wikiHow es un "wiki", lo que significa que muchos de nuestros artículos están escritos por varios autores. Para crear este artículo, 57 personas, algunas anónimas, han trabajado para editarlo y mejorarlo con el tiempo.
En este artículo, hay 7 referencias citadas, que se pueden ver en la parte inferior de la página.
Este artículo ha sido visto 55 658 veces.
¿Quieres aprender a construir tu propio robot? Hay diferentes tipos de robots que puedes hacer tu mismo. La mayoría de personas quieren ver un robot realizando una tarea sencilla, como moverse de un punto A a un punto B. Puedes hacer un robot hecho completamente de componentes analógicos o comprar un kit de iniciación. Proyectos como este pueden ser una gran actividad familiar para los fines de semana.
Pasos
Método 1
Método 1 de 3:Construir un robot ambulante
-
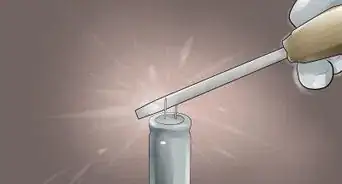
1Prepara las llantas. Usa dos ejes de motor como ruedas y tubos termorretráctiles como llantas. Encaja el tubo termorretráctil en la rueda del motor original. Corta una pieza de tubo solo un poco más larga que cada rueda. Hazla encajar en la rueda y retráela usando un encendedor o un cautín. Tal vez debas poner unas capas más para incrementar el diámetro de las llantas. [1]
-
2Pega con goma los interruptores SPDT en la parte trasera del compartimiento de baterías. Este compartimiento debe soportar 3V o 2 pilas AA. Los interruptores son llamados “de acción rápida”. Pégalos parte trasera inferior del compartimiento de baterías, en la parte plana por donde salen los cables. Posiciona los interruptores en ángulo en las esquinas: los contactos más alejados de la barra de metal que parece una palanca deben tocarse en el centro del compartimiento.
- Las palancas, que son interruptores en sí, deben estar por fuera, cerca de los cables. [2]
-
3Coloca la tira de metal. Esta tira actuará como soporte del motor. Asegúrate de que no haga contacto con los pines del interruptor. Coloca la tira de aluminio de 2,5 – 7,5 cm (1’’ x 3’’) justo detrás de los interruptores. Céntrala, y luego dobla el exceso en un ángulo de 45°. Pega la tira en su lugar con pegamento caliente. Deja que seque antes de continuar.[3]
-
4Sujeta los motores a las alas de metal. Usando pegamento caliente, sujeta los motores a las secciones dobladas de metal, de modo tal que las llantas toquen el suelo. Presta atención a las marcas de carga en los motores, ya que las llantas necesitan ir en dirección contraria. Asegúrate de que un motor esté puesto “al revés” en relación al otro.
- Asegúrate de que los pines del motor no hagan contacto con la tira de metal.[4]
-
5Forma la rueda trasera. Necesitarás una rueda trasera para que el robot no se arrastre. Toma un clip grande y forma con él el contorno de una casa, con una cuentecilla de tamaño medio en la parte superior. Colócala en el lado opuesto de donde salen los cables y pega los terminales del clip a los costados del compartimiento de baterías con goma caliente.[5]
-
6Suelda el robot. Usa un cautín y soldadura para conectar todos los cables entre los componentes del robot. Esto debe hacerse con cuidado, ya que una mala conexión haría que el robot deje de funcionar. Hay muchas conexiones que tendrás que hacer:
- Suelda el pin final de un interruptor con el pin final del segundo. (El pin final es el que está justo debajo de la palanca del interruptor).
- Suelda el pin central en un interruptor al pin central del segundo interruptor.
- Suelda una pequeña pieza de cable a uno de los pines “+” de uno de los motores. Suelda este cable al pin que queda libre del interruptor adyacente.
- Suelda una pequeña pieza de cable en el pin “-“ del otro motor. Suelda este cable al pin que queda libre del interruptor adyacente.
- Suelda un cable largo entre las conexiones restantes de los motores (conectando ambos motores entre sí).
- Toma el cable positivo del compartimiento de batería y suéldalo al pin final del interruptor.
- Toma el cable negativo del compartimiento de batería y suéldalo al pin “-“ de un motor.[6]
-
7Crea antenas para el robot. Estas antenas pueden ser cualquier cosa que actúe como la extensión de los brazos de los interruptores. Pueden estar hechos de clips. Dóblalos de forma tal que parezcan antenas de insectos.[7]
-
8Sujeta las antenas. Sujeta las antenas a los interruptores usando los conectores de horquilla y pegamento (si es necesario). Deberían sujetarse o deslizarse sin problemas.[8]
-
9Enciéndelo colocando las baterías. El robot debe moverse de la misma forma en que lo hace un Roomba (aspirador robótico), solo que no limpiará tu piso.[9]
- Si quieres, puedes programar un control remoto a partir del control de carritos que usan este dispositivo, de forma tal que puedas encender tu robot a distancia.[10]
Anuncio









Método 2
Método 2 de 3:Usar un kit de iniciación
-
1Investiga kits de iniciación. Hay muchos diferentes tipos de kits de iniciación para construir diferentes robots. Hay ciertos kits diseñados específicamente para que los niños lo entiendan. Estos kits no deben disuadir a los adultos que quieran una introducción. Los precios para estos kits varían entre $ 20 y $ 600.
-
2Escoge un kit para principiantes. Estos kits están diseñados para “dar la bienvenida” a quienes que no estén familiarizados con codificar y soldar. Los dos grandes kits robóticos comerciales para niños y principiantes son Mindstorm y Vex. Estos kits se consiguen normalmente en tiendas de juguetes o en línea.[11]
- Hay diferentes versiones de Mindstorm. Si buscas un Mindstorm más asequible, busca versiones anteriores en línea.
-
3Descarga el lenguaje de programación. Para estos kits, hay lenguajes de acompañamiento que usan un código de programa. Usarás una versión elemental de Labview o RobotC. Ambos lenguajes son similares y te prepararán para lenguajes más desafiantes.
- Cuando compres un kit de iniciación, incluirá instrucciones detalladas diseñadas para llevarte de la mano. Codificar puede ser abrumador para los principiantes y estos kits ayudan a aliviar esta confusión inicial.[12]
-
4Aprende cómo funcionan los subsistemas. Antes de lanzarte a codificar tu robot, necesitarás entender algunos de los componentes básicos para fabricar uno. El subsistema estructural de un robot es responsable del soporte físico. Actúa como el esqueleto de tu robot. El subsistema de movimiento es responsable del movimiento e incluye motores, engranajes, ruedas y otros componentes. Aprende lo más que puedas acerca de esto antes de invertir mucho tiempo en tu dispositivo:
- Subsistema de poder
- Subsistema de sensores
- Subsistema de control
- Subsistema de lógica[13]
-
5Ensambla tu kit de iniciación. Después de haber hecho la investigación necesaria, estarás listo para montar tu robot. Date el tiempo necesario al momento de ensamblarlo. Algunos kits permiten muchos tipos diferentes de robots. Otros kits tienen un diseño específico que puede ayudar al aspirante a técnico de robots.
-
6Usa una base. Algunas personas quieren resultados inmediatos aunque se manchen las manos. Hay algunos modelos de robots ambulantes diseñados para ser agregados. Cuando hayas comprado la base, puedes fácilmente decorar tu robot ambulante para que parezca uno alto. Las luces son otro añadido fácil que puedes instalar.Anuncio
Método 3
Método 3 de 3:Usar un microcontrolador
-
1Entiende el funcionamiento de los microcontroladores. Los microcontroladores se encuentran en casi todos los dispositivos modernos que usan pantalla LED o son programables. Son computadoras esenciales. Te recomendamos este camino solo si estás dispuesto a pasar tiempo codificando, programando y resolviendo problemas.[14]
-
2Escoge un microcontrolador. Solo considera microcontroladores que tengan memoria flash interna o memoria eeprom. Esto significa que puede borrar y reprogramar múltiples veces. Considera qué tipo de puertos piensas que serán necesarios para tu tipo de proyecto robótico, como usb o fuentes de poder externas.[15]
- Arduino se ha convertido en el estándar para aficionados y expertos. Puedes encontrar un kit de iniciación Arduino en Radio Shack o en línea. Costará entre $ 30 y $ 60. Vendrá con todos los accesorios Arduino básicos que necesitarás para construir un robot.
-
3Reúne otros componentes. Si acabas de empezar, necesitarás una placa de pruebas y una variedad de cables. Además necesitarás capacitores, algunos LED, un limitador y otra placa de pruebas electrónicas.[16]
- Cada proyecto necesitará partes específicas.
-
4Decide qué quieres construir. Existen innumerables aplicaciones para las que puedes usar un microcontrolador. Investiga en línea algunos robots que la gente ha construido usando microcontroladores. Puedes empezar con algo pequeño, como construir un oscilador.
- Practica en algunos proyectos de pequeña escala antes de ir por una creación robótica más grande.
-
5Instala el software de programación. La mayoría de microcontroladores dependen mucho de códigos basados en computadoras. Necesitarás descargar e instalar su software específico. Puedes encontrar toda la información de este lenguaje en su correspondiente sitio web.
-
6Usa ejemplos para empezar. Cada microcontrolador tendrá una comunidad en línea de algún tipo. Cada una tendrá códigos de ejemplo. Úsalos y aprende de ellos. Añade y manipúlalo mientras aprendes lo que estás haciendo.
- El software de Arduino tiene una librería que se encuentra en “file” (archivo) para el menú. Aquí podrás acceder a códigos de ejemplo de una variedad de funciones.[17]
Anuncio
Consejos
- Recuerda que los robots con piernas, a pesar de ser interesantes y extravagantes, son relativamente poco prácticos y en el mejor de los casos se usan como artilugios y muestras de habilidad.
- Puedes crear una carcasa para tu pequeño robot usando cosas de tu hogar y arreglarla para que se vea como tú quieras. Solo ten cuidado de no bloquear las conexiones o ruedas.
Advertencias
- No pongas las baterías en su compartimiento hasta que termines. No querrás electrocutarte.
- Ten cuidado al usar las herramientas.





Referencias
- ↑ http://makezine.com/projects/make-12/beetlebots/
- ↑ http://makezine.com/projects/make-12/beetlebots/
- ↑ http://makezine.com/projects/make-12/beetlebots/
- ↑ http://makezine.com/projects/make-12/beetlebots/
- ↑ http://makezine.com/projects/make-12/beetlebots/
- ↑ http://makezine.com/projects/make-12/beetlebots/
- ↑ http://makezine.com/projects/make-12/beetlebots/
- ↑ http://makezine.com/projects/make-12/beetlebots/
- ↑ http://makezine.com/projects/make-12/beetlebots/
- ↑ http://makezine.com/projects/make-12/beetlebots/
- ↑ http://www.lego.com/en-us/mindstorms/about-ev3
- ↑ http://www.vexrobotics.com/vexedr/products/
- ↑ http://content.vexrobotics.com/docs/inventors-guide/main-2008/vex-inventors-guide-07022008.pdf
- ↑ http://www.instructables.com/id/How-to-choose-a-MicroController/?ALLSTEPS
- ↑ http://www.instructables.com/id/How-to-choose-a-MicroController/?ALLSTEPS
- ↑ https://www.arduino.cc/en/Tutorial/ArduinoToBreadboard
- ↑ https://www.arduino.cc/en/Tutorial/LibraryExamples
Acerca de este wikiHow
Para construir un robot simple que sea capaz de moverse por su cuenta, debes comprar un kit de inicio o ensamblar los componentes que necesitas de un proveedor de productos electrónicos. Necesitarás un microcontrolador, (una computadora pequeña que servirá como el cerebro del robot), un par de servomotores de rotación continua para impulsar las ruedas, ruedas que se ajusten a los servomotores, una rueda giratoria, una pequeña placa de pruebas sin soldadura para construir tus circuitos, un soporte de batería, un sensor de distancia, un interruptor de botón y cables puente. Pega los servomotores al final del paquete de baterías con cinta adhesiva de doble cara o pegamento termofusible, asegurándote de que los extremos giratorios de los servomotores se ubiquen sobre los lados largos de la batería. Conecta la placa de pruebas a la batería junto a los servomotores con cinta adhesiva o pegamento termofusible. Coloca el microcontrolador sobre el espacio plano en la parte superior de los servomotores y fíjalo firmemente en ese lugar. Presiona las ruedas con firmeza sobre los ejes de los servomotores. Conecta la rueda giratoria a la parte delantera de la placa de pruebas. Esta girará libremente y actuará como la rueda delantera del robot, lo que facilitará que gire y se desplace en cualquier dirección. Conecta el sensor de distancia al frente de la placa de pruebas. Ensambla el robot, conectando los servomotores, el microcontrolador, el interruptor y el paquete de batería a la placa de pruebas. Conecta el microcontrolador a una computadora mediante un cable USB. Carga un programa de control básico de la computadora al microcontrolador. El robot puede avanzar, retroceder, detenerse y alejarse de los obstáculos. Pruébalo sobre una superficie lisa y plana, y experimenta con él para verificar lo que es capaz de hacer. Continúa leyendo para conseguir más consejos (incluido el uso del software Arduino).