مختبر علوم المريخ
مختبر علوم المريخ (بالإنجليزية: Mars Science Laboratory اختصاراً MLS)[6] مسبار كيوريوستي أو كوريوسيتي (بالإنجليزية: Curiosity) وتعني الفضول هو مسبار صممته ناسا بهدف استكشاف سطح كوكب المريخ.[7][8] أُطلقَ في 26 نوفمبر 2011 في الساعة 10:02 بتوقيت شرق الولايات المتحدة، هبط على سطح المريخ في فوهة غيل في 6 أغسطس 2012 على الساعة 05:14 (توقيت غرينيتش).[9][10] المسبار هو مختبر علمي متجول متكامل بحجم سيارة، يحتوي على غرفة من الآلات والأدوات المعقدة، إضافة إلى عربة جوالة يُتحكم بها من بعد.
| مختبر علوم المريخ | |
|---|---|
لوغو مختبر علوم المريخ. | |
| المشغل | وكالة ناسا |
| المصنع | مختبر الدفع النفاث، وبوينغ، ولوكهيد مارتن |
| مساهمون كبار | بوينغ لوكهيد مارتن |
| نوع الرحلة | عربة فضائية |
| تاريخ الإطلاق | 26 نوفمبر سنة 2011 في 15:02:00.211 ت.ع.م[1][2][3] |
| مركبة الإطلاق | أطلس في 541 |
| موقع الإطلاق | قاعدة كيب كانفيرال المنصة إل سي-41 في فلوريدا، الولايات المتحدة[4] |
| مدة الرحلة | 668 يوم مريخي (686 يوم أرضي) |
| التسمية العالمية | 2011-070A |
| الموقع الإلكتروني | الموقع الرسمي لمختبر علوم المريخ |
| الوزن | 900 كغم[5] |
| الطاقة | بطارية نظائر مشعة |


تاريخ
في أبريل 2004 دعت وكالة ناسا إلى تقديم مقترحات أجهزة علمية لمسبار فضائي،[11] واختيرت ثمانية مقترحات في 14 ديسمبر من نفس السنة. وبدأ اختبار وتصميم المكونات أيضا في أواخر عام 2004.
وبحلول نوفمبر 2008 كانت المعدات جاهزة، والبرمجيات تحت الاختبار والتجربة.[12] وتجاوزت التكاليف حينها نحو 400 مليون دولار،[13] وفي الشهر التالي، أعلنت وكالة ناسا تأجيل إطلاق مختبر علوم المريخ إلى أواخر عام 2011 بسبب عدم كفاية وقت الاختبار.[14][15]
وبين 23-29 مارس 2009، اتيح للجمهور فرصة اختيار اسم للروفر من بين تسعة أسماء، من خلال استطلاع للرأي العام على موقع وكالة ناسا،[16] وفي 27 ماي 2009 أعلن عن الاسم الفائز، الذي وقع على كوريوسيتي، (“الفضول” بالعربية) الذي قدمته فتاة في الصف السادس، كلارا ما، من ولاية كانساس.[7][17][18]
تم إطلاق المسبار في صاروخ أطلس 5 من قاعدة كيب كانافيرال في 26 نوفمبر 2011.
في يوم 6 أغسطس 2012 على الساعة 05:14:39 بالتوقيت العالمي، نقلت كاميرا مختبر علوم الفضاء صور تؤكد هبوط المسبار كيوريوستي بنجاح على سطح المريخ. وأرسل المسبار أول صورة لظله على أرض المريخ.[19]
الرحلة
استغرقت الرحلة ثمانية أشهر ونصف، قطع المسبار خلالها مسافة 570 مليون كيلومتر.
مكان الهبوط
يهبط المسبار في منخفض مداري عميق يطلق عليه فوهة غيل، وبه جبل يبلغ ارتفاعه خمسة كيلومترات فوق سطح الكوكب.

و صل المسبار إلى المريخ في 06 أغسطس 2012 بعد 9 شهور من بدء البعثة.
وقد اختيرت له فوهة غيل من بين 100 موقع مرشح للهبوط قامت ناسا بدراستها خلال خمس سنوات.[20] ويرجع اختبار هذا الموقع إلى حقيقة أن هذه الفوهة عميقة، ولا بد في كونها تحتوي على تربة رسوبية من مواد مختلفة من التربة من ضمنها الطفلة وكبريتات يمكن أن تكون تكونت تحت تأثير الماء.[20] ويأمل العلماء المختصون التوصل إلى معارف كثيرة من تلك الطبقات واستنتاج معلومات منها عن الطقس وجو المريخ حاليا أو في الماضي.[20]
نظام الهبوط


يستخدم لهبوط المسبار كوريوسيتي على المريخ نظام دقيق يسمح بالهبوط في المنطقة المرغوبة في حدود 20 كيلومتر.[21] ويحتوي النظام على عدة مراحل تنقسم إلى أربعة:[22][23]

1. الدخول الموجّه: يكون المسبار خلاها مغطى بغطاء يحميه أثناء الرحلة في الفضاء ومن الجو عند الهبوط. ويتكون من واقي حراري يبلغ قطره 4.5 متر. يعمل هذا الغطاء الواقي على تحمل خفض السرعة في جو المريخ من 6 كيلومترات في الثانية إلى نحو 2 ماخ (نحو 680 متر في الثانية), وهي سرعة تسمح بفتح المظلة التي هي مشابهة لمظلات برنامج أبولو.
2. الهبوط بالمظلة: عندما تنتهي المرحلة الأولى للهبوط تنخفض سرعة الكبسولة إل 2 ماخ وتكون قد أصبحت على ارتفاع 10 كيلومتر من سطح المريخ. عندئذ تنفتح مظلة تتحمل السرعات فوق الصوتية.[21] تتكون المظلة من مساحة قطرها 16 متراً ويمسكها 80 حبلاً طول كل منها 50 متراً. تستطيع المظلة تحمل الهبوط عند سرعات حتى 2.2 ماخ، وتكبح سرعة الهبوط بقوة قدرها 289 كيلو نيوتن في جو المريخ.[24] وتوجد على قاعدة المسبار كاميرا مثبتة تلتقط 5 صور كل ثانية، ودرجة تباين قدرها 1600×1200 بكسل تحت 3.7 كيلومتر خلال فترة تبلغ نحو دقيقتين حتى يلمس المسبار سطح المريخ.[25]
3. الهبوط الآلي: وهو يتبع مرحلة الهبوط بالمظلة على ارتفاع نحو 1.8 كيلومتر، حينئذ تكون سرعة هبوط المسبار قد هدأت إلى 100 متر/ثانية، ليفصل المسبار الغطاء.[21] تتكون آلة الهبوط من منصة مثبتة فوق المسبار وتعمل بثمانية محركات صاروخية تعمل بالهيدرازين لتهدئة السرعة. يبلغ دفع كل محرك نحو 3.1 كيلونيوتن وهي مماثل للمحركات التي استخدمت مع فايكينج.[26] ويبدأ المسبار النزول من منصة الهبوط التي يكون معلقا بها بثلاثة كابلات متينة بواسطة "رافعة سماوية".

4. الرافعة السماوية: تسمح الرافعة السماوية (بالإنجليزية: Sky Crane) بهبوط هادئ للمسبار حيث يكون المسبار معلق بالمنصة ذات المحركات الصاروخية.[21] تتكون الرابطة بين المسبار والمنصة السماوية من 3 كابلات تقوم في نفس الوقت بتوصيل إشارات كهربائية بين المنصة والمسبار أثناء الهبوط. وبعد ملامسة المسبار سطح المريخ يبقى موصولاً بالمنصة نحو ثانيتين حيث يتأكد برنامج إلكتروني من صلابة مكان النزول. عندئذ يُطلق المسبار عدة عبوات انفجارية تعمل على فصل الكابلات الموصلة بالمنصة، وتنطلق "المنصة السماوية" بعيداً عن المسبار وتتحطم على سطح المريخ. ويبدأ المسبار تجواله على سطح المريخ والقيام بمهامه العلمية. وهذه هي المرة الأولى التي تُستَخدم فيها "منصة سماوية" تساعد في عملية هبوط هادئ لمسبار على جرم سماوي.[27]
المهمة
.jpg.webp)
أهم أغراض البعثة هو التعرف على إمكانية وجود حياة في الماضي أو الحاضر على المريخ. وتنقسم القياسات العلمية التي سيقوم بها المسبار كوريوسيتي على هذا السبيل كالأتي:[28]
- اختبار وجود مركبات كربوهيدراتية أو مركبات عضوية واختبار تركيبها الكيميائي.
- اختبار كميات المواد الأساسية للحياة مثل الهيدروجين والنيتروجين والأكسجين والكربون والفسفور والكبريت.
- البحث عن مكونات ترجع إلى عوامل حيوية.
- فحص سطح المريخ للتعرف على معادنه، وتركيبها الكيميائي ونسب النظائر فيها.
- دراسة العوامل التي تكونت في ظلها التربة والصخور وتأثيرات العوامل المناخية عليها.
- اكتشاف التوزيع الحالي للماء وثاني أكسيد الكربون على الكوكب وأحوالهما.
- تحليل تطور الجو عبر فترة 4 مليارات سنة.
كما توجد عدة أغراض تهم الوجهة التقنية:[29]
- استعراض إمكانية التحرك مسافات كبيرة (5 - 20 كيلومتر) على سطح المريخ.
- الهبوط الدقيق في المنطقة المختارة في حدود دائرة قطرها 20 كيلومتر على المريخ.
- التأكد من إمكانية الهبوط على المريخ بمركبة تجولية كبيرة، وهي تماثل ظروف هبوط بعثة إلى المريخ تعود بعينات من تربته وصخوره.
المواصفات
المركبة الفضائية
وزن المركبة الفضائية عند إطلاقها هو 3893 كلغ، منها 899 كجم للروفر، و2401 للنظام الهبوط، و539 كجم (1190 £) لتزويد مرحلة العبور.
الروفر
يزن الروبوت نحو 900 كيلو جرام. مزود ببطارية من البلوتونيوم توفر طاقة تمكنه من العمل للنحو 14 عاماً. ويستعين في التحرك بست إطارات.[10]
- أجهزة الحاسوب: على متن الروفر زوجان متماثلان من أجهزة الحاسوب أطلق عليهما "عنصر الحاسوب" (RCE)، يحتوى على ذاكرة تصلت الإشعاع، التي تساعد على تحمل بيئة شديدة الإشعاع وتضمن عدم حدوث انقطاع التيار الكهربائي.[30] ذاكرة كل كمبيوتر تحتوي على 256 كيلوبايت من إيبروم، 256 ميجابايت من الديناميك رام، و2 جيجابايت من الذاكرة الوميضية[31]، هذا يقارن ب 3 ميغابايت من إيبروم و128 ميغابايت من ذاكرة ديناميك رام، و256 ميغابايت من ذاكرة فلاش المستخدمة في العربات السابقة في المريخ.[32]
- مصدر الطاقة: يستمد الروفر قوة محركه من بطارية النظائر المشعة (RTG)، التي أستخدمت في عربات الاستكشاف السابقة بشكل ناجح في فايكنج 1 وفايكنج 2 سنة 1976.[33][34]
- النظائر المشعة وأنظمة الطاقة (RPSs) هي المولدات التي تنتج الكهرباء من خلال الاضمحلال الطبيعي لل البلوتونيوم- 238، وهو من نظائر البلوتونيوم غير الانشطارية. يتم تحويل الحرارة المنبعثة من تحلل ألفا لهذا النظير إلى الكهرباء حيث تتوفر الطاقة باستمرار في جميع الفصول وخلال النهار والليل، ويمكن استخدام جزءا من الحرارة الناتجة في التدفئة داخل المسبار اللازمة للعمل السوي لأجهزة ومعدات الروفر.
- مولد الطاقة هو أحدث جيل من RTG التي قامت بتطويرها شركة بوينغ، وتسمى "المولدات الحرارية بالنظائر المشعة للبعثات متعددة المهام" وتعرف اختصارا MMRTG [35] اعتمادا على تكنولوجيا RTG الكلاسيكية، كونها أكثر مرونة وإدماجا، وتهدف إلى إنتاج 125 واط من الطاقة الكهربائية من نحو 2000 واط من الطاقة الحرارية في بداية المهمة.[33][34] وسينتج MMRTG طاقة أقل مع مرور الوقت حيث يضمحل وقود البلوتونيوم، لأن الحد الأدنى لعمره يقارب 14 عاما، حيث يصل إنتاج الطاقة الكهربائية إلى 100 واط.[36][37] وسيقوم مختبر علوم المريخ بتوليد 2.5 كيلووات في الساعة يوميا مقارنة مع الروبوتات السابقة التي تولد حوالي 0.6 كيلو واط في ساعة وفي اليوم الواحد.
- أجهزة الكمبيوتر RCE (بالإنجليزية: "Rover Compute Element") تستخدم المعالج [RAD750] وهو يخلف المعالج IBM RAD6000 الذي استخدم في مهمات سابقة.[38] إن المعالج RAD750 قادر على تنفيذ ما يقرب من 400 تعليمات كل ثانية (MIPS) بينما المعالج RAD6000 كان بإستطاعته تنفيذ ما يقرب من 35 MIPS .[39][40]
- الاتصالات : يحوي مختبر علوم المريخ اثنتين من وسائل الاتصال – تردد X-band وهي باقة اتصال فضائية تمكنه من التواصل المباشر مع الأرض، من خلال تردد فائق العلو إلكترا، وهو من برامج الراديو المعرفة مسبقا للتواصل مع بيئة المريخ المدارية. ومن المتوقع أن تكون السواتل المدارية للمريخ هي الوسيط الرئيسي في إرجاع البيانات إلى الأرض، لأنها تملك طاقة أكثر وأكبر من طاقة الاستشعار الهوائي لعربة الروفر (أنتينا).[41] في وقت الهبوط سيكون مطلوبا 13 دقيقة، و46 ثانية للإشارات كى تسافر بين الأرض والمريخ.[42]
- نظم التنقل: على غرار مارس ريكونيسانس أوربيتر ومارس باثفايندر فإن روفر مختبر علوم المريخ مجهز ب 6 عجلات بنظام التعليق (بالإنجليزية: rocker-bogie). ويعد نظام التعليق أيضا بمثابة جهاز هبوط العربة، على عكس سابقيه الصغيرين حجما. كما أن عجلات مختبر علوم المريخ هي أكر حجما من تلك التي استخدمت في عربات المريخ السابقة. كل عجلة لديها إليه تساعد على تثبيت نمط الجر وتترك بصماتها منقوشة في السطح الرملي للمريخ، الذي يساعد الكاميرات المثبتة على حساب المسافة المقطوعة، ويتم حسابها عبر طريقة إشارت مورس "لمختبر الدفع النفاث": (·--- ·--· ·-··).[43]
الأجهزة العلمية
كاميرا ماهلي
.jpg.webp)
الكاميرا ماهلي (بالإنجليزية: MahliCam) هي كاميرا صغيرة جداً مركبة على حامل الأدوات الموجود في طرف دراع الروبوت كوريوزيتي.[44] ستقوم هذه الكاميرا بتحليل التركيبة والبنية المجهرية للصخور، التربة والصقيع الممكن اكتشافه على سطح المريخ بمقياس الميكرومتر (متر على مليون) حتى السنتمتر. ستعطي صورا بألوان الطيف المرئية. رأس الكاميرا مجهز بأربع صمام ثنائي باعث للضوء ذات ضوء أبيض لإضاءة الهدف عندما يسود الظلام على سطح الكوكب الأحمر واثنين صمام ثنائي باعث للضوء دات أشعة فوق البنفسجية لإنتاج فلورية لاكتشاف المعادن الكربونية والمتبخرات.
ماست كاميرا

الكاميرا ماست (بالإنجليزية: MastCam) هي آلة تحملها سارية على المسبار، وهي كاميرا مركبة تحتوي على كاميرتين عاليتي التباين. وستقوم الكاميراتان بتصوير سطح المريخ وتوضيح تضاريسه، بالإضافة إلى قياس الطيف في الجو في نطاق الضوء المرئي والأشعة تحت الحمراء.[45] كما يمكن للكاميرتين تصوير الفيديو بسرعة 10 صور في الثانية.[45]
كاميرا الكيمياء
تتكون كاميرا الكيمياء وتُسمَّى "ChemCam" من جهاز ليزر قوي وجهاز تحليل الطيف وكاميرا خاصة. في إمكان مجموعة الأجهزة هذا التعرف على تربة المريخ وما عليه من زلك وأحجار حتى مسافة 7 أمتار بدقة وتحليلها.[46] يصوب الليزر على نقطة ويركز لتحليل مادة الحجر عن طريق تسخينها بشدة. بذلك تتبخر الطبقة العليا من الحجر وتحلل الفازات الصادرة عن طريق تحليل طيفها في نظاق الضوء المرئي. بذلك تعرف مكونات التربة والأحجار.[46]
مقياس الأحوال الجوية على المريخ

يقوم نظام قياس الأحوال الجوية على المريخ بجميع القياسات في هذا الخصوص. فهو يقوم بقياس سرعة الرياح اتجاهها وقياس الأشعة فوق البنفسجية ودرجة حرارة السطح، والضغط، ونسبة الرطوبة في جو المريخ.[47] وتوجد جميع المجسات ماعدا جهاز قياس الأشعة فوق البنفسجية على سارية المسبار، أما الأجهزة الإلكترونية فتوجد في صندوق في وسط المسبار. يزن مقياس الأحوال الجوية نحو 1.3 كيلوجرام وقد أعدته إسبانيا للمشروع.[47]
الكيمياء واكتشاف المعادن
يحتوي جهاز "CheMin-Instrument" على مطياف آخر يعمل على تحليل العينات المجمعة من التربة. ويتم ذلك بمساعدة مصدر أشعة سينية، يقوم بإشعاع العينة، ويقوم مجس يعمل بفكرة حيود الأشعة السينية وفلوريتها بالتحليل وتعيين التركيب الكيميائي للتربة، ويأمل العلماء عن طريق تحليل التربة اكتشاف آثار ماء وربما بعض الآثار لمادة حيوية.
يحتوي الجهاز على عجلة مزودة بـ27 بوتقة تُملأ بالعينات، ويمكن لجهاز القياس إدارة العجلة والانتقال من بوتقة إلى أخرى لتحليلها، بالإضافة إلى ذلك توجد 5 بوتقات أخوى تحتوي على مواد مرجعية تستخدم لمعايرة أجهزة القياس.[48] لتحليل العينة تضبط العينة أمام مصدر الأشعة السينية، الذي يركز شعاعاً قطره 50 ميكرومتر على العينة.[48]
وتقاس الأشعة التي مرت خلال العينة بواسطة مجس حساس يقيس الأشعة الفوق بنفسجية.[48] ويقوم بتحليل شدة الأشعة ومعامل انكسارها، ويقوم بتحضير طيفها الذي يعطي معلومات عن التركيب الكيميائي للعينة. يستطيع البالغ 40 × 40 ميكرومتر مربع تحضير 224 صورة في الثانية، وهو يبرد حتى درجة -60 مئوية بغرض الحصول على حساسية عالية.[48] وتستغرق عملية قياس كاملة عدة ساعات للحصول على نتائج جيدة دقيقة.[48]
جهاز تحليل العينات (SAM)

جهاز تحليل العينات (بالإنجليزية: SAM) هو أثقل جهاز على المسبار كوريوزيتي وأشدها دقة. يبلغ وزنه 38 كيلوغرام ويشكل نصف وزن جميع الأجهزة العلمية على المسبار.[49] وعن طريق ثلاثة أنظمة من المجسات يمكن التعرف على إذا ما كانت هناك على المريخ ظروف مناسبة للحياة في الماضي أو في الوقت الحاضر.[50] وهو يستطيع تحليل المركبات العضوية والعناصر الخفيفة وتعيين نسب النظائر في جو المريخ.[50] قام مركز جودارد للطيران الفضائي بإعداد الجهاز، الذي يستطيع العمل بقدرة 240 وات.[49]
يستطيع جهاز "SAM" تحليل عينات من التربة وعينات من جو المريخ.[51] ويستخدم نظم ذراع لجمع العينات من التربة، تحتوي على عدة مناخل، ويضع حصيلة المناخل في 74 علبة خاصة لحويها. وإذا كانت ثمة حاجة للتخلص من بعض المواد الطيارة يتم ذلك عن طريق التسخين في فرنين معدَّين لهذا الغرض، ويمكن لكل فرن منهما العمل بقدرة 40 وات وإنتاج حرارة حتى نحو 1,100 درجة مئوية. كما يمكن أن يقوما بحرق موادٍّ عضوية.[51] والغاز الناتج من تلك العملية أو الآتي من عينة من الجو يدخل مرحلة فصل كيميائي „(Chemical Separation and Processing Laboratory“ (CSPL).
وبعد تحضير العينات يوجه الغاز إلى ثلاثة أجهزة: يستخدم مطياف الغازات لفحص المواد العضوية،[51] الذي توجد عليه عدة غرف، كل منها مخصص للتعرف على مجموعة معينة من الغازات، وبذلك يمكن تعيين الغازات بدقة. ثم يستخدم مطيافاً يعمل بالليزر (بالإنجليزية: Tunable Laser Spectrometer)، وكذلك مطيافاً للكتلة يقوم بفصل الغازات وتعيين كتلة الجزيئات.[51]
في إمكان الأجهزة التعرف على العناصر والمركبات ابتداءً من الكتلة الذرية 2 إلى 535.[51] أما لقياس مركّبات كالماء والميثان وثاني أكسيد الكربون فيستخدم لذلك مطيافاً ليزرياً يتمتع بحساسية عالية لتلك المواد، كما يستطيع تعيين نسب النظائر في كل منها.[51]
مستكشف النيوترونات (DAN)
مستكشف النيوترونات (DAN) (بالإنجليزية: Dynamic of Albedo Neutrons) هو جهاز مستكشف إيجابي وسلبي للنوترونات حيث سيقوم بقياس نسبة الهيدروجين الموجود في الطبقة السطحية لسطح المريخ (على الأقل 1 متر من العمق) على طول المسار الذي ستسلكه العربة أثناء تنقلها على السطح. هذه المعطيات ستمكن من استنتاج نسبة تواجد الماء على شكله الطبيعي أو في المعادن الرطبة. تمت هندسته هذا الجهاز من طرف معهد أبحاث الفضاء التابع لأكاديمية العلوم الروسية[52]
جهاز (REMS)
جهاز (REMS) (بالإنجليزية: Rover Environmental Monitoring Station) هو محطة رصد جوي ستقوم بقياس الضغط الجوي، نسبة الرطوبة، الأشعة الفوق البنفسجية، سرعة الرياح ودرجة حرارة السطح والهواء. المجسات تم تثبيتها في عدة أماكن: مجموعتين من أجهزة القياس مُتبثة على سارية الكاميرا (Remote Sensing Mast RSM) على علو 1.5 متر من السطح، المجموعتين لهن اتجاهين مختلفين بينهما زاوية 120 درجة للحصول على حساب دقيق لاتجاه وسرعة الرياح المحلية. ستة (6) من صمام ثنائي باعث للضوء توجد في أعلى المركبة لحساب نسبة لأشعة الفوق البنفسجية على جميع أطوال الموجات. وأخيرا الجزء الرئيسي من جهاز (REMS) يوجد في وسط جسم المركبة ويتواصل مع الخارج بواسطة قناة تمكنه من حساب قيمة الضغط الجوي.
جهاز (REMS) تمت هندسته من طرف المركز الأستروبيولوجي الإسباني[53]
عداد الأشعة (RAD)


أعد عداد الأشعة بغرض قياس الأشعة الكونية على سطح المريخ. ويمكن قياس الأشعة في نطاق واسع منها وبدقة كبيرة، بحيث يمكن تعيين الجرعة الإشعاعية لإنسان على سطح المريخ، استعداداً لإرسال بعثات رواد فضاء إلى الكوكب مستقبلاً.[57] كما تلعب تلك القياسات دوراً هاماً للتعرف على إمكانية الحياة على المريخ، ويمكن عن طريق قياس شلالات الجسيمات الكونية على المريخ التعرف على تكوين غلافه الجويّ.[57]
قام معهد سوث وست للبحوث بالولايات المتحدة بالاشتراك مع المركز الألماني للطيران الجوي والفضائي ب جامعة كيل بألمانيا بتجهيز العداد.
مصور الهبوط على المريخ

مصور الهبوط هو كاميرا شديدة البيان تبدأ عملها خلال المرحلة الأخيرة للهبوط، ابتداءً من ارتفاع 4 كيلومترات، وتصور منطقة الهبوط، فيمكن بذلك اختيار منطقة الهبوط ومعرفة المناطق المجاورة بدقة.[58] هذا المصور مثبت في مقدمة غطاء المسبار إلى اليسار، وهو بذلك موجَّه للتصوير إلى الأسفل، ويمتلك مجس الصورة من نوع "باير" من 1600 × 1200 بكسل ويمكنه التعرف على سطح المريخ بدقة 2,500 سنتيمتر إلى 0.33 سنتيمتر بحسب الارتفاع. وهو مُعدٌّ لتسجيل 5 صور في كل ثانية.[58] يزن المصور 0.66 كيلوغرام ويحتاج طاقة كهربية بقدرة 10 وات.
ونظراً لعدم إمكانية إرسال نتائحه في الحال إلى الأرض بسبب ضيق عرض محزم إشارات الاتصال، فقد أنشئت عليه ذاكرة لتخزين البيانات بحجم 8 جيجابايت، يمكنها تخزين 4000 صورة.[58]
المميزات التقنية
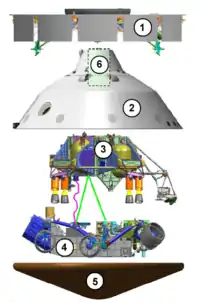
مختبر علوم المريخ مثله مثل المختبرات الأخرى السابقة التي تم إرسالها إلى المريخ، يتكون من أربع عناصر (طوابق) أساسية:
- طابق الرحلة الذي يضمن السفر من الأرض إلى المريخ
- عرية الدخول التي تحمي المركبة أثناء دخولها المجال الجوي للمريخ وتضمن مرحلة أولى من الفرملة.
- طابق الهبوط الذي يُتم آخر مرحلة للهبوط ويضع برفق المركبة على سطح المريخ
- الروبوت كوريوزيتي مجهز بأحدث التقنيات من أجل إنجاز مهمته على سطح المريخ.
انظر الصورة جانبه
| العنصر الأساسي | الرقم في الصورة | عنصر مكون للعنصر الأساسي | الكتلة (كغ) | ملاحظات |
|---|---|---|---|---|
| طابق الرحلة | 1 | - | 539 كغ[59] | 70 كغ للوقود |
| عربة الدخول وطابق الهبوط | 5 | الدرع الحرارية الأمامية | 382 كغ[60] | |
| 2 | الدرع الخلفية | 349 كغ[60] | ||
| 3 | طابق الهبوط | 1219 كغ[60] | 390 كغ للوقود | |
| - | المجموع | 2400 كغ | ||
| الروبوت كوريوزيتي | 4 | 899 كغ | ||
| المركبة الفضائية كوريوزيتي | الكتلة الإجمالية | حوالي 3893 كغ |
طابق الرحلة

طابق الرحلة هو بنية أسطوانية من الألومنيوم ذات قطر من 4 أمتار وارتفاع أقل، تزن 539 كيلوغرام، تغطي (مثل القبعة) باقي المركبة وتحمل من الجهة المقابلة لها المحول الذي يُثبت ويحمي المركبة وقاذفها. مهمة طابق الرحلة هي ضمان عبور المركبة الفضائية من المدار الأرضي إلى مدار المريخ في حالة جيدة غير مصابة بالشواهب. يـُتَخلى عن الطابق الواقي عند الاقتراب من كوكب المريخ عند أنتهاء مهمته وتبدأ عربة الدخول عملية الدخول المداري. تصميم طابق الرحلة لا يختلف عن أسلافه في مركبات مارس باثفايندر وMER. يُنجز، بمساعدة نظام دفعه 5 أو 6 تصحيحات ضرورية للمسار لكي تصل المركبة بالقرب من المريخ إلى المكان والسرعة الدقيقين الذين يمكناها من هبوط دقيق وهادئ.[61][62]
عربة الدخول
عبور الغلاف الجوي للمريخ في سرعة أولية تصل إلى 6 كم الثانية يؤدي إلى ارتفاع مهم في درجة حرارة الأجزاء الخارجية للمركبة قد تصل إلى 2100 درجة مئوية. لحماية المركبة خلال هذه المرحلة، يتم تغليفها وتغطيتها بعربة الدخول. هذه الأخيرة تتألف من الدرع الأمامي الواقي من الحرارة، مصمم لتحمل درجات الحرارة المرتفعة التي تعيشها المركبة في هذا المرحلة من الرحلة، والدرع الواقي الخلفي، الذي يحتوي على مظلة الهبوط. عربة الدخول هي على شكل مخروطي المجال بزاوية 70 درجة ونصف، هذا الشكل تم أخده من برنامج فايكينغ والذي استعمل في كل المركبات الفضائية اللواتي أرسلتهن وكالة ناسا إلى سطح المريخ في وقت لاحق.[59][63]
الدرع الواقي الأمامي

الدرع الأمامي الواقي من الحرارة هو هيكل قطره 4.5 متر، وهذا يعني أنه أكبر من درع الكبسولة أبولو (4 متر) وأيضا أكبر من نظيره المستخدم في المركبة MER. هناك علاقة مباشرة بين قطر الدرع، وفعالية الفرملة في الغلاف الجوي والكتلة التي يمكن وضعها على تربة المريخ بهدوء. القطر المختار هو الحد الأقصى المسموح به من قبل خصائص التصميم الهندسي لمنصة الإطلاق.[59]
الدرع الواقي الخلفي
الدرع الواقي الخلفي سيتعامل مع درجات حرارة أقل. هيكله، ذو بنية خلية النحل المصنوع من الألومينيوم سيواجه درجات حرارة شديدة التي تنتج عن المحرك الصاروخي أثناء مرحلة الدخول المداري، وقد صُنع من نفس المواد التي استُعملت في صناعة الدرع الواقي الأمامي للمركبات السابقة. الدرع الواقي الخلفي يحتوي على أربعة فتحات، عبر هذه الفتحات تَنفُث الفوهات الثمانية للمحركات الصاروخية بقوة دفع تصل إلى 308 نيوتن[64] الضرورية للتحكم في زاوية المواجهة وعموما في توجيه المركبة ككل وتصحيح المسار.
طابق الهبوط
طابق الهبوط سيتكلف بآخر جزء من مرحلة الهبوط ويضع بلطف الروبوت على سطح المريخ. تصميمه وهندسته مختلفان تماما عن سابقيه في المركبات السابقة التي هبطت على سطح المريخ.
- الروبوت MER والروبوت مارس باتفايندر استعملا أكياس الهواء في آخر جزء من مرحلة الهبوط، في مثل هذا النظام السرعات الأفقية والعمودية المتبقية أثناء التماس (لحظة الهبوط) مع سطح المريخ مهمة جداً (أكثر من 10 متر في الثانية)، في هذه الحالة هناك نظام معقد، (إذن أكثر وزناً)، سيقوم بفصل الروبوت عن طابق الهبوط بعد الهبوط.
- المركبتان فايكينغ وفينيكس تم وضعهما على سطح المريخ بواسطة محركات صاروخية. ومن أجل عدم حفر السطح أثناء النزول والحيلولة دون غرق المركبة في الغبار، يتم إيقاف المحركات قبل التماس مع السطح، والسرعة المتبقية أثناء الهبوط (عمودية 2.5 متر / ثانية وأفقية 1.5 متر / ثانية) يتم إلغائها بواسطة أرجل مزودة بكوابح الصدمات.
نظراً لكتلة الروبوت كوريوزيتي، لا يمكن استعمال تقنية أكياس الهواء، كما لا يمكن الرجوع إلى التقنية المستعملة في المركبتين فايكينغ وفينيكس لأنها تحتوي على مخاطر ممكن أن تؤدي إلى ضياع الروبوت خصوصا إذا كان الهبوط سيتم في منطقة صخرية بشكل عمودي مع وجود رياح قوية. الروبوت كوريوزيتي نزل بواسطة ثلاثة حبال طول كل واحد 7.5 متر تتدلى من طابق الهبوط الذي يبقى قار على مسافة من السطح مثل المروحية بواسطة محركاته، وبالتالي الروبوت ينزل بسرعة ضعيفة (0.75 متر / ثانية) على سطح المريخ.[65]
برنامج المهمة
| التاريخ | يوم الرحلة (يوم مريخي) | النشاط |
|---|---|---|
| 6 أغسطس 2012 5:24 غرينيتش | مريخ 0 | بدأ دخول المجال الجوي للمريخ. سرعة المركبة 5.9 كم/ثانية |
| 6 أغسطس 2012 5:34 غرينيتش | مريخ 0 | الهبوط في فوهة غيل بعد نزول دام 7 دقائق. بالنسبة للمركبة، الساعة الثالثة مساء بتوقيت المريخ. |
| 6 أغسطس 2012 | مريخ 0 | إرسال معلومات حول حالة المركبة. أول صور صغيرة أُخذت بواسطة الكاميرا Hazcam. |
| 7 أغسطس 2012 | مريخ 1 | استعمال الهوائي ذو كسب الكبير. جمع معلومات علمية حول حالة الطقس (جهاز REMS)، ونسبة الإشعاع (جهاز RAD)، والتقاط صور تكميلية، اختبار عمل مختلف الأجهزة والأنظمة، التحكم في الحرارة.[66] |
| 8 أغسطس 2012 | مريخ 3 إلى مريخ 7 | استعمال السارية، التقاط صور بواسطة Navcam |
| من 9 إلى 13 أغسطس 2012 | مريخ 3 إلى مريخ 7 | التحكم في مختلف الأنظمة الدقيقة، التقاط صور بانورامية بالألوان بواسطة Mastacm كاميرا[67] |
| 10 أغسطس 2012 | مريخ 3 | التقاط صور بالألوان بواسطة كاميرات مختلفة[68] |
| 11 أغسطس 2012 | مريخ 4 | التقاط صور بالألوان عالية الدقة[69] |
| 14 أغسطس 2012 | مريخ 9 | أول استعمال للدراع حامل الأدوات |
| 22 أغسطس 2012 | مريخ 14 | أول تحرك للمركبة بثلاثة أمتار ودورانها حول نفسها[70] |
| 22 سبتمبر 2012 | مريخ 28 | أول تماس بين درع الروبوت وصخرة على سطح المريخ[71] |
| 6 أغسطس 2013 | مرور سنة أرضية على تاريخ هبوط الروبوت على سطح المريخ. | |
| 7 يونيو 2014 | مريخ 969 | انتهاء المهمة في غضون سنة مريخية (687 يوم أرضي) |
المراجع
- NASA – Mars Science Laboratory, the Next Mars Rover نسخة محفوظة 09 ديسمبر 2017 على موقع واي باك مشين.
- Guy Webster، "Geometry Drives Selection Date for 2011 Mars Launch"، NASA/JPL-Caltech، مؤرشف من الأصل في 18 يناير 2012، اطلع عليه بتاريخ 22 سبتمبر 2011.
- Allard Beutel (19 نوفمبر 2011)، "NASA's Mars Science Laboratory Launch Rescheduled for Nov. 26"، ناسا، مؤرشف من الأصل في 5 مارس 2017، اطلع عليه بتاريخ 21 نوفمبر 2011.
- Martin, Paul K.، "NASA'S MANAGEMENT OF THE MARS SCIENCE LABORATORY PROJECT (IG-11-019)" (PDF)، NASA OFFICE OF INSPECTOR GENERAL، مؤرشف من الأصل (PDF) في 21 مايو 2018.
- Rover Fast Facts نسخة محفوظة 16 مارس 2017 على موقع واي باك مشين.
- البريطانية نسخة محفوظة 20 مايو 2015 على موقع واي باك مشين.
- "Name NASA's Next Mars Rover"، NASA/JPL، 27 مايو 2009، مؤرشف من الأصل في 18 سبتمبر 2012، اطلع عليه بتاريخ 27 مايو 2009.
- "NASA Selects Student's Entry as New Mars Rover Name"، NASA/JPL، 27 مايو 2009، مؤرشف من الأصل في 30 أبريل 2019، اطلع عليه بتاريخ 27 مايو 2009.
- انطلاق الروبوت "كوريوزيتي" السبت إلى المريخ فرنس24، تاريخ الولوج 26-11-2011 [وصلة مكسورة] نسخة محفوظة 14 أبريل 2020 على موقع واي باك مشين.
- ناسا ترسل مسبارا متطورا إلى المريخ بي بي سي عربية، تاريخ 26-11-2011 نسخة محفوظة 30 سبتمبر 2013 على موقع واي باك مشين.
- Stathopoulos, Vic (أكتوبر 2011)، "Mars Science Laboratory"، Aerospace Guide، مؤرشف من الأصل في 26 يناير 2019، اطلع عليه بتاريخ 4 فبراير 2012.
- MSL Technical and Replan Status. Richard Cook. (January 9, 2009) نسخة محفوظة 09 أغسطس 2012 على موقع واي باك مشين.
- Mars Science Laboratory: Still Alive, For Now. October 10, 2008. Universe Today. نسخة محفوظة 03 ديسمبر 2008 على موقع واي باك مشين.
- "Next NASA Mars Mission Rescheduled For 2011"، NASA/JPL، 4 ديسمبر 2008، مؤرشف من الأصل في 24 يناير 2019، اطلع عليه بتاريخ 4 ديسمبر 2008.
- "Mars Science Laboratory: the budgetary reasons behind its delay"، The Space Review، 2 مارس 2009، مؤرشف من الأصل في 30 نوفمبر 2018، اطلع عليه بتاريخ 26 يناير 2010.
- "Name NASA's Next Mars Rover"، NASA/JPL، 27 مايو 2009، مؤرشف من الأصل في 18 سبتمبر 2012، اطلع عليه بتاريخ 27 مايو 2009.
- "NASA Selects Student's Entry as New Mars Rover Name"، NASA/JPL، 27 مايو 2009، مؤرشف من الأصل في 30 أبريل 2019، اطلع عليه بتاريخ 27 مايو 2009.
- The winning essay نسخة محفوظة 22 مايو 2017 على موقع واي باك مشين.
- هبوط ناجح لكيوريوستي على المريخ الجزيرة.نت تاريخ الولوج 6 أغسطس 2012، نسخة محفوظة 22 ديسمبر 2013 على موقع واي باك مشين. [وصلة مكسورة]
- NASA's Next Mars Rover to Land at Gale Crater. JPL. Retrieved on 2011-07-22. نسخة محفوظة 22 أكتوبر 2011 على موقع واي باك مشين.
- "Final Minutes of Curiosity's Arrival at Mars"، NASA/JPL، مؤرشف من الأصل في 22 مايو 2017، اطلع عليه بتاريخ 08 أبريل 2011.
- "Mission Timeline: Entry, Descent, and Landing"، NASA and JPL، مؤرشف من الأصل في 19 يونيو 2008، اطلع عليه بتاريخ 07 أكتوبر 2008.
- "Mars Science Laboratory Entry, Descent, and Landing Triggers"، IEEE، مؤرشف من الأصل في 13 ديسمبر 2019، اطلع عليه بتاريخ 21 أكتوبر 2008.
- "Mars Science Laboratory Parachute Qualification Testing"، NASA/JPL، مؤرشف من الأصل في 20 أغسطس 2016، اطلع عليه بتاريخ 15 أبريل 2009.
- "Mars Descent Imager (MARDI)"، NASA/JPL، مؤرشف من الأصل في 9 مايو 2019، اطلع عليه بتاريخ 02 ديسمبر 2009.
- "Aerojet Ships Propulsion for Mars Science Laboratory"، Aerojet، مؤرشف من الأصل في 9 مايو 2013، اطلع عليه بتاريخ 18 ديسمبر 2010.
- Sky crane concept video على يوتيوب
- Mars Science Laboratory: Objectives. JPL. Retrieved on 2011-08-01.
- Mars Science Laboratory: Overview. JPL. Retrieved on 2011-08-01.
- "Mars Science Laboratory Mission Page – Rover "Brains""، Jet Propulsion Laboratory، مؤرشف من الأصل في 26 فبراير 2017.
- "Mars Science Laboratory: Mission: Rover: Brains"، NASA/JPL، مؤرشف من الأصل في 26 فبراير 2017، اطلع عليه بتاريخ 27 مارس 2009.
- Bajracharya, Max (2008)، "Autonomy for Mars rovers: past, present, and future"، Computer، 41 (12): 45، doi:10.1109/MC.2008.9، ISSN 0018-9162.
{{استشهاد بدورية محكمة}}: الوسيط غير المعروف|شهر=تم تجاهله (مساعدة) - "Multi-Mission Radioisotope Thermoelectric Generator" (PDF)، NASA/JPL، 1 يناير 2008، مؤرشف من الأصل (PDF) في 7 نوفمبر 2012، اطلع عليه بتاريخ 07 سبتمبر 2009.
- "Mars Exploration: Radioisotope Power and Heating for Mars Surface Exploration" (PDF)، NASA/JPL، 18 أبريل 2006، مؤرشف من الأصل (PDF) في 24 يونيو 2017، اطلع عليه بتاريخ 07 سبتمبر 2009.
- "Technologies of Broad Benefit: Power"، مؤرشف من الأصل في 14 يونيو 2008، اطلع عليه بتاريخ 20 سبتمبر 2008.
- "Mars Science Laboratory – Technologies of Broad Benefit: Power"، NASA/JPL، مؤرشف من الأصل في 21 مارس 2019، اطلع عليه بتاريخ 23 أبريل 2011.
- Ajay K. Misra (26 يونيو 2006)، "Overview of NASA Program on Development of Radioisotope Power Systems with High Specific Power" (PDF)، NASA/JPL، مؤرشف من الأصل (PDF) في 9 أغسطس 2012، اطلع عليه بتاريخ 12 مايو 2009.
- "BAE Systems Computers to Manage Data Processing and Command For Upcoming Satellite Missions" (Press release)، BAE Systems، 17 يونيو 2008، مؤرشف من الأصل في 16 نوفمبر 2018، اطلع عليه بتاريخ 17 نوفمبر 2008.
- "RAD750 radiation-hardened PowerPC microprocessor" (PDF)، BAE Systems، 1 يوليو 2008، مؤرشف من الأصل (PDF) في 19 أغسطس 2016، اطلع عليه بتاريخ 07 سبتمبر 2009.
- "RAD6000 Space Computers" (PDF)، BAE Systems، 23 يونيو 2008، مؤرشف من الأصل (PDF) في 13 يونيو 2018، اطلع عليه بتاريخ 07 سبتمبر 2009.
- Andre Makovsky, Peter Ilott, Jim Taylor (2009)، "Mars Science Laboratory Telecommunications System Design" (PDF)، JPL، مؤرشف من الأصل (PDF) في 29 أغسطس 2017.
{{استشهاد ويب}}: صيانة CS1: أسماء متعددة: قائمة المؤلفون (link) - Mars Earth distance in light minutes, Wolfram Alpha نسخة محفوظة 13 سبتمبر 2017 على موقع واي باك مشين.
- "New Mars Rover to Feature Morse Code"، National Association for Amateur Radio، مؤرشف من الأصل في 28 مارس 2019.
- الكاميرا ماهلي، وثيقة pdf نسخة محفوظة 19 يونيو 2016 على موقع واي باك مشين.
- MSL Science Corner: Mast Camera (MastCam). JPL. Retrieved on 2011-04-22. نسخة محفوظة 8 أغسطس 2012 على موقع واي باك مشين.
- MSL Science Corner: Chemistry & Camera (ChemCam). JPL. Retrieved on 2011-04-22. نسخة محفوظة 20 يوليو 2011 على موقع واي باك مشين.
- Rover Environmental Monitoring Station for MSL mission. In: 4th International workshop on the Mars Atmosphere: modelling and observations. Universität Pierre und Marie Curie, Februar 2011. Retrieved on 2011-06-11.
- "MSL Chemistry & Mineralogy X-ray diffraction(CheMin)"، NASA/JPL، مؤرشف من الأصل في 24 فبراير 2019، اطلع عليه بتاريخ 25 نوفمبر 2011.
- SPRL's current projects – Sample Analysis at Mars. SPRL. Retrieved on 2011-06-04.
- MSL Science Corner: Sample Analysis at Mars (SAM). JPL. Retrieved on 2011-06-04. نسخة محفوظة 20 يوليو 2011 على موقع واي باك مشين.
- Paul Mahaffy: The Sample Analysis at Mars Suite and it's Methane Relevant Investigations. NASA Goddard Space Flight Center, November 2009. Retrieved on 2011-06-04. (PDF, Englisch)
- Dynamic Albedo of Neutrons (DAN) نسخة محفوظة 19 فبراير 2017 على موقع واي باك مشين.
- Rover Environmental Monitoring Station (REMS) نسخة محفوظة 20 يناير 2017 على موقع واي باك مشين.
- Kerr, Richard (31 مايو 2013)، "Radiation Will Make Astronauts' Trip to Mars Even Riskier"، ساينس، 340 (6136): 1031، Bibcode:2013Sci...340.1031K، doi:10.1126/science.340.6136.1031، PMID 23723213.
- Zeitlin, C. وآخرون (31 مايو 2013)، "Measurements of Energetic Particle Radiation in Transit to Mars on the Mars Science Laboratory"، ساينس، 340 (6136): 1080–1084، Bibcode:2013Sci...340.1080Z، doi:10.1126/science.1235989، PMID 23723233، مؤرشف من الأصل في 12 فبراير 2020.
{{استشهاد بدورية محكمة}}: صيانة CS1: يستخدم وسيط المؤلفون (link) - Chang, Kenneth (30 مايو 2013)، "Data Point to Radiation Risk for Travelers to Mars"، The New York Times، مؤرشف من الأصل في 27 سبتمبر 2019، اطلع عليه بتاريخ 31 مايو 2013.
- MSL Science Corner: Radiation Assessment Detector (RAD). JPL. Retrieved on 2011-06-05. نسخة محفوظة 14 سبتمبر 2011 على موقع واي باك مشين.
- MSL Science Corner: Mars Descent Imager (MARDI). JPL. Retrieved on 2011-06-09. نسخة محفوظة 7 أغسطس 2012 على موقع واي باك مشين.
- NASA, Mars Science Laboratory launch press kit, novembre 2011
- Spacecraft Facts نسخة محفوظة 15 فبراير 2017 على موقع واي باك مشين.
- Cruise Configuration نسخة محفوظة 20 أغسطس 2016 على موقع واي باك مشين.
- How Will MSL Navigate to Mars? Very Precisely Read more: http://www.universetoday.com/91254/how-will-msl-navigate-to-mars-very-precisely/#ixzz22wHJSCEe نسخة محفوظة 16 مايو 2017 على موقع واي باك مشين.
- R. Braun et R Manning, Mars Exploration Entry, Descent and Landing Challenges, 2009 نسخة محفوظة 28 يناير 2020 على موقع واي باك مشين.
- Aerojet Ships Propulsion System For Mars Science Laboratory Mission نسخة محفوظة 03 مارس 2016 على موقع واي باك مشين.
- Mars Science Laboratory Entry, Descent, and Landing System Overview [وصلة مكسورة] نسخة محفوظة 9 نوفمبر 2016 على موقع واي باك مشين.
- Curiosity's Daily Update: Curiosity Safely on Mars! Health Checks Begin نسخة محفوظة 16 سبتمبر 2016 على موقع واي باك مشين. [وصلة مكسورة]
- Curiosity's First Low-Resolution Color Panorama - August 10, 2012 نسخة محفوظة 08 يونيو 2016 على موقع واي باك مشين.
- This image was taken by Mastcam: Left (MAST_LEFT) onboard NASA's Mars rover Curiosity on Sol 3 نسخة محفوظة 09 مارس 2016 على موقع واي باك مشين.
- Curiosity Sends High-Resolution Color Images from Gale Crater نسخة محفوظة 21 أكتوبر 2016 على موقع واي باك مشين. [وصلة مكسورة]
- المسبار كيوريوسيتي يتأهب للقيام بأولى جولاته على سطح المريخ نسخة محفوظة 25 أكتوبر 2012 على موقع واي باك مشين.
- Curiosity Finishes Close Inspection of Rock Target نسخة محفوظة 03 يونيو 2015 على موقع واي باك مشين. [وصلة مكسورة]
وصلات خارجية
| مواضيع عامة |
|  |
|---|---|---|
| الأرض والسهول والهضاب |
| |
| البراكين |
| |
| الفوهات | ||
| الأخاديد والوديان |
| |
| أشكال أخرى |
| |
| الزمن الجيولوجي |
| |
| الاستكشاف |
| |
| عواصف رملية |
| |
| الأقمار | ||
| كويكبات | ||
المسابر الفضائية المرسلة إلى المريخ | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| مهمات حالية |
|   | |||||||
| مهمات سابقة |
| ||||||||
| مهمات مخطط لها |
| ||||||||
| مهمات مقترحة |
| ||||||||
| مهمات ملغية |
| ||||||||
| مقترحات مشاريع أٌلغيت لاحقاً |
| ||||||||
* فشل في الإطلاق | |||||||||
| تخصصات | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| مواضيع |
| ||||||||||
| مهام فضائية |
| ||||||||||
| ذات صلة |
| ||||||||||
| |||||||||||
| السياسة والتاريخ |
| ||||||
|---|---|---|---|---|---|---|---|
| البرامج الآلية |
| ||||||
| برامج رحلات الفضاء البشرية |
| ||||||
| مهام فردية مهام (بشرية وروبوتية) |
| ||||||
| الاتصالات والملاحة |
| ||||||
| قوائم ناسا |
| ||||||
| صور ناسا والأعمال الفنية |
| ||||||
| |||||||
 بوابة الولايات المتحدة
بوابة الولايات المتحدة بوابة استكشاف
بوابة استكشاف بوابة الفضاء
بوابة الفضاء بوابة المجموعة الشمسية
بوابة المجموعة الشمسية بوابة المريخ
بوابة المريخ بوابة رحلات فضائية
بوابة رحلات فضائية بوابة روبوتيات
بوابة روبوتيات بوابة عقد 2010
بوابة عقد 2010 بوابة علم الأحياء
بوابة علم الأحياء بوابة علم الأحياء الفلكي
بوابة علم الأحياء الفلكي بوابة علم الفلك
بوابة علم الفلك