées par le guidage, et à stabiliser l’engin. Le pilotage se fait principalement par actionnement des gouvernes.
- la navigation assure le bouclage de l’asservissement en fournissant une estimation de la position, vitesse et attitude de l’engin tout au long du vol.
Un système de guidage est constitué de deux éléments :
- Le détecteur permet de déterminer l’écart angulaire et/ou la distance par rapport à la cible. Ce détecteur peut être l’œil humain, un détecteur infrarouge, un radar…
- À partir de ces informations, l’élaborateur d’ordre calcule les commandes à transmettre à la chaîne de pilotage.
Ces éléments peuvent être dans le missile ou déportés[6].
Procédés de guidage
Les deux grands procédés de guidage sont le téléguidage et l’autoguidage, ils se distinguent sur le fait que le système soit embarqué ou non dans le missile.
Dans la conception du missile, le choix du procédé dépend de la technologie disponible, du prix et du besoin opérationnel.
- le téléguidage peut être utilisé dans le cas d’une cible fixe ou lente, visible par le tireur (missiles antichar) ;
- l’autoguidage direct peut être utilisé pour les cibles mobiles et présentant un contraste (missiles antinavire, antichar, antibalistique, anti-radar, surface-air, air-air. Les rayonnements infrarouges ou électromagnétiques permettent de détecter une cible ayant un contraste par rapport au fond (source de chaleur ou surface équivalente radar)[N 4] mais ne pourront pas détruire une piste d’aéroport par exemple.) ;
- l’autoguidage indirect peut être utilisé pour les cibles fixes définies a priori (missiles de croisière, air-sol et les bombes guidées)[7].
Les missiles balistiques ont une propulsion et un guidage durant une portion très courte de leur trajectoire, et ont le reste du temps une trajectoire balistique, comme leur nom l’indique[8].
Depuis les années 1980, la plupart des missiles (hors courte portée) ont deux modes de guidage : inertiel pour la mi-course, autoguidage pour la course terminale[9]. Certains autodirecteurs des années 2000 sont bi-mode (par exemple le Dual Mode Brimstone a un autodirecteur radar et laser semi-actif).
On distingue les modes Lock on before launch (LOBL, Accrochage avant le tir) et Lock on after launch (LOAL, Accrochage après le tir).
Téléguidage
Dans le téléguidage, il est possible de distinguer le téléguidage direct (la mesure et l’élaboration d’ordres sont faits à distance) et le téléguidage indirect (seule l’élaboration d’ordre se fait à distance)[10].
Téléguidage direct

Dans le téléguidage manuel, un pilote humain dirige le missile (comme s’il pilotait un avion). C’est une technologie assez ancienne (années 1940-1960) utilisée dans les missiles antichars SS10, SS11, ENTAC et les missiles air-surface LBD Gargoyle, AS12, AS20, AS30. Dans le téléguidage semi-automatique, c’est toujours un opérateur humain qui suit la cible, mais l’élaboration d’ordre du missile est fait par un calculateur. Les missiles fonctionnant ainsi ont été développés dans les années 1970, comme les antichars Milan, le HOT ou le TOW ou les sol-air courte portée « temps clair » Roland et Rapier. Ces systèmes ont l’inconvénient de rendre le tireur vulnérable pendant qu’il suit la cible[11]. Les lanceurs de missiles antichars utilisent le plus souvent un goniomètre infrarouge pour situer le missile grâce au traceur situé à son arrière. Le goniomètre mesure l’écart angulaire entre le missile et la cible, transformé en écart métrique puis en instructions pour corriger le tir[12].
Le téléguidage automatique ne nécessite plus l’intervention humaine après le tir (« tire et oublie ») par exemple le Crotale[11].
Téléguidage indirect
Des missiles air-surface ou surface-surface sont dotés d’une caméra qui permet à l’opérateur humain de les diriger (AS-37 Martel version TV)[13].
Autoguidage
L’autoguidage permet au missile de se déplacer de façon totalement automatique, sans nécessiter d’opérateur (« tire et oublie »). Le composant du missile servant à détecter la cible est l’autodirecteur (« tête chercheuse » dans le langage commun). Dans l’autoguidage indirect, la référence n’est pas liée à la cible.
Autoguidage direct
Le missile est capable de détecter la cible, et d’élaborer ses ordres. C’est un fonctionnement privilégié dans le cas d’une cible mobile. Il existe plusieurs moyens de détection de cible.
Radar actif

L’autodirecteur comporte un émetteur et récepteur radar. Les ondes émises sont réfléchies par les cibles et reviennent vers le missile. Un traitement du signal permet de trier les réflexions dues à un avion à celles dues à l’eau ou à la terre. La portée de ces autodirecteurs est supérieure à celle des modèles infrarouges. Toutefois, à cause de la taille réduite de l’antenne contenue dans le missile, les cibles ne sont pas détectables à longues distances[14]. Les missiles AIM-120 AMRAAM, Vympel R-77, MICA et Exocet par exemple utilisent ce mode de guidage.
La cible, qui peut avoir détecté le balayage, ne sait pas si un missile a été tiré ou non contre elle[15].
Exemple avec le Mirage 2000-5 équipé du radar RDY
.jpg.webp)
Le radar balaie le ciel à la recherche de cibles et « habille » les échos qu’il reçoit, en se basant notamment sur le résultat des interrogations IFF (système de codage qui permet de savoir si l’appareil est ami ou ennemi).
À bord du Mirage 2000-5, le pilote règle son radar RDY (Radar Doppler Y, développement à partir de 1984, premier vol en , premier radar de série livré en ), dont l’image apparaît sur l’écran de visualisation tête moyenne (VTM), sans quitter les mains du manche et de la manette des gaz. Avec le pouce de la main gauche, il déplace l’alidade (curseur) sur l’écran et désigne lui-même les cibles qu’il désire poursuivre.
Cette phase est appelée Track while scan (TWS, ou accrochage pendant le balayage). Une fois les cibles sélectionnées (4 au maximum pour les Mirage 2000-5), le pilote passe en mode TWS automatique : le radar va alors optimiser son balayage pour garder en permanence les cibles en ligne de mire, tout en les hiérarchisant en fonction de leur dangerosité (ici, est utilisé le critère de vitesse relative).
La cible prioritaire sera la FKT pour First to Kill Target (objectif à détruire en premier) ; suivie de la SKT (Second to Kill Target) et des P3 pour les cibles suivantes. Sur l’écran de visualisation du pilote, des symboles intuitifs permettent de suivre la situation qui évolue toujours très vite : une cible vue par le radar est représentée par un carré blanc. Ce carré se noircit lorsque la cible est désignée. Il devient une croix fine pour la SKT et une croix épaisse pour la FKT.
Les cibles étant sélectionnées et renseignées, les missiles MICA-EM peuvent entrer en scène.
Au moment où il quitte l’avion, le missile dispose d’une désignation d’objectif (DO) fournie par le radar, qui lui indique où est la cible à cet instant précis et quel est son vecteur vitesse. Mais même à 3 000 km/h, parcourir une cinquantaine de kilomètres demande 60 secondes. Pendant ce temps, la cible peut changer de direction ou entamer des manœuvres évasives, ce qui rend caduques les informations passées au lancement.
Les informations données au missile pendant le vol sont donc constamment actualisées au travers d’une LAM (liaison air-missile) plusieurs fois par seconde par le radar toujours en mode balayage. Sur le Mirage 2000, l’émetteur de la LAM est placé en haut de la dérive pour lui offrir le meilleur point d’émission en direction du missile qui évolue quelque part vers l’avant.
Le Mirage 2000-5 est capable de suivre simultanément 8 cibles et d’en engager 4. Toutefois, les avions de l’armée de l’air française ne disposent que de 2 LAM simultanées jusqu'à ce qu’ils soient portés au standard SF1C-IR à partir de 2006. Deux possibilités s’offrent alors au pilote qui souhaite engager 4 cibles simultanément : tirer deux missiles avec LAM et deux sans LAM en espérant que les cibles de ces derniers ne changent pas trop de trajectoire ; ou bien attendre que les 2 premiers missiles activent leur autodirecteur et libèrent ainsi les LAM pour guider la salve suivante.
Arrivé à quelques kilomètres de la cible, le missile « fox 3 » met en route son propre émetteur radar et finalise lui-même la trajectoire vers la cible. Celle-ci est alors avertie par son RWR qu’il est accrochée par un missile, mais il déjà trop tard et il reste très peu de temps pour tenter des manœuvres évasives (Rappelons que dans le cas d’un tir « fox 1 », la cible sait qu’elle est accrochée dès le lancement du missile. Le pilote dispose alors de quelques dizaines de secondes pour élaborer une parade).
Les différents modes de gestion de la LAM permettent de faire varier les scénarios de tir en « Fox 3 » :
- Dans le mode 1, l’avion tire en mode LAM et le conserve le plus longtemps possible pour donner les meilleurs informations possibles à son missile. Il peut toutefois choisir de faire demi-tour pour ne pas trop s’exposer à un tir de riposte. Dès le demi-tour, le radar cesse de poursuivre la cible et la LAM cesse également. Si la cible suit une trajectoire régulière, le missile saura la trouver seul quand il allumera son propre autodirecteur. Mais pour peu que la cible casse sa trajectoire, il y a de fortes chances que l’autodirecteur (qui reste relativement peu puissant avec un angle de visée assez étroit) ne trouve que le vide quand il se mettra en route.
- Dans le mode 2, l’avion tireur dégage immédiatement après le tir, ce qui exclut l’emploi de la LAM. Ce qui fait chuter fortement la PK (Probability of Kill).
- Le mode 3 correspond au tir avec viseur de casque, qui pour le Mica-IR. Mode redoutable pour les affrontements à courte portée, le pilote dirige le missile en suivant la cible du regard. N’est pas disponible actuellement pour les Mirage mais le Rafale devrait en être pourvu.
- Le mode 4, qui se rapporte également au missile à autodirecteur infrarouge. Ce mode s’applique lorsque le missile encore sur son rail détecte lui-même sa cible et l’accroche avant d’être tiré.
À noter que les puissances de calcul aujourd’hui disponibles ouvrent de nouveaux horizons aux radars embarqués. Encore faut-il bien relativiser les choses, le radar RDY a par exemple été développé au début des années 1990 et il utilise des microprocesseurs de cette époque, c’est-à-dire de la classe des premiers Pentium. On touche là du doigt les questions d’obsolescence qui entrent en compte dès lors que le développement des systèmes se compte non plus en mois ou en années, mais en décennies mais les technologies sur étagère permettent des mises à niveau relativement rapide.
Radar semi-actif
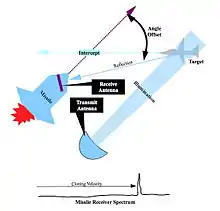
Les radars semi actifs, de conception plus simple, sont apparus dans les années 1950 (par exemple l’AIM-7 Sparrow). Il n’était pas possible à l’époque d’installer à la fois un émetteur et un récepteur radar dans un missile. L’avion qui a tiré le missile émet les ondes électromagnétiques qui sont réfléchies par la cible puis reçues et analysées par le missile[14].
Radar passif
Des missiles anti-radar comme l’Armat, une version de l’AS-37 Martel AR, se guident en repérant les signaux radar de l’ennemi et en se dirigeant vers l’émetteur[16].
Infrarouge passif

Un autodirecteur à infrarouge passif comporte des détecteurs refroidis à 70 K, sensibles aux longueurs d’onde 3 à 5 µm pour les missiles antiaériens, 8 à 12 µm pour les antichars. Les premiers détecteurs (années 1960 à 1980) ne comportaient qu’un seul élément derrière un disque modulateur tournant. De nos jours, on utilise des capteurs IR-CCD qui permettent d’obtenir une image 2D[17]. Ce détecteur est portée par une « antenne » mobile ; la ligne de visée est alors différente de la trajectoire du missile[18]. Sauf dans le cas d’une poursuite pure (§ 3), l’asservissement de l’angle de l’antenne est découplé de celui du missile, ce qui nécessite une stabilisation de l’antenne avec un gyroscope, ou par l’intermédiaire de calculs de changement de repère à partir de mesures inertielles[19].
L’autodirecteur a pour fonction de mesurer de l’écart angulaire (« écartométrie ») entre la trajectoire du missile et sa ligne de visée. Celle-ci se fait avec la détection de rayonnement infrarouge entre la cible et le fond. Certains autodirecteurs peuvent également rechercher leur cible dans un champ angulaire étendu (le « balayage »). Les autodirecteurs les plus récents sont également capables de classer les cibles détectées et de reconnaître les vraies cibles des leurres[20].
Les autodirecteurs infrarouges modernes ont des portées de 10 à 15 km[21]. Les missiles AIM-9 Sidewinder, Vympel R-73, Mistral, Magic 2 ou MICA utilisent de tels systèmes.
Laser semi-actif

Un désignateur laser est une source laser servant à illuminer une cible afin de guider une arme (bombe ou missile). Le laser n’opère pas nécessairement dans le spectre visible.
Cette technique a été développée dans les années 1970, grâce aux progrès réalisés dans la technologie Laser. Par exemple l’AS-30L, mis en service en 1986 sur le Jaguar A se dirige vers une cible illuminée par un « pod » (nacelle) ATLIS embarqué sur l’avion[22].
Imageurs
Un imageur visible peut permettre à un missile air-sol de reconnaître sa cible. L’image a préalablement été enregistrée dans le système (AGM-65 Maverick)[23]. Un imageur infrarouge peut également être utilisé, cette technique permet une grande précision (AASM version métrique ou le SPICE (en))[24].
Autoguidage indirect
L’autoguidage indirect consiste à élaborer les ordres à bord du missile, mais ce n’est pas la cible qui est directement détectée. La position est déterminée par rapport à un système de référence auxiliaire, et les coordonnées de la cible sont connues par rapport à cette référence[25].
Navigation inertielle

Le missile allemand V2 fut le premier missile balistique (qu’on appelait encore « fusée ») de l’histoire. Mis en service en 1944, sa trajectoire était très imprécise, et le missile ne pouvait que bombarder les villes[26].
La centrale inertielle du missile contient trois accéléromètres permettant de mesurer l’accélération linéaire dans les trois axes du repère engin, et trois gyromètres permettant de mesurer la vitesse de rotation dans les trois axes du repère engin. Grâce à des calculs tenant compte des effets de pesanteur et des accélérations d’entrainement et de Coriolis (liées à la rotation de la Terre) et utilisant des changements de repères, ces informations permettent de fournir la vitesse de l’engin ainsi que ses coordonnées dans le repère terrestre (latitude, longitude, altitude, lacet, tangage et roulis).
À cause des intégrations contenues dans les calculs, la précision se dégrade au cours du temps. Ce système est toutefois extrêmement fiable, ne dépend pas de sources extérieures et est insensible à toute perturbation de l’environnement[27].
Beaucoup de missiles utilisent cette méthode, pour leur guidage à mi-course, suivie éventuellement d’un autoguidage direct[25].
Guidage inertiel avec recalage par visée stellaire
Utilisé par les missiles balistique.
Positionnement par satellites
Grâce à une constellation de satellites émettant un signal radio, le missile peut connaître sa position à un instant donné avec une grande précision. Le système le plus connu est le Global Positioning System américain, sa mise en place commence en 1978 et il offre une couverture mondiale depuis 1995. Par rapport à la navigation inertielle, cette technique présente les inconvénients d’un temps de traitement plus important, et d’une sensibilité aux perturbations électromagnétiques[28].
Ainsi les systèmes actuels sont le plus souvent hybrides, c’est-à-dire qu’ils utilisent la navigation inertielle comme source primaire mais avec une source complémentaire comme le GPS pour en corriger la dérive[29].
Autres
Le lanceur de missile émet un faisceau laser codé spatialement. Le missile, doté d’un récepteur, peut se repérer en décodant le message contenu dans le laser[30],[31].
La technologie TERCOM (Terrain Contour Matching, repérage des contours du terrain) permet au missile de se repérer grâce à son contexte géographique. Une antenne radar détermine les éléments de paysage autour du missile. Un calculateur compare ensuite la scène avec un modèle numérique de terrain stocké en mémoire, ce qui permet au missile de corriger sa direction[2]. Cette méthode est utilisée dans les missiles des croisière : AGM-86 ALCM, BGM-109 Tomahawk, AGM-129 ACM.
Lois de guidage
Dans cette section, différentes lois de guidage sont présentées avec les simplifications suivantes :
- le missile et la cible sont considérés ponctuels,
- il n’y a pas de constante de temps liée au traitement du signal et au délai des actionneurs,
- les bruits et perturbations sont négligés,
- le guidage se fait dans le plan[32].
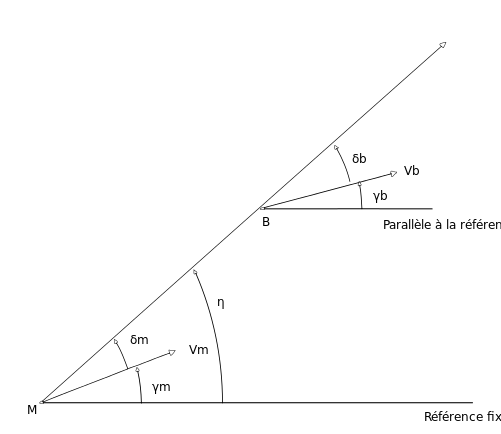
Notations utilisées :
- M est le missile et B le but
- et sont les vecteurs vitesse
- est l’accélération latérale du missile, l’accélération normale
- et
- et sont les angles entre les vecteurs vitesse et une référence fixe arbitraire (et non horizontale) ; est l'angle entre MB et cette référence.









Si , on parle d’« attaque arrière », si , on parle d’« attaque frontale», et si , on parle d’« attaque latérale»[33].



Poursuite
La poursuite ou « courbe du chien » est utilisable en autoguidage ou téléguidage indirect. Dans ce cas, la vitesse du missile fait un angle constant avec la direction du but, on a [N 5]. En poursuite pure, [34].


Navigation proportionnelle
La navigation proportionnelle est utilisable en autoguidage ou téléguidage indirect. Dans ce cas, le missile a une vitesse de rotation proportionnelle à celle de la droite missile but, soit . A est la constante de navigation proportionnelle. Avec , on obtient , ce qui permet de relier la sortie du détecteur à l’entrée du système de pilotage[35].



Collision
La collision est utilisable en autoguidage ou téléguidage indirect. Dans ce cas, la droite MB reste dans la même direction, soit [36].

Alignement
L’alignement est utilisable en téléguidage direct. Cela consiste à forcer l’alignement entre le missile, le but et l’opérateur[37].
Cette technique était utilisée sur les premiers missiles surface-air mais fut jugée inefficace pour des longues portées et elle est aujourd’hui abandonnée. Cette méthode fut utilisée par exemple sur les RIM-2 Terrier américains dans les années 1950[38].
Notes et références
Notes
- Il existe également des munitions d’artillerie guidées (en) : M982 Excalibur, MGM-51 Shillelagh…
- On distinguait alors les missiles (dans le sens « fusées ») et les missiles guidés. Aujourd’hui, par définition un missile est guidé.
- Dans le cas de missiles antiaériens, souvent équipés de détecteurs de proximité pour commander l’explosion, un impact direct n’est pas nécessaire pour détruire la cible.
- De la même façon, les torpilles utilisent les ondes acoustiques (Sonar).
- est la fonction dérivée de x par rapport au temps

Références
- Carpentier 1989, ch 1 I.1. Définition du guidage
- Fundamentals of Naval Weapons Systems, Chapter 15 Guidance and Control ; 16.5.3 Terrestrial Guidance Methods
- Flament 2009, 1.3 Structure de commande d’un véhicule autonome
- Harcaut et al. 1998, 4.1 Besoins du guidage
- Marzat 2011, 2.3 Guidage-pilotage
- Carpentier 1989, ch 1 I.2. Éléments constitutifs de l’ensemble du système de guidage
- Carpentier 1989, ch 1 I.4.3. Récapitulations des procédés de guidage
- Carpentier 1989, ch 1 I.3.1. Mobiles et détecteurs considérés dans ce cours
- Carpentier 1989, ch 1 I.3.1. 3. Mobiles ayant deux modes successifs de guidage
- Carpentier 1989, ch 1 I.4.1 Téléguidage
- Carpentier 1989, ch 1 I.4.1.1 Téléguidage direct
- Delteil 1997, Téléguidage direct
- Carpentier 1989, ch 1 I.4.1.2 Téléguidage indirect
- (en) Carlo Kopp, « Active and semiactive radar missile guidance », sur www.ausairpower.net,
- « FOX-3, les missiles à longue portée », sur www.avionslegendaires.net (consulté le )
- Belan et Mercillon 2006, p. 126
- Delteil 1997, 2.4 Génération des écartométries
- Delteil 1997, 2.2.1 Aérien mobile
- Delteil 1997, 2.5 Asservissement de la tête gyro-stabilisée
- Delteil 1997, 2.1 Fonctions à assurer
- Belan et Mercillon 2006, p. 124
- Belan et Mercillon 2006, p. 105
- Carpentier 1989, ch 1 I.4.2.1 Autoguidage direct
- (en) « France’s AASM Precision-Guided Bombs », sur www.defenseindustrydaily.com,
- Carpentier 1989, ch 1 I.4.2.2 Autoguidage indirect
- Belan et Mercillon 2006, p. 11
- Flament 2009, 1.5.1 Navigation inertielle
- Flament 2009, 1.5.2 Positionnement par satellites
- Flament 2009, 1.6.2 La navigation hybridée
- Dansac 1994, 1.2.2 Guidage sur faisceau directeur
- Meyzonnette, Fouilloy et Tribut 1997, Guidage de missiles sur faisceau directeur
- Carpentier 1989, ch 2 I.1 Introduction
- Carpentier 1989, ch 2 I.3 Notations
- Carpentier 1989, ch 2 I.1.4.1.1 La poursuite
- Carpentier 1989, ch 2 I.1.4.1.2 Navigation proportionnelle classique
- Carpentier 1989, ch 2 I.1.4.1.3 Collision
- Carpentier 1989, ch 2 I.1.4.2 Loi de guidage en téléguidage : alignement
- (en) Jeff Scott, « Missile Guidance », sur www.aerospaceweb.org,
Bibliographie
- René Carpentier, Guidage des avions et des missiles aérodynamiques, t. I méthodes de conduite mécanique du vol et pilotage appliqué au missile, École nationale supérieure de l'aéronautique et de l'espace, , 4e éd.
- Alain Delteil, Guidage des missiles par infrarouge passif, Éditions techniques de l'ingénieur, (lire en ligne)
- Jean-Louis Meyzonnette, Jean-Pierre Fouilloy et Hélène Tribut, Communication et guidage par transmission laser, Éditions techniques de l'ingénieur, (lire en ligne)
- Jean Dansac, Optronique : introduction, Éditions techniques de l'ingénieur, (lire en ligne)
- Guillaume Belan et Patrick Mercillon, 1945-2005: La saga des missiles européens, Paris, TTU, , 176 p. (lire en ligne)
- Mathieu Flament, Apport du filtrage particulaire au recalage altimétrique dans un contexte de navigation hybridée, , 116 p. (lire en ligne)
- Julien Marzat, Diagnostic des systèmes aéronautiques et réglage automatique pour la comparaison de méthodes, , 187 p. (lire en ligne)
- Jean-Philippe Harcaut, Eric Larcher, Jean-Paul Bonnet et Stéphane Dupont, « Considérations sur l'aérodynamique pour le pilotage et le guidage des engins tactiques », RTO AVT Symposium, , p. 10 (lire en ligne)
 Portail des armes
Portail des armes  Portail de l’aéronautique
Portail de l’aéronautique