Aceleración
En física, la aceleración es una magnitud derivada vectorial que nos indica la variación de velocidad por unidad de tiempo. En el contexto de la mecánica vectorial newtoniana se representa normalmente por o y su módulo por . Las aceleraciones son cantidades vectoriales (en el sentido de que tienen magnitud y dirección).[1][2]



La magnitud de la aceleración de un objeto, como la describe la Segunda Ley de Newton,[3] es el efecto combinado de dos causas:
- el balance neto de todas las fuerzas externas que actúan sobre ese objeto - la magnitud es directamente proporcional a esta fuerza neta resultante;
- la masa de ese objeto , dependiendo de los materiales de los que está hecho, la magnitud es inversamente proporcional a la masa del objeto.
Sus dimensiones son . Su unidad en el Sistema Internacional es m/s².
![{\displaystyle \scriptstyle [L]\cdot [T^{-2}]}](../I/383ed5e1c01bbd79d73d86c5c465d1675f2a6964.svg)
Por ejemplo, cuando un vehículo arranca estando detenido (velocidad cero, en un marco de referencia inercial) y viaja en línea recta a velocidades crecientes, está acelerando en la dirección de la marcha. Si el vehículo gira, se produce una aceleración hacia la nueva dirección y cambia su vector de movimiento. La aceleración del vehículo en su dirección actual de movimiento se llama aceleración lineal (o tangencial durante los movimientos circulares), la reacción que experimentan los pasajeros a bordo como una fuerza que los empuja hacia atrás en sus asientos. Al cambiar de dirección, la aceleración que efectúa se llama aceleración radial (ortogonal durante los movimientos circulares), la reacción que experimentan los pasajeros como una fuerza centrífuga. Si la velocidad del vehículo disminuye, esto es una aceleración en la dirección opuesta y matemáticamente negativa, a veces llamada desaceleración, y los pasajeros experimentan la reacción a la desaceleración como una fuerza inercial que los empuja hacia adelante. Estas aceleraciones negativas a menudo se logran mediante la combustión de retrocohetes en naves espaciales.[4] Tanto la aceleración como la desaceleración se tratan de la misma manera, ambos son cambios de velocidad. Los pasajeros sienten cada una de estas aceleraciones (tangencial, radial, desaceleración) hasta que su velocidad relativa (diferencial) se neutraliza con respecto al vehículo.
Aceleración en mecánica newtoniana
Según la mecánica newtoniana, una partícula no puede seguir una trayectoria curva a menos que sobre ella actúe una cierta aceleración como consecuencia de la acción de una fuerza, ya que si esta no existiese, su movimiento sería rectilíneo. Asimismo, una partícula en movimiento rectilíneo solo puede cambiar su velocidad bajo la acción de una aceleración en la misma dirección de su velocidad (dirigida en el mismo sentido si acelera; o en sentido contrario si desacelera).

En la mecánica newtoniana, para un cuerpo con masa constante, la aceleración del cuerpo medida por un observador inercial es proporcional a la fuerza que actúa sobre el mismo (segunda ley de Newton):

donde F es la fuerza resultante que actúa sobre el cuerpo, m es la masa del cuerpo, y a es la aceleración. La relación anterior es válida en cualquier sistema de referencia inercial.
Algunos ejemplos del concepto de aceleración son:
- La llamada aceleración de la gravedad en la Tierra es la aceleración que produce la fuerza gravitatoria terrestre; su valor en la superficie de la Tierra es, aproximadamente, de 9,8 m/s². Esto quiere decir que si se dejara caer libremente un objeto, aumentaría su velocidad de caída a razón de 9,8 m/s por cada segundo (siempre que omitamos la resistencia aerodinámica del aire). El objeto caería, por tanto, cada vez más rápido, respondiendo dicha velocidad a la ecuación:

- Una maniobra de frenada de un vehículo, que se correspondería con una aceleración de signo negativo, o desaceleración, al oponerse a la velocidad que ya tenía el vehículo. Si el vehículo adquiriese más velocidad, a dicho efecto se le llamaría aceleración y, en este caso, sería de signo positivo.
Enfoque intuitivo
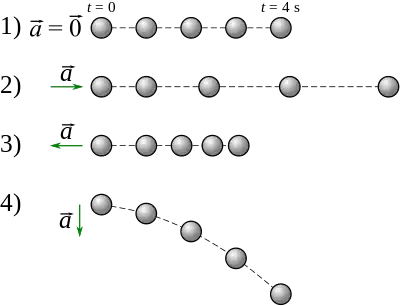
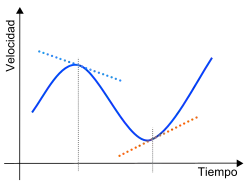
1) El movimiento no sufre aceleración.
2) La velocidad aumenta constantemente.
3) La velocidad disminuye constantemente.
4) La aceleración describe una curvatura de la trayectoria.
Así como la velocidad describe la modificación de la posición de un objeto en el tiempo, la aceleración describe la «modificación de la velocidad en el tiempo» (que las matemáticas formalizan con la noción de derivada ). En la vida cotidiana, hay tres casos que el físico agrupa bajo el concepto único de aceleración:
- ir más rápido (acelerar en el sentido común más restrictivo): en un automóvil, el velocímetro muestra que la velocidad está aumentando;
desde un punto de vista matemático, la aceleración es positiva, es decir que el vector de aceleración tiene una componente en la dirección de la velocidad;
- ir más lento (frenar, desacelerar o disminuir la velocidad en el lenguaje común): la indicación del velocímetro disminuye;
la aceleración es negativa, o el vector de aceleración tiene una componente opuesta a la dirección de la velocidad;
- cambio de dirección (girar o virar en el lenguaje común): incluso si la indicación del velocímetro no cambia, el cambio de dirección implica aceleración;
el vector de aceleración tiene una componente perpendicular a la velocidad; aquí nos interesa la variación de la dirección del vector velocidad, no la variación de su norma.
Cuando una persona está sometida a una aceleración, se siente un esfuerzo: fuerza que presiona contra el asiento cuando el coche acelera (va más rápido), fuerza que empuja hacia el parabrisas cuando el coche frena, fuerza que empuja a un lado cuando el coche frena o está girando (fuerza centrífuga). Se siente esta tensión de manera similar al peso. La relación entre aceleración y esfuerzo es el dominio de la dinámica ; pero la aceleración es una noción de cinemática, es decir que se define solo a partir del movimiento, sin involucrar las fuerzas.
Aceleración en cinemática puntual
El vector de aceleración de un punto material en cualquier momento se encuentra mediante una diferenciación temporal única del vector velocidad de un punto material (o diferenciación doble del vector radio )

Si se conocen las coordenadas del punto en la trayectoria y el vector de velocidad en cualquier momento del tiempo t0,así como la dependencia de la aceleración en el tiempo al integrar esta ecuación, se pueden obtener las coordenadas y la velocidad del punto en cualquier momento del tiempo t (tanto antes como después del momento t0)





La derivada temporal de la aceleración, es decir, el valor que caracteriza la tasa de cambio en la aceleración, se llama sobreaceleración o jerk:
donde


es el vector de la sobreaceleración.
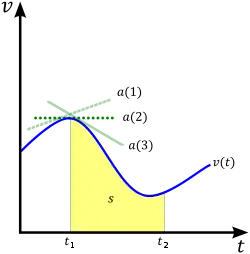
Aceleración media e instantánea
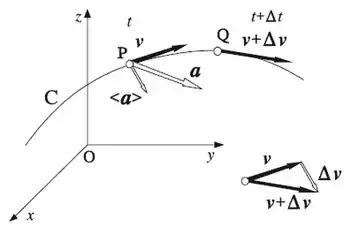
Para cada instante o punto de la trayectoria, queda definido un vector velocidad que, en general, cambia tanto en módulo como en dirección al pasar de un punto a otro de la trayectoria. La dirección de la velocidad cambiará debido a que la velocidad es tangente a la trayectoria y esta, por lo general, no es rectilínea. En la Figura se representan los vectores velocidad correspondientes a los instantes t y t+Δt, cuando la partícula pasa por los puntos P y Q, respectivamente. El cambio vectorial en la velocidad de la partícula durante ese intervalo de tiempo está indicado por Δv, en el triángulo vectorial al pie de la figura. Se define la aceleración media de la partícula, en el intervalo de tiempo Δt, como el cociente:

Que es un vector paralelo a Δv y dependerá de la duración del intervalo de tiempo Δt considerado. La aceleración instantánea se la define como el límite al que tiende el cociente incremental Δv/Δt cuando Δt→0; esto es la derivada del vector velocidad con respecto al tiempo:

Puesto que la velocidad instantánea v a su vez es la derivada del vector posición r respecto al tiempo, la aceleración es la derivada segunda de la posición con respecto del tiempo:

De igual forma se puede definir la velocidad instantánea a partir de la aceleración como:

Se puede obtener la velocidad a partir de la aceleración mediante integración:

Medición de la aceleración
La medida de la aceleración puede hacerse con un sistema de adquisición de datos y un simple acelerómetro. Los acelerómetros electrónicos son fabricados para medir la aceleración en una, dos o tres direcciones. Cuentan con dos elementos conductivos, separados por un material que varía su conductividad en función de las medidas, que a su vez serán relativas a la aceleración del conjunto.
Unidades
Las unidades de la aceleración son:
- 1 m/s²
- 1 cm/s² = 1 Gal
| м/s² | pie/s² | g | см/s² | |
|---|---|---|---|---|
| 1 м/s² = | 1 | 3,28084 | 0,101972 | 100 |
| 1 Pie/s² = | 0,304800 | 1 | 0,0310810 | 30,4800 |
| g = | 9,80665 | 32,1740 | 1 | 980,665 |
| 1 см/s² = | 0,01 | 0,0328084 | 0,00101972 | 1 |
Valores de aceleración en algunos casos
Valores de las aceleraciones de varios movimientos:[5]
| Tipo de movimiento | Aceleración, m/s² |
| Aceleración centrípeta del sistema solar orbitando la galaxia | 2,2×10-10 |
| 0,0060 | |
| Aceleración centrípeta de la Luna que orbita alrededor de la Tierra | 0,0027 |
| Ascensor de pasajeros | 0,9-1,6 |
| Tren metro | 1 |
| Coche Zhiguli | 1,5 |
| Corredor de corta distancia | 1,5 |
| Ciclista | 1.7 |
| Patinador sobre hielo | - 1.9 |
| Motocicleta | 3-6 |
| Frenado de emergencia del coche | 4-6 |
| Usain Bolt, aceleración máxima | 8.[6] |
| Automóvil de carreras | 8-9 |
| Frenado al abrir el paracaídas | 30 (3 g) |
| Lanzamiento y desaceleración de Nave espacial | 40-60 (4-6 g) |
| Maniobra de avión de reacción | hasta 100 (hasta 10 g) |
| Pilote después del impacto de un hincador | 300 (30 g) |
| Pistón motor de combustión interna | 3×10³ |
| Bala en el cañón de un rifle | 2,5×105 |
| Micropartículas en acelerador | (2-50)×1014 |
| Electrón entre el cátodo y el ánodo en el tubo de rayos catódicos de una televisión en color con (20 kV, 0,5 m) | ≈7×1015 |
| Electrones al impactar con fósforo en el tubo de un televisor en color (20 kV) | ≈1022 |
| Partícula alfa en el núcleo atómico | ≈1027 |
Nota: aquí g ≈ 10 m/s².
Componentes intrínsecas de la aceleración: aceleraciones tangencial y normal
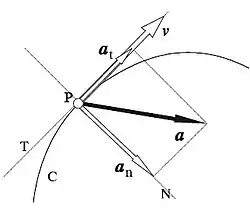
En tanto que el vector velocidad v es tangente a la trayectoria, el vector aceleración a puede descomponerse en dos componentes (llamadas componentes intrínsecas) mutuamente perpendiculares: una componente tangencial at (en la dirección de la tangente a la trayectoria), llamada aceleración tangencial, y una componente normal an (en la dirección de la normal principal a la trayectoria), llamada aceleración normal o centrípeta (este último nombre en razón a que siempre está dirigida hacia el centro de curvatura).
Derivando la velocidad con respecto al tiempo, teniendo en cuenta que el vector tangente cambia de dirección al pasar de un punto a otro de la trayectoria (esto significa que no es constante) obtenemos

siendo el vector unitario tangente a la trayectoria en la misma dirección que la velocidad y la velocidad angular. Resulta conveniente escribir la expresión anterior en la forma



siendo
- el vector unitario normal a la trayectoria, esto es dirigido hacia el centro de curvatura de la misma,
- el radio de curvatura de la trayectoria, esto es el radio de la circunferencia osculatriz a la trayectoria.


Las magnitudes de estas dos componentes de la aceleración son:

Cada una de estas dos componentes de la aceleración tiene un significado físico bien definido. Cuando una partícula se mueve, su velocidad puede cambiar y este cambio lo mide la aceleración tangencial. Pero si la trayectoria es curva también cambia la dirección de la velocidad y este cambio lo mide la aceleración normal.
- Si en el movimiento curvilíneo la velocidad es constante (v=cte), la aceleración tangencial será nula, pero habrá una cierta aceleración normal, de modo que en un movimiento curvilíneo siempre habrá aceleración.
- Si el movimiento es circular, entonces el radio de curvatura es el radio R de la circunferencia y la aceleración normal se escribe como an = v²/R.
- Si la trayectoria es rectilínea, entonces el radio de curvatura es infinito (ρ→∞) de modo que an=0 (no hay cambio en la dirección de la velocidad) y la aceleración tangencial at será nula o no según que la velocidad sea o no constante.
Los vectores que aparecen en las expresiones anteriores son los vectores del triedro de Frênet que aparece en la geometría diferencial de curvas del siguiente modo:
- es el vector unitario tangente a la curva.
- es el vector unitario normal a la curva.
- es el vector velocidad angular que es paralelo al vector binormal a la curva.
Movimiento circular uniforme
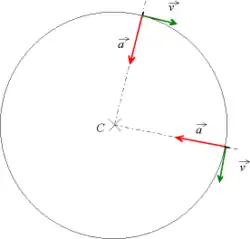
Un movimiento circular uniforme es aquel en el que la partícula recorre una trayectoria circular de radio R con rapidez constante, es decir, que la distancia recorrida en cada intervalo de tiempo igual es la misma. Para ese tipo de movimiento el vector de velocidad mantiene su módulo y va variando la dirección siguiendo una trayectoria circular. Si se aplican las fórmulas anteriores, se tiene que la aceleración tangencial es nula y la aceleración normal es constante: a esta aceleración normal se la llama «aceleración centrípeta». En este tipo de movimiento la aceleración aplicada al objeto se encarga de modificar la trayectoria del objeto y no en modificar su velocidad.

Movimiento rectilíneo acelerado
Si se aplican las fórmulas anteriores al movimiento rectilíneo, en el que solo existe aceleración tangencial, al estar todos los vectores contenidos en la trayectoria, podemos prescindir de la notación vectorial y escribir simplemente:

Ya que en ese tipo de movimiento los vectores y son paralelos, satisfaciendo también la relación:



La coordenadas de posición viene dada en este caso por:

Un caso particular de movimiento rectilíneo acelerado es el movimiento rectilíneo uniformemente acelerado donde la aceleración es además constante y por tanto la velocidad y la coordenadas de posición vienen dados por:

Aceleración en mecánica relativista
Relatividad especial
El análogo de la aceleración en mecánica relativista se llama cuadriaceleración y es un cuadrivector cuyas tres componentes espaciales para pequeñas velocidades coinciden con las de la aceleración newtoniana (la componente temporal para pequeñas velocidades resulta proporcional a la potencia de la fuerza dividida por la velocidad de la luz y la masa de la partícula).
En mecánica relativista la cuadrivelocidad y la cuadriaceleración son siempre ortogonales, eso se sigue de que la cuadrivelocidad tiene un (pseudo)módulo constante:

Donde c es la velocidad de la luz y el producto anterior es el producto asociado a la métrica de Minkowski:

Relatividad general
En teoría general de la relatividad el caso de la aceleración es más complicado, ya que debido a que el propio espacio-tiempo es curvo (ver curvatura del espacio-tiempo), una partícula sobre la que no actúa ninguna fuerza puede seguir una trayectoria curva, de hecho la línea curva que sigue una partícula sobre la que no actúa ninguna fuerza exterior es una línea geodésica, de hecho en relatividad general la fuerza gravitatoria no se interpreta como una fuerza sino como un efecto de la curvatura del espacio-tiempo que hace que las partículas no trayectorias rectas sino líneas geodéscias. En este contexto la aceleración no geodésica de una partícula es un vector cuyas cuatro componentes se calulan como:

Aquí (componente temporal y tres componentes espaciales). Se aprecia que cuando los símbolos de Christoffel una partícula puede tener aceleración cero aunque su cuadrivelocidad no sea constante, eso sucede cuando la partícula sigue una línea geodésica de un espacio-tiempo de curvatura no nula.


Importancia de la aceleración en Ingeniería Mecánica
La ingeniería mecánica es el diseño y fabricación de máquinas , es decir, sistemas que realizan movimientos. Una parte importante es el dimensionamiento, es decir la elección de actuadores ( gatos , motores ) y piezas que soportan las fuerzas. Si las masas puestas en movimiento y / o las aceleraciones son grandes, los efectos dinámicos - las fuerzas necesarias para crear las aceleraciones, o las fuerzas resultantes de las aceleraciones - no son despreciables. Por tanto, determinar la aceleración instantánea durante un movimiento es fundamental para que las piezas resistan y para determinar el consumo energético del sistema.
El ballet de robots alrededor de la carrocería de un automóvil que se ensambla es impresionante. Una fábrica de automóviles consume tanto como una ciudad promedio, y los robots son un gran contribuyente. Es por eso que Siemens y Volkswagen han abordado el problema, enfocándose en las causas del consumo excesivo: las numerosas aceleraciones y desaceleraciones de los brazos del robot, en cada cambio de dirección. Por lo tanto, los socios han desarrollado un software de simulación que crea trayectorias menos empinadas para la misma tarea en cuestión. ¡Y demostró en el laboratorio que podríamos ganar hasta un 50 % de energía. [7]
En muchos casos, la especificación es "llevar un objeto del punto A al punto B en un tiempo t, con el tiempo t a veces expresado como una tasa (realizando el movimiento n veces por hora). El diseño consiste en :
- Elegir una solución tecnológica para guiar el movimiento, ya sea en los casos simples:
- Traslado rectilíneo guiado por un eslabón deslizante o equivalente (sistema de raíles/rodillos), el más sencillo de imaginar, pero potencialmente sujeto a arriostremiento ;
- movimiento circular de traslación (si el objeto debe mantener la misma orientación, típicamente con un paralelogramo deformable) o movimiento de rotación, simple de imaginar, y generalmente más interesante (eslabón pivotante son generalmente más baratos y más robustos que los eslabones deslizantes), pero con una trayectoria más grande (por lo tanto requiere una mayor velocidad, y más espacio libre) ;
- Traslado pseudo rectilíneo, por ejemplo con el paralelogramo de Watt, combinando la ventaja de ambos (enlaces pivotantes robustos y baratos, trayectoria corta y compacta) ;
- Trayectoria más compleja, según se requiera (guiado por carril o leva, brazo robótico).
- Elige una solución tecnológica para crear el movimiento (actuador), controlarlo (automatismo, leva) y transmitirlo (transmisión).
- En función de la trayectoria (por tanto la solución tecnológica de guiado), determinar las leyes del movimiento para cumplir las especificaciones (duración del movimiento admisible) ahorrando las piezas (limitación de los esfuerzos y por tanto de la aceleración) y el consumo de energía (limitación de las aceleraciones y de la velocidad, ver los artículos Trabajo de una fuerza y Fricción).
- Según las leyes del movimiento, determinar la poder necesaria, y las fuerzas a las que están sometidas las partes.
- Dimensionar el sistema: elegir las piezas de los catálogos del proveedor, o diseñarlas (elegir los materiales, las dimensiones, dibujarlas).
Véase también
Referencias
- Bondi, Hermann (1980). org/details/relativitycommon0000bond/page/3 Relatividad y sentido común. Courier Dover Publications. pp. 3. ISBN 978-0-486-24021-3.
- Lehrman, Robert L. (1998). Physics the Easy Way. Barron's Educational Series. pp. 27. ISBN 978-0-7641-0236-3.
- Crew, Henry (2008). The Principles of Mechanics. BiblioBazaar, LLC. p. 43. ISBN 978-0-559-36871-4.
- Raymond A. Serway; Chris Vuille; Jerry S. Faughn (2008). College Physics, Volume 10. Cengage. p. 32. ISBN 9780495386933.
- Koshkin N.I., Shirkevich M.G. (1988). Periódico de física elemental (10.ª , revisión=M. edición). M.: Nauka. p. 256. ISBN 5-02-013833-9.
- Gráfico de la aceleración de W. Bolt; carrera de 100 m en los Juegos Olímpicos de Verano de 2008 en Pekín.
- Thierry, Lucas (19 de junio de 2014). Automobile; des robots qui ménagent leur énergie (3382). L'Usine nouvelle. p. 22.
Bibliografía
- Serway, Raymond A.; Jewett, John W. (2004). Physics for Scientists and Engineers (6.ª edición). Brooks/Cole. ISBN 0-534-40842-7.
- Tipler, Paul (2004). Physics for Scientists and Engineers: Mechanics, Oscillations and Waves, Thermodynamics (5th ed. edición). W. H. Freeman. ISBN 0-7167-0809-4.
- Ortega, Manuel R. (1989-2006). Lecciones de Física (4 volúmenes). Monytex. ISBN 84-404-4290-4. 84-398-9218-7, 84-398-9219-5, 84-604-4445-7.
- Resnick,Robert & Krane, Kenneth S. (2001). Physics (en inglés). Nueva York: John Wiley & Sons. ISBN 0-471-32057-9.
- Tipler, Paul A. (2000). Física para la ciencia y la tecnología (2 volúmenes). Barcelona: Ed. Reverté. ISBN 84-291-4382-3.
- Landau L.D., Lifshits E.M. «Mechanics». Edición 5, estereotipada. M.: Fizmatlit, 2004. 224 pp. (Física Teórica, volumen I). ISBN 5-9221-0055-6.
- David C. Cassidy, Gerald James Holton y F. James Rutherford. Comprensión de la física. Birkhäuser (inglés) ruso, 2002. ISBN 978-0-387-98756-9.
- Pauli W. Teoría de la relatividad. Dover, 1981. ISBN 978-0-486-64152-2.
- Michel Combarnous, Didier Desjardins y Christophe Bacon, Mecánica de sólidos y sistemas de sólidos, Dunod, coll. «Ciencias superiores», 2004, 3 e ed. ISBN 978-2-10-048501-7, pp. 25, 35-37, 38-40, 99-103.
- Jean-Louis Fanchon, guía mecánico, Nathan, 2001. ISBN 978-2-09-178965-1, pp. 134-135, 143-145, 153-154, 166-168, 180-181, 193-194.
Enlaces externos
 Wikimedia Commons alberga una categoría multimedia sobre Aceleración.
Wikimedia Commons alberga una categoría multimedia sobre Aceleración. Wikcionario tiene definiciones y otra información sobre aceleración.
Wikcionario tiene definiciones y otra información sobre aceleración.- Serie de vídeos explicativos sobre la aceleración en caída libre en YouTube.
- Chile Científico: Análisis del Movimiento Circular. Archivado el 1 de diciembre de 2008 en Wayback Machine.
- Acceleration and free fall Archivado el 19 de mayo de 2007 en Wayback Machine. Un capítulo del libro de texto, en línea (en inglés).
- Science aid: Movement (en inglés).
- Science.dirbix: Acceleration (en inglés).
- Acceleration Calculator (en inglés)
- Motion Characteristics for Circular Motion (en inglés)
| Control de autoridades |
|
|---|
 Datos: Q11376
Datos: Q11376- Multimedia: Acceleration / Q11376
 Recursos didácticos: Aceleración
Recursos didácticos: Aceleración