Statique du solide
La statique du solide est la branche de la statique étudiant l'équilibre des pièces dans un mécanisme. C'est un maillon essentiel dans le dimensionnement des systèmes mécaniques réels.
Pour les articles homonymes, voir Statique.
Statique du point et statique du solide
Les simplifications de la mécanique du point reposent sur le fait que le point est invariant par rotation, et que toutes les forces sont appliquées au point matériel. Alors les forces suffisent à modifier sa position. Pour les solides, constitués d'une infinité de points matériels, les déplacements possibles, appelés aussi degrés de liberté, sont de deux natures : translations (3 directions principales) et rotations (autour de ces trois directions). Alors que les translations ne peuvent être provoquées que par des forces, les rotations sont générées par des moments de ces forces, ou autres couples de force.
Quand l'équilibre d'un point ne nécessite l'établissement que de 3 relations algébriques (équation vectorielle des forces à 3 dimensions), celui du solide demande alors la considération de 3 équations supplémentaires (équation vectorielle des moments). Le principe fondamental de la statique se compose alors du théorème de la résultante (somme des forces nulle) et du théorème du moment (somme des moments nulle).
L'étude de l'équilibre d'un solide nécessite toujours la considération de ces 2 théorèmes, même si certains cas simples, traités en mécanique du point, semblent être résolus avec une seule des 2 parties. En règle générale, il n'est pas possible de traiter séparément les deux aspects (forces et moments): il s'agit bien d'un problème complexe à 6 dimensions.
D'autre part, la statique du solide, et plus généralement des mécanismes, prend en considération les « efforts transmissibles » dans une liaison mécanique. L'étude de ces liaisons donne a priori et sans équivoque certaines caractéristiques des forces et moments des actions entre solides. L'objectif étant la détermination complète de tous ces efforts inconnus.
L'objectif de la mécanique est la détermination de tous les efforts appliqués à un système, à partir de la connaissance d'une partie d'entre eux. En ce qui concerne les mécanismes, il s'agit en plus de connaître les charges subies dans toutes les liaisons. Le mécanicien n'a a priori aucune information sur la disposition réelle de ces efforts. Cependant, pour chaque liaison, dont on connait le comportement, certaines composantes (forces ou moments) sont nulles ou au contraire transmissibles. C'est ainsi qu'on peut dire que la réaction d'un support plan sur un pavé est une force obligatoirement perpendiculaire au contact s'il n'y a pas de frottement. Lorsque l'étude est terminée, on peut décrire chaque effort de liaison qui devient alors l'effort effectivement transmis.
Statique du solide dans les problèmes plans
Hypothèse des problèmes plans
Un solide est un volume, une portion d'espace à trois dimensions. Pourtant, dans un certain nombre de cas, on peut utiliser la géométrie plane pour résoudre les problèmes : lorsque les vecteurs force n'ont que deux composantes. Nous supposerons que ce plan est le plan (O, x, y ).
Cette simplification est possible si :
- les vecteurs force sont tous parallèles au plan (x, y ) ;
- les efforts sont appliqués de manière symétrique par rapport au plan (O, x, y ).
Notons qu'un couple peut se décrire comme deux forces opposées. Comme les vecteurs forces sont dans le plan (x, y ), les vecteurs moments sont nécessairement d'axe z. On peut donc exprimer les moments comme un scalaire, positif si le vecteur moment est dans le sens de l'axe z, négatif dans le sens contraire.
Liaisons mécaniques
Sous l'hypothèse de problème plan, les actions mécaniques transmissibles sont au nombre de trois : forces selon x et y, moment selon z. Il y a donc au plus trois degrés de liaison. certaines liaisons mécaniques deviennent ainsi équivalentes ; par exemple, une rotule peut transmettre les mêmes efforts qu'un pivot d'axe z.
On ne se sert donc en pratique que de trois liaisons mécaniques parmi les dix liaisons élémentaires :
- la liaison sphère-plan de normale parallèle au plan, ou liaison ponctuelle, ou appui simple, qui supprime une translation ;
- la liaison pivot d'axe perpendiculaire au plan, ou articulation, qui supprime les deux translations ;
- la liaison glissière d'axe parallèle au plan, qui ne laisse qu'une translation.
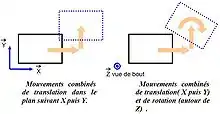
Ces trois degrés de liaison servent à bloquer trois degrés de liberté : les translations selon x et y et la rotation selon z. C'est par exemple le cas du système bielle-manivelle en vue de bout de manivelle, du train que la vache regarde passer, du mécanisme d'une montre, … Par contre, il ne faut pas confondre l'hypothèse de problème plan en statique avec l'hypothèse de problème plan en cinématique ; l'hypothèse de problème plan en dynamique regroupant les deux.
Si les liaisons sont parfaites, alors nous disposons d'informations supplémentaires sur les efforts transmissibles dans ces liaisons, à savoir :
- liaison sphère-plan : le point d'application et la droite d'action connus ; l'intensité dépend des autres efforts ;
- liaison pivot : le point d'application est connu, la droite d'action passe nécessairement par ce centre, mais sa direction et l'intensité sont à déterminer ;
- liaison glissière : la direction de la force est connue, perpendiculaire à la translation autorisée ; l'intensité et le point d'application sont à déterminer ; remarquons que l'on peut aussi considérer que le point d'application est au centre et que la liaison transmet un couple.
Ces données sont à inscrire dans le bilan des forces extérieures à un solide. L'étude aboutira à l'identification de toutes les forces effectivement transmises (incluses dans l'ensemble des forces transmissibles) à savoir, pour chaque force, son point d'application, sa droite d'action, son sens et son intensité.
Méthode graphique
De nombreux problèmes plans peuvent se résoudre par une méthode graphique ; le seul cas problématique étant la présence d'un couple. Ces méthodes graphiques s'avèrent plus rapide que la méthode analytique, bien plus simple lorsque le nombre de forces est réduit, et finalement relativement précise (le précision dépendant de l'échelle adoptée).
Dans ce contexte, les actions mécaniques sont représentés par des vecteurs force. Ce qui amène à considérer pour chaque action :
- un point d'application ;
- une direction (donc une droite d'action) ;
- une intensité (orientée sur la droite d'action).
L'étude n'est terminée que si ces trois caractéristiques (point, droite et vecteur) sont définis pour chaque force. Quelques rares cas ne demandent pas une étude complète.
Lorsque le problème comprend un effort de type couple, alors la résolution est partiellement analytique.
Moments et couples de forces
Sous l'hypothèse de problème plan, l'expression du moment peut être modifiée. On ne considère plus les rotations autour d'un axe mais seulement dans la direction Z soit en fait autour d'un point (c’est-à-dire autour d'un axe de direction Z passant par le point considéré). Une seule composante étant non nulle, la représentation vectorielle devient scalaire.
Moment d'une force
L'équilibre d'un solide signifie qu'il ne bouge pas (dans un référentiel donné) soit :
- aucune translation ;
- aucune rotation autour de quelque point (ou pivot) que ce soit.
On peut alors considérer la capacité d'une force à faire tourner le solide autour d'un point donné. Cette grandeur est appelée moment de force. Il n'y a pas nécessité de pivot réel. Ce moment dépend de plusieurs facteurs : l'intensité de la force, les positions relatives de la force et du point.
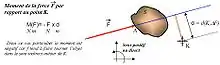
M(F)= +/- d.F (en N m) où d bras de levier, est la distance (minimale) entre le point et la droite d'action de la force. le signe est apprécié suivant que la force tend à faire tourner dans le sens direct (x vers y) ou indirect (y vers x). Avec d'autres modèles tels que le torseur, le choix du signe ne se pose pas; il est directement déduit des calculs, et son sens est lié à l'orientation de l'espace (trièdre direct).
Il est intéressant de voir à présent les cas de nullité du moment d'une force. De l'équation ci-dessus, on en déduit aisément deux :
- la force est nulle. Sans intérêt puisqu'il n'y plus de force ;
- la distance d est nulle : ce qui signifie que le point de pivot se trouve sur la droite d'action. Cette propriété géométrique sera exploitée par la suite.
Couple de forces
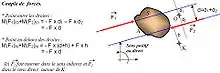
Si 2 forces opposées (donc de même intensité), s'appliquent sur un même corps suivant deux droites d'action distinctes (donc strictement parallèles) et distantes de d, on imagine sans mal que ces forces se compensent, cependant l'équilibre du corps semble ne pas être assuré. Cette disposition est appelée couple de forces. Pour vérifier cela, en appliquant la méthode vue ci-dessus, calculons la somme des moments de ces 2 forces, en différents points de l'espace.
Dans tous les cas cette somme a une même valeur C = - d.F . On appelle couple cette valeur indépendante du point de pivot considéré. Derrière l'appellation couple, les forces disparaissent (puisqu'elles se compensent). En réalité, dans la nature, un couple (sans forces pour le générer) n'existe pas. L'intérêt du couple est cette résultante nulle. Chacun aura fait l'expérience de desserrer une roue de voiture avec une manivelle (force unique et moment de force par rapport à l'axe de la vis) qui ripe facilement, ou avec une croix (2 forces opposées qui forment un couple) assurant non seulement une plus grande intensité de desserrage mais aussi une meilleure stabilité de l'outil. Dans un moteur électrique, le bobinage est tel qu'il existe toujours deux "bouts de fil" symétriquement disposés par rapport à l'axe de rotation et parcourus par des courants induisant deux forces de Laplace opposées, soit un couple élémentaire.
Plus généralement un couple est la somme non nulle de moments de forces dont la résultante s'annule. Pour la suite, chaque couple annoncé ne fera plus apparaître les forces qui le génèrent.
Cas d'équilibre à 2 forces
Ce cas élémentaire permet de montrer comment un problème de statique ne dissocie pas forces et moments. Non seulement l'étude permet la détermination de l'ensemble des forces, mais aussi les conditions géométriques de l'équilibre. Pour cette étude de cas, comme pour les suivantes, le principe fondamental de la statique nous donne les relations suivantes :
- aucun mouvement de translation possible: somme des forces extérieures nulle ;
- aucun mouvement de rotation possible: somme des moments des forces extérieures nulle (moments calculés en un même point qui peut être choisi arbitrairement).
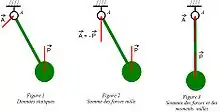
Soit l'étude d'un pendule: la figure 1 ci-dessous donne une position quelconque. L'objectif est la détermination des conditions d'équilibre. le bilan des actions extérieures nous donne :
- le poids appliqué au centre de gravité de valeur connue ;
- le pivot (ou articulation) parfait en A. la droite d'action passe par l'axe, mais est de direction inconnue.
L'équation d'équilibre relative aux forces donne donc: Ce qui définit l'action dans le pivot de façon univoque, les deux forces formant alors un couple. La position proposée (figure 2) n'est donc pas une position d'équilibre.

L'équation des moments, par exemple calculée au point A, nous donne: soit


Ce qui revient à dire que A appartient à la droite d'action du poids. Nous aurions abouti à la même conclusion, peut être plus difficilement, en calculant les moments en n'importe quel point. En règle générale, le point de calcul des moments doit être choisi sur un critère de simplicité de calcul. Ici A ou G (centre de gravité) assurent l'annulation d'un des moments de force.
De ce fait les seules positions d'équilibre sont celles ou le pendule est vertical, en dessous (position stable) ou au-dessus de l'axe (position instable).
En résumé, pour qu'un solide soumis à deux forces soit en équilibre :
- les deux forces sont opposées (équation vectorielle des forces) ;
- même droite d'action pour les deux forces (équation du moment) ;
Pour la résolution graphique d'un problème de statique ces conditions géométriques sont équivalentes à l'énoncé du principe fondamental de la statique.
Cas d'équilibre à 3 forces

C'est certainement le cas le plus fréquent dans les mécanismes peu hyperstatiques. Comme dans l'étude précédente, l'application simultanée des 2 théorèmes permet de déterminer à la fois les forces mais aussi leur disposition.
Considérons le cas de la poussette maintenue dans une descente par le seul frein sur la roue avant, la roue arrière étant libre. Seul le poids de la poussette est connu.
Un premier bilan des actions extérieures fait état de :
- poids appliqué au centre de masse G. Donné ;
- l'action du sol sur la roue avant, appliquée au point A.Direction inconnue ;
- l'action du sol sur la roue arrière, appliquée au point B. Une étude préliminaire (équilibre de la roue arrière seule) montrerait (cas précédent d'un solide soumis à deux forces) que cette action est forcément perpendiculaire au sol (y compris avec la considération de frottement au contact du sol et à condition que le pivot de roue soit parfait).
Il semble difficile d'établir la somme nulle des forces puisque deux d'entre elles sont inconnues. Toutefois on peut écrire : . Géométriquement cela se traduit par la construction d'un triangle fermé, dont un seul côté est pour l'instant parfaitement défini.

Au moins deux droites d'action sont ici connues: celles de l'action en B et du poids. Elle concourent en un point qu'on notera K. Leurs moments respectifs en K sont donc nuls. Si on applique le théorème en ce point K, on obtient :

soit d'où


Nécessairement K appartient à la droite d'action en A. Ce qui revient à dire que les trois droites sont concourantes en K. On connait désormais la direction de la droite d'action en A.
Revenons à la première équation; il est possible alors de construire le triangle. En traçant en premier le poids connu, on reporte à chaque extrémité une droite respectivement parallèle aux droites des deux autres actions. Le triangle se forme alors et le relevé des longueurs des côtés donne le résultat. Cette méthode impose même le sens des actions mécaniques. Il resterait à vérifier que l'action en A satisfait les lois de Coulomb sur le frottement pour valider l'équilibre.
En résumé : pour un système soumis à 3 forces extérieures, dont 2 concourantes :
- les vecteurs force forment un triangle fermé (équation des forces) ;
- toutes les droites d'action sont concourantes.
Si les deux droites connues n'avaient pas été concourantes, alors elles auraient été parallèles. Ce qui revient au cas du levier donné plus haut. Dans le cas de force parallèle un calcul est nécessaire (relatif à l'écriture des moments) pour déterminer une relation entre les intensités des forces.
Cas d'équilibre à 2 forces et un couple
Si un solide est soumis à deux forces (de point et droites d'actions distincts), et un couple de force (donc action de force résultante nulle), de l'équilibre selon le principe fondamental de la statique découlent les conséquences suivantes :
- les deux forces sont opposées et constituent donc un couple de forces.
- les deux couples de forces s'annulent.
Par exemple, une dynamo actionnée par une manivelle: les bobinages induisent un couple dont l'intensité est en rapport avec le courant électrique généré. L'action sur la manivelle, qui dans le cas le plus favorable, est circonférentielle (tangente au cercle décrit par la main). Enfin, la manivelle est liée au bâti par un guidage suivant une liaison pivot dont la force transmissible est appliquée sur l'axe. De la première relation on déduit la direction de l'action du palier, qui tourne avec la main; de la deuxième on établit alors la relation entre l'action du pousseur et le couple d'origine électrique.
Cas des liaisons mécaniques avec frottement
Le frottement a une influence sur le comportement statique des liaisons mécaniques. Certains modèles comme les lois de Coulomb décrivent ce comportement. De ce fait, même si cela complique le problème, non seulement ça n'induit pas d'inconnue statique supplémentaire, mais dans certains cas, cela en diminue le nombre.
La considération du frottement est parfois obligatoire pour la résolution d'un problème, comme l'équilibre d'une échelle, ou le dimensionnement d'un embrayage.
Statique du solide dans les problèmes à 3 dimensions
C'est par exemple, le cas d'un arbre participant à un engrenage à denture hélicoïdale, un système de renvoi d'angle, ou pourquoi pas un pédalier de bicyclette quand on s'intéresse aux conséquences de pédales trop écartées.
Formalisme des torseurs
Le torseur propose une écriture globale et unifiée des efforts (forces et moments) qui s'exercent sur un système (généralement un solide). De tels torseurs sont généralement nommés torseurs des efforts. Ce formalisme est certes lourd à manipuler à la main et gourmand en papier, mais il permet la résolution systématique de problèmes de mécanique statique et se prête bien à la modélisation et au traitement informatique. De par sa forme analytique, il autorise surtout une modélisation paramétrée d'un problème, ce qui donne accès par exemple à toutes les positions d'un mécanisme, contrairement à l'étude graphique plus rapide, mais qui doit être refaite pour chaque cas et qui est beaucoup moins précise.
Une force est parfaitement définie quand on connaît le vecteur force (appelée aussi résultante) et le point d'application (où son moment s'annule). La notion d'effort, en particulier les efforts de liaison, est bien plus large, et le torseur permet la description de tous les cas.
Le torseur d'action mécanique
Le torseur d'effort, dans sa forme développée donne ces éléments de réduction à savoir :
- la résultante sans précision de point d'application. C'est la somme vectorielle des actions élémentaires de contact ou à distance ;
- le moment par rapport à un point arbitrairement choisi. C'est la somme vectorielle des moments des forces élémentaires de contact ou à distance. Sauf cas particuliers, le moment du torseur n'est pas le moment de la résultante (ex. : le torseur couple possède une résultante nulle et un moment non nul). C'est sur cette nuance que reposent les principales difficultés de la modélisation d'efforts par les torseurs.
Il faut considérer 3 niveaux d'écriture de torseur :
- écriture globale: sans distinction de point; Le torseur est l'association de 2 champs de vecteurs sur l'espace (tous les points). La relation de Varignon est donc « intégrée » à cette notation. On n'utilise cette notation qu'au moment du bilan des actions mécaniques ou dans le cadre d'explicitation de réaction ;
- éléments de réduction: force ou résultante et moment exprimé en un point (arbitrairement choisi) . On utilisera cette forme pour définir en préambule la disposition particulière des actions mécaniques. Il est possible d'effectuer la somme de torseurs à ce niveau. Les moments de tous les torseurs doivent alors être exprimés au même point ;
- composantes des éléments de réduction explicitées dans une même base, avec point particulier pour le moment. Présenté sous forme de matrice (souvent 3 lignes, 2 colonnes), cet outil permet d'effectuer simultanément les sommes de forces et de moments (exprimés au même point). Ces composantes sont autant d'inconnues pour les équations à résoudre.




Exemples d'actions mécaniques représentées par des torseurs
- Force appliquée sur S au point A dans la direction (même forme en tout point de la droite d'action):


- Couple autour de la direction x: en TOUT POINT M :


- Liaison ponctuelle en A suivant Y: en A :


- Liaison pivot d'axe (B,x): (même forme en tout point de l'axe) :

- Torseur de cohésion à l'abscisse x d'une poutre (action du tronçon[x,L] sur le tronçon[0,x])
- en G(x) :

Ce torseur effort représente les efforts transmis à travers la section S(x) d'une poutre. Il est calculable en isolant la partie amont (tronçon[0,x]). Il est toujours défini au centre d'inertie G(x) de la section considérée S(x). Artifice de calcul utilisé en résistance des matériaux. Ainsi les efforts subis à l'intérieur de la pièce deviennent extérieurs pour le tronçon isolé, permettant l'application du principe de la statique.
Résolution de problème de statique 3D
Avec le formalisme des torseurs, le principe fondamental de la statique (PFS) s'exprime de la manière suivante
- Si un système matériel est en équilibre sous l'effet d'actions mécaniques modélisées par les torseurs ; ; …, alors la somme de ces torseurs est égale au torseur nul.


Soit

- La réciproque (somme des torseurs nulle équilibre) est fausse. Dans beaucoup d'ouvrages, le principe fondamental de la statique est écrit à l'envers.

Cette relation se généralise en dynamique, en définissant un torseur dynamique qui réunit, sur le même principe, l'accélération et le moment dynamique d'un solide dans un même objet mathématique. Les lois du mouvement de Newton permettent alors d'écrire les relations qui relient le torseur dynamique aux torseur des efforts extérieurs.
Écrit dans la forme la plus développée, l'équilibre du système donne 6 équations dont les inconnues sont les composantes de chaque torseurs d'actions extérieures.
Méthode de résolution d'un problème de statique avec l'outil torseur
La résolution d'un problème de statique ne diffère pas beaucoup des autres méthodes.
- Inventaire des actions extérieures: chaque action est définie par ses éléments de réduction avec toutes les propriétés particulières explicitement écrites (directions, point particulier...)
- Transports des moments: C'est l'étape la plus délicate surtout si le problème est complexe. Il faut choisir un point qui permette l'écriture la moins compliquée pour les moments. Cela dit, n'importe quel point fait l'affaire. L'expérience est seule conseillère en la matière. Dans le cas d'un problème classique, on choisira le point de définition du torseur de liaison le plus complet, ou un point de concours d'axes de liaisons.
- Équations d'équilibre: les 6 équations (pour un système isolé) alors données par le principe fondamental de la statique peuvent être posées. Il en résulte un système d'équations dont les inconnues sont :
- certaines actions extérieures (celles qu'on veut déterminer) ;
- les composantes transmissibles dans les liaisons ;
Pour de nombreux problèmes, il est souvent nécessaire d'isoler plusieurs systèmes ce qui multiplie le nombre d'équations disponibles, mais aussi le nombre d'inconnues.
Théorème de la résultante (3 équations)

Théorème du moment (3 équations)

Rappel: tous les moments étant exprimés au même point.
Résolution du système d'équations
Un problème de statique disposera au mieux d'un nombre d'équations égale à 6 fois le nombre de pièces. Malheureusement, l'isolement d'un seul ensemble d'un mécanisme ne suffit généralement pas, le nombre d'inconnues de liaisons étant facilement supérieur à 6. Il faut donc choisir d'autres sous systèmes afin d'obtenir de nouvelles équations d'équilibre (au risque d'ajouter de nouvelles inconnues de liaison) ; il n'est pas rare d'avoir à résoudre un système à 18 voire 24 équations sur un mécanisme simple. Le graphe des efforts est un outil d'aide à la décision du choix des systèmes mécaniques à isoler pour obtenir le système le moins coûteux en calcul.
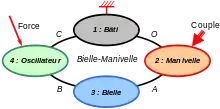
Sur l'exemple ci-contre, l'étude de l'équilibre de la manivelle permet d'établir la relation entre le couple extérieur et les actions de liaison (6 équations). Ensuite l'« isolement » de l'ensemble {bielle+oscillateur} permettra (peut-être) le rapprochement avec F (soit 12 équations). En réalité il faudra aussi isoler la bielle (18 équations en tout). De plus ce problème peut comporter plus d'inconnues que d'équations, et un premier travail consistera à éliminer des inconnues de liaison par des considérations de jeu dans les liaisons. L'étude statique des mécanismes relève donc de la compétence du constructeur en mécanique qui mêlant à la fois connaissances technologiques et physiques.
Cependant dans de nombreux problèmes (isostatiques), on voit apparaître deux systèmes d'équations indépendants :
- une partie concerne la relation entrée/sortie qui lie les actions motrice et réceptrice (souvent une seule équation). Cette partie concerne les efforts fournissant une puissance ;
- le reste peut s'appeler équations de liaisons qui renseignent sur les efforts (auparavant transmissibles et désormais effectifs) de guidage et qui s'expriment en fonction des efforts précédents. La puissance de ces interactions est nulle si les liaisons sont parfaites.
Selon les besoins, il n'est pas nécessaire de résoudre l'ensemble des équations. La méthode dite des puissances virtuelles permet de séparer mathématiquement ces deux groupes d'inconnues.
Dans le cas des systèmes hyperstatiques, le nombre d'équations demeure insuffisant. Alors, on a recours à l'élimination d'inconnue par des considérations de jeu dans les liaisons, ou alors à l'écriture de nouvelles équations en posant l'étude du comportement élastique de certaines pièces.
Notes et références
Annexes
Articles connexes
 Portail de la physique
Portail de la physique  Portail du génie mécanique
Portail du génie mécanique