Usage des robots
La robotique possède de nombreux domaines d'application. À l'origine, les robots sont installés dans les industries (dès 1961) pour réaliser des tâches répétitives avec une précision constante.
Désormais, depuis 2000 au moins, les robots sont implantés dans presque toutes les industries, pour tous les usages.
Agriculture
Un robot agricole est un robot conçu pour accomplir certaines tâches dans le domaine de l'agriculture et de l'horticulture. Le principal domaine d'application des robots en agriculture est celui des récoltes.
Industrie
Les robots sont intensivement utilisés dans l'industrie, où ils effectuent sans relâche des tâches répétitives et avec rigueur. Dans les chaînes de montage de l'industrie automobile, ils y remplacent les ouvriers dans les tâches pénibles et dangereuses (peinture, soudage, emboutissage, etc.). Les robots industriels sont souvent munis de systèmes de vision qui leur procurent une souplesse d'exécution et des moyens de vérifier la qualité des produits fabriqués.
Air-Cobot est un robot mobile collaboratif conçu pour effectuer le contrôle non destructif de l'extérieur d'un avion sur l'aéroport ou dans une usine[1],[2].
Médecine
Ce que l'on nomme robot médical est en réalité, en 2009, plutôt un outil très performant, piloté par le médecin[3].
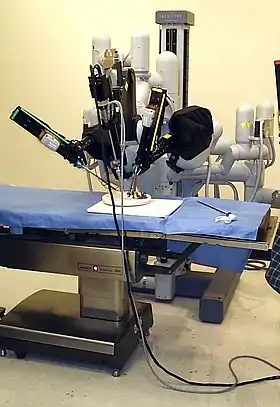
Le robot Da Vinci est un robot médical qui peut opérer et diagnostiquer les patients. 1242 exemplaires étaient utilisés dans le monde en [4].
Le robot Cyberknife permet d'effectuer divers traitements de radiothérapie. Plus de 150 exemplaires étaient utilisés dans le monde début 2009.
Il existe également le robot Niobe de Stereotaxis qui permet de réaliser des procédures d'ablation par radiofréquence (brûler les voies anormales à l'intérieur du cœur) en électrophysiologie. 159 exemplaires sont déjà installés dans le monde et plus de 44 000 procédures ont déjà été effectuées depuis sa création (2002)[5].
Exploration spatiale

Depuis Lunokhod 1, les scientifiques ont pris le parti d'envoyer des robots pour explorer le système solaire, dans des environnements souvent mortels pour l'homme.
Dans le cadre de la mission Mars Exploration Rover, les robots Spirit et Opportunity parcourent Mars pour transmettre les informations obtenues grâce à leurs nombreux capteurs vers la Terre.
L'autonomie d'un robot d'exploration spatiale est obligatoire, et doit être d'autant plus grande qu'il est éloigné de la Terre, du fait du temps qui s'écoule entre l'envoi d'une commande depuis la Terre, et la réception de cette commande par le Robot. Celui-ci doit donc être capable de réagir tout seul aux évènements qui peuvent surgir dans cet intervalle de temps.
Militaire
Un robot militaire est un robot, autonome ou contrôlé à distance, conçu pour des applications militaires. Les drones sont une sous-classe des robots militaires.
Des systèmes sont déjà actuellement en service dans un certain nombre de forces armées, avec des succès remarquables, tel que le drone Predator, qui est capable de prendre des photographies de surveillance, et même à lancer des missiles au sol, pour les drones de combat. Les études se poursuivent car ce type d'engin offre des possibilités prometteuses.
Selon une étude de WinterGreen Research parue récemment et intitulée "Les systèmes de plateforme de robot terrestre mobile militaire pour faire face aux terroristes : parts de marché, stratégies, et prévisions mondiales, 2015-2021", le marché mondial des robots militaires terrestres va plus que tripler entre 2014, où le chiffre d'affaires du secteur a été de 3,2 milliards de dollars, et 2021, où il pourrait atteindre 10,2 milliards de dollars[6].
Loisirs
Le secteur de la robotique ludique est en plein développement depuis 2009, principalement au Japon et en Corée du Sud.
Sony fut un précurseur sur le marché, avec son robot Aibo qui fut commercialisé de 1999 à 2006. Sony a depuis cessé tout développement de robots ludiques faute de rentabilité. En 2009, Aldebaran Robotics développe le Nao.
Le robosapien est un des robots ludiques les mieux vendus au monde en 2009, avec plus de cinq millions d'exemplaires[7].
Le robot AISoy1 de la société espagnole AISoy Robotics est à la limite du ludique et du social. Il utilise l'intelligence artificielle.
Domestique
Les robots domestiques sont des robots au service des particuliers, pour les aider dans leurs tâches ménagères. Il existe par exemple des robots aspirateurs, des robots tondeuse à gazon...
Le robot roomba est en 2009 l'un des robots les plus vendus au monde avec plus de trois millions d'exemplaires[7].
Dessin

Un robographe est un robot qui produit un texte ou un dessin en imitant les gestes d'un humain.
On peut voir de nos jours des procédés innovants pour programmer des robots industriels en utilisant la capture de mouvement. À l'aide d'une tablette tactile, l'utilisateur effectue son dessin. La gestuelle de sa main est alors captée et renvoyée au robographe qui restitue fidèlement le dessin dans l'ordre chronologique.
Avec ce procédé, on peut ainsi réaliser des séries de robographies numérotées et signées par l'auteur. Ce procédé contribue à préserver la gestuelle des opérateurs experts dans un métier, le chef d'orchestre, le dessinateur ou le peintre dans le monde du traitement de surface.
Musique


En première mondiale le un robot industriel FANUC ROBOTICS a dirigé deux morceaux classiques face à un ensemble instrumental à cordes à PARIS à la Cité des Sciences et de l'Industrie. Les morceaux joués étaient l'Andante festivo de Sibelius, et les Danses roumaines de Bartok.
Le procédé utilisé a été la capture de mouvement. Ce procédé est déjà utilisé dans le monde du jeu vidéo et du cinéma. Ainsi le bras robot reproduit les mouvements du chef d’orchestre préalablement enregistrés.
Pendant la séance de captures de mouvements, des marqueurs blancs sont positionnés sur un joystick et tenu par la main. Les mouvements de ces capteurs sont analysés grâce à un dispositif de caméras optiques et traduites en coordonnées 3D. Ces coordonnées permettent la programmation du bras robot qui restitue à l’identique les mouvements du vrai chef d’orchestre et peut réinterpréter fidèlement l'œuvre le jour du concert en autonomie complète. Toute la dimension et la crédibilité prennent tout son sens lors du concert. Les musiciens sont concentrés sur les départs, les terminaisons, les rubatos et nuances et doivent suivre la cadence de la gestique du robot pour être synchronisés. Le résultat procure une liberté dans l'interprétation et les morceaux joués prennent toute leur authenticité.
En comparaison on peut noter la différence du procédé utilisé par le constructeur automobile HONDA avec le robot humanoïde ASIMO qui a dirigé l'orchestre symphonique de Détroit.
Il faut remarquer toutefois que la gestuelle du robot était une programmation robotique et ne restituait pas toutes les subtilités d'un mouvement d'un bras humain.
L'idée intéressante à l'avenir est de pouvoir numériser la gestuelle de tous les grands chefs d'orchestre afin de les mémoriser pour les générations futures. À un niveau pédagogique cela permet d'expliquer à quoi sert véritablement un chef d'orchestre et que son rôle n'est pas une simple représentation. En aucun cas on ne peut actuellement remplacer un humain pendant les phases de répétitions avec les musiciens. L'intelligence artificielle des robots est bien insuffisante pour corriger en temps réel des erreurs d'interprétation.
BEAM
L'approche des robots BEAM (acronyme de « Biologique Électronique Esthétique et Mécanique ») est de type « bottom-up », dont la conception est la plus simplifiée possible, recyclant des composants. Ce sont des robots peu intelligents, au sens où ils n'ont pas de microcontrôleurs ou de programmes embarqués leur dictant un comportement complexe; à la place, ils fonctionnent plutôt par réflexes[8]. Ce type de robot est accessible aux amateurs tant sur le plan technique que sur le plan financier, et se veut une façon de débuter et d'apprendre la robotique[8].
Recherche ou compétition
Ce sont des robots qui n'ont pas d'intérêt hors de la compétition à laquelle ils participent, ou du projet de recherche auquel ils sont intégrés. Ils sont donc éphémères et produits en peu d'exemplaires. Le robot Stanley a ainsi remporté la compétition DARPA Grand Challenge en 2005.
Le robot ASIMO, conçu et fabriqué par Honda, est un des robots de recherche les plus évolué en 2009. Il est ainsi capable d'accomplir de nombreuses tâches dans un environnement inconnu et parmi les êtres humains. Il pourrait dans quelques années être commercialisé comme robot de compagnie afin d'aider les personnes âgées ou handicapées.
La société Willow Garage a développé le robot PR2 dont le système d'exploitation, Robot OS, est distribué sous licence libre. Le robot est en vente depuis 2010, à destination principalement d'universités.
Références
- « Air-Cobot : un nouveau mode d'inspection visuelle des avions », sur competitivite.gouv.fr, Les pôles de compétitivité (consulté le )
- « Le projet Air-Cobot suit son cours », Air et Cosmos, (lire en ligne, consulté le )
- (en)https://www.newscientist.com/article/mg20427313.400-surgical-robots-at-large-in-the-path-lab.html
- (en) FAQ sur intuitivesurgical.com
- (en) « Arrhythmia treatment / Robotic Catheter Ablation - Stereotaxis », sur Stereotaxis (consulté le ).
- « Le marché de la robotique militaire terrestre va exploser, selon une étude américaine », sur La guerre des robots (consulté le )
- 3e page du dossier sur la domotique sur futura-sciences.com, consulté en novembre 2009
- (en) Eric Seale, « Définition sur encycloBEAMia » (consulté le )