Diagrama de Dynkin
En el campo matemático de la teoría de Lie, un diagrama de Dynkin, llamado así por el matemático ruso Eugene Dynkin, es un tipo de grafo con algunos enlaces dobles o triples (representados como líneas dobles o triples). Los enlaces múltiples son, dentro de ciertas restricciones, dirigidos.
 Diagramas de Dynkin finitos |
 Diagramas de Dynkin afines (extendidos) |
El principal interés de los diagramas de Dynkin es como un medio para clasificar álgebras de Lie semisimples sobre cuerpos algebraicamente cerrados. Esto da lugar al grupo de Weyl, es decir, a muchos (aunque no todos) grupos de reflexión finitos. Los diagramas de Dynkin también pueden surgir en otros contextos.
El término diagrama de Dynkin puede ser ambiguo. En algunos casos, se considera que son grafos dirigidos, en cuyo caso corresponden a sistemas de raíces y álgebras de Lie semisimples, mientras que en otros casos se supone que no están dirigidos, en cuyo caso corresponden a grupos de Weyl; los diagramas dirigidos y producen el mismo diagrama no dirigido, correspondientemente denominado En este artículo, "diagrama de Dynkin" significa por defecto "diagrama de Dynkin dirigido", y los "diagramas de Dynkin no dirigidos" se denominarán explícitamente de esta manera.



Clasificación de las álgebras de Lie semisimples
El interés fundamental de los diagramas de Dynkin es que clasifican álgebras de Lie semisimples sobre cuerpos algebraicamente cerrados. Tales álgebras de Lie se clasifican a través de su sistema de raíces, que puede representarse mediante un diagrama de Dynkin, de acuerdo con las restricciones que deben cumplir, como se describe a continuación.
Prescindir de la dirección en los enlaces del grafo corresponde a reemplazar un sistema raíz por el grupo de reflexión finito que genera, el llamado Grupo de Weyl, y por lo tanto, los diagramas de Dynkin no dirigidos clasifican los grupos de Weyl.
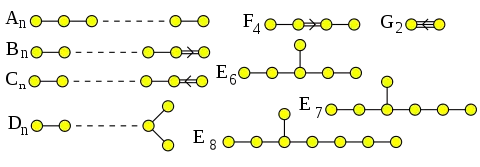
Presentan la siguiente correspondencia para las álgebras de Lie asociadas a grupos clásicos sobre los números complejos:
- , el álgebra de Lie lineal especial.
- , el grupo ortogonal de dimensión impar.
- , el álgebra de Lie simpléctica.
- , el grupo ortogonal de dimensión par ().









Para los grupos excepcionales, los nombres del álgebra de Lie y del diagrama de Dynkin asociado coinciden.
Clasificaciones relacionadas
Los diagramas de Dynkin se pueden interpretar como una clasificación de muchos objetos distintos relacionados entre sí, y la notación "An, Bn, ..." se utiliza para referirse a "todas" tales interpretaciones, según el contexto. El carácter ambiguo de esta notación puede generar interpretaciones confusas.
Su caracterización central implica que un álgebra de Lie simple tiene un sistema raíz, al que está asociado un diagrama de Dynkin (orientado); y por ejemplo, los tres pueden denominarse Bn.
El diagrama de Dynkin no orientado es una forma de diagrama de Coxeter, y corresponde al grupo de Weyl, que es el grupo de reflexión finito asociado al sistema raíz. Por lo tanto, Bn puede referirse al diagrama no orientado (un tipo especial de diagrama de Coxeter), al grupo de Weyl (un grupo de reflexión concreto) o al grupo abstracto de Coxeter.
Aunque el grupo de Weyl es abstractamente isomorfo al grupo de Coxeter, un isomorfismo específico depende de una elección ordenada de raíces simples.
Téngase en cuenta también que, si bien la notación del diagrama de Dynkin está estandarizada, el diagrama de Coxeter y la notación de grupo varían, y en algunas ocasiones concuerdan con la notación del diagrama de Dynkin y en otras no.
Por último, los objetos asociados "a veces" se denominan con la misma notación, aunque esto no siempre se puede hacer regularmente. Entre los ejemplos de esta circunstancia, se incluyen:
- La retícula raíz generada por el sistema raíz, como en el caso de la retícula E8, que se define naturalmente, pero no elemento a elemento. Por ejemplo, A2 y G2 generan ambos una retícula hexagonal.
- Un politopo asociado: por ejemplo, el politopo de Gosset 421 puede denominarse "politopo E8", ya que sus vértices se derivan del sistema raíz E8 y tiene el grupo E8 de Coxeter como grupo de simetría.
- Una forma cuadrática asociada o múltiple: por ejemplo, la variedad E8 tiene una forma de intersección dada por la red E8.
Estas últimas notaciones se usan principalmente para objetos asociados con diagramas excepcionales; los objetos asociados a los diagramas regulares (A, B, C, D) tienen nombres tradicionales.
El índice (la letra n) es igual al número de nodos en el diagrama, el número de raíces simples en una base, la dimensión de la red reticular y el tramo del sistema raíz, el número de generadores del grupo de Coxeter, y el rango del álgebra de Lie. Sin embargo, n no equivale a la dimensión del módulo de definición (una representación fundamental) del álgebra de Lie: el índice del diagrama de Dynkin no debe confundirse con el índice del álgebra de Lie. Por ejemplo, corresponde a que actúa naturalmente en el espacio de 9 dimensiones, pero tiene el rango 4 como álgebra de Lie.


Los diagramas simplemente enlazados de Dynkin, aquellos sin enlaces múltiples (A, D, E) clasifican muchos objetos matemáticos adicionales.
Ejemplo: A2
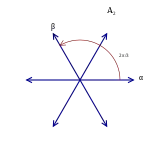

Por ejemplo, el símbolo puede referirse a:
- El diagrama de Dynkin con 2 nodos conectados,

 , que también puede interpretarse como un diagrama de Coxeter.
, que también puede interpretarse como un diagrama de Coxeter. - El sistema de raíces con 2 raíces simples en un ángulo de (120 grados).
- El álgebra de Lie de rango 2.
- El grupo de Weyl de simetrías de las raíces (reflexiones en el hiperplano ortogonal a las raíces), isomorfo al grupo simétrico (de orden 6).
- El grupo de Coxeter abstracto, presentado por generadores y relaciones,




Construcción a partir de sistemas raíz
Considérese un sistema de raíces, que se supone reducido e integral (o "cristalográfico"). En muchas aplicaciones, este sistema raíz surgirá de un álgebra de Lie semisimple. Sea un conjunto de raíces simples positivas. A continuación se construye un diagrama de la manera que se explica a continuación.[1] Se forma un gráfico con un vértice para cada elemento de , y luego se insertan los enlaces entre cada par de vértices de acuerdo con la regla siguiente. Si las raíces correspondientes a los dos vértices son ortogonales, no hay enlace entre los vértices. Si el ángulo entre las dos raíces es de 120 grados, se coloca un enlace entre los vértices. Si el ángulo es de 135 grados, se colocan dos enlaces, y si el ángulo es de 150 grados, se coloca un enlace triple (estos cuatro casos agotan todos los ángulos posibles entre pares de raíces simples positivas).[2] Finalmente, si existen enlaces entre un par de vértices dado, se marcan con una flecha que apunta desde el vértice correspondiente a la raíz más larga hasta el vértice correspondiente a la más corta (la flecha se omite si las raíces tienen la misma longitud). Al pensar en la flecha como un signo "mayor que", queda claro en qué dirección debe ir la flecha. Los diagramas de Dynkin conducen a una clasificación de sistemas de raíces. Los ángulos y las relaciones de longitud entre las raíces están ligadas entre sí.[3] Por lo tanto, los enlaces de las raíces no ortogonales pueden describirse alternativamente como un enlace para una relación de longitud de 1, un enlace doble para una relación de longitud de y un enlace triple para una relación de longitud de (no se colocan enlaces cuando las raíces son ortogonales, independientemente de la relación de longitud).



En el sistema raíz A2, que se muestra a la derecha, las raíces etiquetadas y forman una base. Dado que estas dos raíces tienen un ángulo de 120 grados (con una relación de longitud de 1), el diagrama de Dynkin consta de dos vértices conectados por un solo borde: ![]()
![]()
![]() .
.


Restricciones
Los diagramas de Dynkin deben satisfacer ciertas restricciones, esencialmente aquellas satisfechas por los diagramas de Coxeter–Dynkin finitos, junto con una restricción cristalográfica adicional.
Conexión con los diagramas de Coxeter
Los diagramas de Dynkin están estrechamente relacionados con los diagramas de Coxeter-Dynkin de los Grupos de Coxeter finitos, y su terminología a menudo se combina.[nota 1]
Los diagramas de Dynkin difieren de los diagramas de Coxeter de grupos finitos en dos aspectos importantes:
- Dirigido en parte
- los diagramas de Dynkin son parcialmente dirigidos: cualquier enlace múltiple (en términos de Coxeter, etiquetado con "4" o superior) tiene una dirección (una flecha que apunta de un nodo al otro); así, los diagramas de Dynkin tienen "más" datos que los diagramas de Coxeter subyacentes (con gráficos no dirigidos).
- En el nivel de los sistemas raíz, la dirección corresponde a apuntar hacia el vector más corto; los enlaces etiquetados como "3" no tienen dirección porque los vectores correspondientes deben tener la misma longitud. (Precaución: algunos autores invierten esta convención, con la flecha apuntando hacia el vector más largo).
- Restricción cristalográfica
- los diagramas de Dynkin deben satisfacer una restricción adicional, a saber, que las únicas etiquetas de enlace permitidas son 2, 3, 4 y 6, una restricción que no comparten los diagramas de Coxeter, por lo que no todos los diagramas de Coxeter de un grupo finito provienen de un diagrama de Dynkin.
- En el nivel de los sistemas raíz, esto corresponde al teorema de restricción cristalográfica, ya que las raíces forman una retícula.
Otra diferencia, solo estilística, es que los diagramas de Dynkin se dibujan convencionalmente con enlaces dobles o triples entre nodos (para p = 4, 6), en lugar de con un enlace etiquetado con su grado de multiplicidad p.
El término "diagrama de Dynkin" a veces se refiere al gráfico "dirigido", y a veces al gráfico "no dirigido". Para mayor precisión, en este artículo "diagrama de Dynkin" significará "dirigido", y el gráfico subyacente no dirigido se denominará "diagrama de Dynkin no dirigido". Entonces los diagramas de Dynkin y los diagramas de Coxeter pueden relacionarse de la siguiente manera:
| Cristalográfico | Grupo puntual | |
|---|---|---|
| Dirigido | Diagramas de Dynkin | |
| No dirigido | Diagramas de Dynkin no dirigidos | Diagramas de Coxeter de grupos finitos |
Esto significa que los diagramas de Coxeter de grupos finitos corresponden a grupos puntuales generados por reflexiones, mientras que los diagramas Dynkin deben satisfacer una restricción adicional correspondiente al teorema de restricción cristalográfica, y que los diagramas Coxeter no están dirigidos, mientras que los diagramas de Dynkin están (parcialmente) dirigidos.
Los objetos matemáticos correspondientes clasificados por los diagramas son:
| Cristalográfico | Grupo puntual | |
|---|---|---|
| Dirigido | Sistemas de raíces | |
| No dirigido | Grupos de Weyl | Grupos de Coxeter finitos |
El espacio en blanco en la parte superior derecha, correspondiente a gráficos dirigidos con un gráfico subyacente no dirigido a cualquier diagrama de Coxeter (de un grupo finito), se puede definir formalmente, pero se discute poco y no parece admitir una interpretación simple en términos de objetos matemáticos de interés.
Existen aplicaciones naturales hacia abajo, desde diagramas de Dynkin hasta diagramas de Dynkin no dirigidos; respectivamente, desde los sistemas raíz hasta los grupos Weyl asociados, y hacia la derecha, desde los diagramas de Dynkin no dirigidos hasta los diagramas de Coxeter; respectivamente de grupos Weyl a grupos Coxeter finitos.
La aplicación descendente está generada sobre (por definición), pero no elemento a elemento, ya que los diagramas Bn y C n se asignan al mismo diagrama no dirigido, con el diagrama de Coxeter resultante, y por lo tanto el grupo de Weyl a veces es denotado BCn.
La aplicación propia es simplemente una inclusión: los diagramas de Dynkin no dirigidos son casos especiales de los diagramas de Coxeter, y los grupos de Weyl son casos especiales de los grupos de Coxeter finitos, y no están sobre, ya que no todos los diagramas de Coxeter son diagramas de Dynkin no dirigidos (los diagramas perdidos son H3,H4 e I2 (p) parap = 5 p ≥ 7), y en consecuencia, no todos los grupos de Coxeter finitos son un grupo de Weyl.
Isomorfismos

Los diagramas de Dynkin están numerados de manera convencional para que la lista no sea redundante: para para para para y comenzando en Las familias se pueden definir para un n menor, produciendo un isomorfismo excepcional de diagramas, e isomorfismos excepcionales correspondientes de álgebras de Lie y grupos de Lie asociados.










Trivialmente, se pueden comenzar las familias en o que son isomórficas, ya que existe un diagrama vacío único y un diagrama único de 1 nodo. Los otros isomorfismos de los diagramas de Dynkin conectados son:









Estos isomorfismos corresponden al isomorfismo de álgebras de Lie simples y semisimples, que también corresponden a ciertos isomorfismos de las formas grupales de Lie. También agregan contexto a familia de En.[4]
Automorfismos

Además del isomorfismo entre diferentes diagramas, algunos diagramas también poseen autoisomorfismos o "automorfismos". Los automorfismos de diagrama corresponden a automorfismos externos del álgebra de Lie, lo que significa que el grupo de automorfismo externo Out = Aut/Inn es igual al grupo de automorfismos de diagrama.[5][6][7]
Los diagramas que tienen automorfismos no triviales son An (), Dn () y E6. En todos estos casos, excepto D4, existe un único automorfismo no trivial (Out = C2, el grupo cíclico de orden 2), mientras que para D4, el grupo de automorfismo es el grupo simétrico sobre tres letras (S3, orden 6). Este fenómeno se conoce como "trialidad". Sucede que todos estos automorfismos de diagrama se pueden realizar como simetrías euclidianas de cómo se dibujan los diagramas convencionalmente en el plano, pero esto es solo un artefacto de cómo se dibujan, y no una estructura intrínseca en sí misma.
Para An, el automorfismo del diagrama está invirtiendo el diagrama, que es una recta. Los nodos del diagrama indexan los pesos fundamentales, que (para An−1) son para , y el automorfismo del diagrama corresponde a la dualidad Realizado como el álgebra de Lie , el automorfismo externo se puede expresar como transposición negativa, , que es como actúa la representación dual.[6]






Para Dn, el diagrama de automorfismo es cambiar los dos nodos al final de la Y, y corresponde a cambiar las dos representaciones de espín quirales. Realizado como el álgebra de Lie , el automorfismo externo puede expresarse como conjugación mediante una matriz en O (2n) con determinante −1 por lo que sus automorfismos coinciden, mientras que está desconectado, y el automorfismo corresponde a cambiar los dos nodos.



Para D4, la representación fundamental es isomorfa a las dos representaciones de espín, y el grupo simétrico resultante en tres letras (S3, o alternativamente el grupo diedral de orden 6, Dih3) corresponde tanto al automorfismo del álgebra de Lie como al automorfismo del diagrama.

El grupo de automorfismo de E6 corresponde a invertir el diagrama, y puede expresarse usando álgebras de Jordan.[6][8]
Los diagramas desconectados, que corresponden a álgebras de Lie "semi"simples, pueden tener automorfismos por el intercambio de componentes del diagrama.
Con característica positiva existen "automorfismos de diagrama" adicionales: en términos generales, en la característica p a veces se permite ignorar la flecha en los enlaces de multiplicidad p en el diagrama de Dynkin correspondientes a los automorfismos de diagrama. Por lo tanto, en la característica 2 hay un automorfismo de orden 2 de y de F4, mientras que en la característica 3 existe un automorfismo de orden 2 de G2. Pero no se aplica en todas las circunstancias: por ejemplo, tales automorfismos no necesitan surgir como automorfismos del grupo algebraico correspondiente, sino en el nivel de puntos valorados en un campo finito.

Construcción de grupos de Lie a través de diagramas de automorfismos
Los automorfismos de diagrama a su vez producen grupos de Lie adicionales y grupos de tipo Lie, que son de importancia central en la clasificación de grupos simples finitos.
La construcción del grupo de Chevalley de los grupos de Lie en términos de su diagrama de Dynkin no produce algunos de los grupos clásicos, a saber, los grupos unitarios y el grupo ortogonal no dividido. Los grupos de Steinberg articulan los grupos unitarios 2An, mientras que los otros grupos ortogonales se construyen como 2Dn, donde en ambos casos se hace referencia a combinar un diagrama de automorfismo con un campo de automorfismo. Esto también produce grupos de Lie exóticos adicionales 2E6 y 3D4 (este último solo se define en campos con un automorfismo de orden 3).
Los automorfismos del diagrama adicional en características positivas producen los grupos de Suzuki-Ree, 2B2, 2F4 y 2G2.
Plegado


Un diagrama de Dynkin (simple) (finito o afín) que tiene una simetría (que satisface una condición, según se detalla a continuación) puede ser estructurado en torno a una simetría, produciendo un nuevo diagrama generalmente de múltiples líneas, con el proceso llamado "plegado" '(debido a que la mayoría de las simetrías aparecen dos veces). A nivel de álgebras de Lie, esto corresponde a tomar el subálgebra invariante bajo el grupo de automorfismo externo, y el proceso se puede definir únicamente con referencia a los sistemas de raíces, sin usar diagramas.[9] Además, cada diagrama de múltiples cordones (finito o infinito) se puede obtener plegando un diagrama simple.[10]
La única condición en el automorfismo para que el plegado sea posible es que nodos distintos del gráfico en la misma órbita (bajo el automorfismo) no deben estar conectados por un enlace; a nivel de los sistemas de raíces, las raíces en la misma órbita deben ser ortogonales.[10] A nivel de los diagramas, esto es necesario, ya que de lo contrario el diagrama del cociente tendría un bucle, debido a la identificación de dos nodos pero con un enlace entre ellos, y los bucles no están permitidos en los diagramas de Dynkin.
Los nodos y enlaces del diagrama del cociente ("plegado") son las órbitas de los nodos y enlaces del diagrama original; los enlaces son únicos a menos que dos enlaces incidentes se asignen al mismo enlace (especialmente en los nodos de valencia mayores que 2): un "punto de ramificación" del mapa, en cuyo caso el peso es el número de enlaces incidentes y los puntos de flecha hacia el nodo en el que inciden: "el punto de ramificación se asigna al punto no homogéneo". Por ejemplo, en D4 plegado a G2, el enlace en G2 apunta desde la clase de los 3 nodos externos (valencia 1) a la clase del nodo central (valencia 3).
Los pliegues de los diagramas finitos son:[11][nota 2]
- (el automorfismo de A2n no produce un plegamiento porque los dos nodos centrales están conectados por un enlace, pero en la misma órbita).
- (si está haciendo un cociente por el grupo completo o un ciclo 3, además de de 3 formas diferentes, o si se está haciendo un cociente por una involución)





Existen plegamientos similares para diagramas afines, que incluyen:




La noción de plegamientos también se puede aplicar de manera más general a diagramas de Coxeter;[12] en particular, se pueden generalizar los cocientes permitidos de los diagramas de Dynkin a Hn e I2(p). Geométricamente, esto corresponde a las proyecciones de un politopo uniforme. Cabe destacar que cualquier diagrama de Dynkin simplemente entrelazado se puede plegar a I2(h), donde h es el número de Coxeter, que corresponde geométricamente a la proyección al plano de Coxeter.
El plegado se puede aplicar para reducir las preguntas sobre álgebras de Lie (semisimples) a cuestiones sobre las de unión simple, junto con un automorfismo, que puede ser más simple que tratar las álgebras de unión múltiple directamente. Esto se puede hacer en la construcción de las álgebras de Lie semisimples, por ejemplo. Consúltese Desbordamiento matemático: plegado por automatismos para obtener más información.
Otros mapas de diagramas
Sistema raíz A2 |
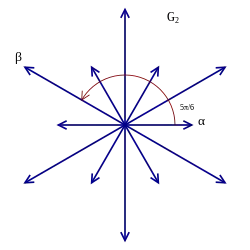 Sistema raíz G2 |
Algunos mapas adicionales de diagramas tienen interpretaciones significativas, como se detalla a continuación. Sin embargo, no todos los mapas de sistemas raíz surgen como mapas de diagramas.[13]
Por ejemplo, hay dos inclusiones de sistemas de raíz de A2 en G2, ya sea como las seis raíces largas o las seis raíces cortas. Sin embargo, los nodos en el diagrama G2 corresponden a una raíz larga y una raíz corta, mientras que los nodos en el diagrama A2 corresponden a raíces de igual longitud y, por lo tanto, este mapa de sistemas raíz no puede expresarse como un mapa de los diagramas.
Algunas inclusiones de sistemas raíz se pueden expresar como un diagrama que es un subgrafo inducido de otro, que significa "un subconjunto de los nodos, con todos los enlaces entre ellos". Esto se debe a que eliminar un nodo de un diagrama de Dynkin corresponde a eliminar una raíz simple de un sistema raíz, lo que produce un sistema raíz de rango uno más bajo. Por el contrario, eliminar un enlace (o cambiar su multiplicidad) mientras se dejan los nodos sin cambios, corresponde a cambiar los ángulos entre las raíces, lo que no se puede hacer sin cambiar todo el sistema raíz. Por lo tanto, se pueden eliminar significativamente los nodos, pero no los enlaces. Eliminar un nodo de un diagrama conectado puede producir otro diagrama conectado (álgebra de Lie simple), si el nodo es una variedad, o un diagrama desconectado (un álgebra de Lie semisimple pero no simple), con dos o tres componentes (este último para Dn y En). Al nivel de las álgebras de Lie, estas inclusiones corresponden a las subálgebras de Lie.
Los subgrafos máximos son los siguientes (los relacionados por un diagrama de automorfismo están etiquetados como "conjugado"):
- An+1: An, en 2 formas conjugadas
- Bn+1: An, Bn
- Cn+1: An, Cn
- Dn+1: An (2 formas conjugadas), Dn
- En+1: An, Dn, En
- Para E6, dos de estos coinciden: y son conjugados
- F4: B3, C3
- G2: A1, en 2 formas no conjugadas (como una raíz larga o una raíz corta)

Finalmente, la dualidad de los diagramas corresponde a invertir la dirección de las flechas, si las hay:[13] Bn y Cn son duales, mientras que F4 y G2 son auto-duales, al igual que los diagramas ADE de líneas simples.
Entrelazado simple
Un diagrama de Dynkin sin enlaces múltiples se llama simplemente entrelazado, al igual que el álgebra de Lie y el grupo de Lie correspondientes. Estos son los diagramas , y los fenómenos que clasifican tales diagramas se denominan clasificación ADE. En este caso, los diagramas de Dynkin coinciden exactamente con los diagramas de Coxeter, ya que no se incluyen enlaces múltiples.

Diagramas de Satake
Los diagramas de Dynkin clasifican álgebras de Lie semisimples complejas. Las álgebras de Lie semisimples reales se pueden clasificar como formas reales de álgebras de Lie semisimples complejas, y estas se clasifican por el diagrama de Satake, que se obtiene del diagrama de Dynkin etiquetando algunos vértices negros (rellenos) y conectando algunos otros vértices en pares por flechas, de acuerdo con ciertas reglas.
Historia
Los diagramas de Dynkin llevan el nombre de Eugene Dynkin, que los utilizó en dos documentos (1946, 1947) que simplifican la clasificación de álgebras de Lie semisimples;[14] ver (Dynkin, 2000). Cuando Dynkin abandonó la Unión Soviética en 1976, lo que por entonces se consideraba equivalente a la traición, se ordenó a los matemáticos soviéticos que se refirieran a "diagramas de raíces simples" en lugar de usar su nombre. [cita requerida]
Los gráficos no dirigidos habían sido utilizados anteriormente por Coxeter (1934) para clasificar los grupos de reflexión, donde los nodos correspondían a reflexiones simples; Witt (1941) utilizó los gráficos (con información de longitud) en referencia a los sistemas raíz, con los nodos correspondientes a raíces simples, tal como se usan hoy en día.[14][15] Dynkin los usó en 1946 y 1947, reconociendo a Coxeter y Witt en su artículo de 1947.
Convenciones
Los diagramas de Dynkin se han dibujado de distintas maneras.[15] La convención que se sigue aquí es la más común, con ángulos de 180° en los nodos de valencia 2, ángulos de 120° en el nodo de valencia 3 de Dn y ángulos de 90°/90°/180° en el nodo de valencia 3 de En, con multiplicidad indicada por 1, 2 o 3 enlaces paralelos, y longitud de raíz indicada dibujando una flecha en el enlace para indicar su orientación. Más allá de la simplicidad, un beneficio adicional de esta convención es que los automorfismos de diagrama son realizados por isometrías euclídeas de los diagramas.
La convención alternativa incluye escribir un número en el enlace para indicar multiplicidad (comúnmente usado en los diagramas de Coxeter), rellenar de negro los nodos para indicar la longitud de la raíz o usar ángulos de 120° en los nodos de valencia 2 para lograr que sean más distinguibles.
También hay convenciones sobre la numeración de los nodos. La convención moderna más común se había desarrollado en la década de 1960 y se ilustra en (Bourbaki, 1968).[15]
Diagramas de Dynkin de rango 2
Los diagramas de Dynkin son equivalentes a las matrices de Cartan generalizadas, como se muestra en esta tabla de diagramas de Dynkin de rango 2 con sus correspondientes matrices de Cartan 2x2.
Para el rango 2, la forma de la matriz de Cartan es:
![{\displaystyle A=\left[{\begin{matrix}2&a_{12}\\a_{21}&2\end{matrix}}\right]}](../I/3f0c38b6f92dd343e402c1f09e8a077371712646.svg)
Un diagrama de varios enlaces corresponde a los elementos de la matriz de Cartan no diagonales -a21, -a12, con el número de enlaces dibujados igual a max(-a21, -a12), y una flecha apuntando hacia elementos que no son unitarios.
Una matriz de Cartan generalizada es una matriz cuadrada tal que:

- Para entradas diagonales, .
- Para entradas no diagonales, .
- si y solo si




La matriz de Cartan determina si el grupo es de tipo finito (si es una matriz positiva-definida, es decir, todos sus valores propios son positivos), de tipo afín (si no es positiva-definida pero sí positiva-semidefinida, es decir, todos sus valores propios no son negativos) o de tipo indefinido. El tipo indefinido a menudo se subdivide aún más, por ejemplo, un grupo de Coxeter es Lorentziano si tiene un valor propio negativo y todos los demás valores propios son positivos. Además, varias fuentes se refieren a grupos Coxeter hiperbólicos, pero hay varias definiciones no equivalentes para este término. En la discusión que figura a continuación, los grupos de Coxeter hiperbólicos son un caso especial de los Lorentzianos, que satisfacen una condición adicional. Para el rango 2, todas las matrices de Cartan determinantes negativas corresponden al grupo de Coxeter hiperbólico. Pero en general, la mayoría de las matrices determinantes negativas no son ni hiperbólicas ni lorentzianas.
Las ramas finitas tienen (-a21, -a12) = (1,1), (2,1), (3,1), y las ramas afines (con un determinante cero) tienen (-a21, -a12) = (2, 2) o (4,1).
| Grupo Nombre |
Diagrama de Dynkin | Matriz de Cartan | Orden de Simetría |
Grupo3 Entrelazado simple Relacionado | |||
|---|---|---|---|---|---|---|---|
| Grafo Multienlazado (Estándar) |
Grafo1 con valores |
Grafo2 Coxeter |
Determinante (4-a21*a12) | ||||
| Finito (Determinante>0) | |||||||
| A1xA1 | 4 | 2 | |||||
| A2 (no dirigido) |
3 | 3 | |||||
| B2 | 2 | 4 | | ||||
| C2 | 2 | 4 | | ||||
| BC2 (no dirigido) |
2 | 4 | |||||
| G2 | 1 | 6 | | ||||
| G2 (no dirigido) |
1 | 6 | |||||
| Afín (Determinante=0) | |||||||
| A1(1) | 0 | ∞ | | ||||
| A2(2) | 0 | ∞ | | ||||
| Hiperbólico (Determinante<0) | |||||||
| -1 | - | ||||||
| -2 | - | ||||||
| -2 | - | ||||||
| -3 | - | ||||||
| -4 | - | ||||||
| -4 | - | ||||||
| -5 | - | ||||||
| 4-ab<0 | - | ||||||
|
Nota1: Para grupos hiperbólicos, (a12*a21>4), el estilo de enlaces múltiples se sustituye por un etiquetado explícito (a21, a12) sobre el enlace. Por lo general, no se aplica a gráficos finitos y ni a afines.[16] Nota2: Para grupos no dirigidos, los diagramas de Coxeter son intercambiables. Por lo general, están etiquetados por su orden de simetría, con el orden 3 implícito sin etiqueta. Nota3: Se pueden obtener muchos grupos con enlaces múltiples a partir de un grupo de niveles simples de rango superior mediante la aplicación de una operación de plegado. | |||||||
![{\displaystyle \left[{\begin{matrix}2&a_{12}\\a_{21}&2\end{matrix}}\right]}](../I/609b9b4324da49c4903330c430b14203d6f971cb.svg)
![{\displaystyle \left[{\begin{smallmatrix}2&0\\0&2\end{smallmatrix}}\right]}](../I/58d402f7fd38428fe2ac791f5a5d12bf7832c69f.svg)
![{\displaystyle \left[{\begin{smallmatrix}2&-1\\-1&2\end{smallmatrix}}\right]}](../I/18cb26b504d63dba11f3a12c7ee8fa25fe3bdf0a.svg)
![{\displaystyle \left[{\begin{smallmatrix}2&-2\\-1&2\end{smallmatrix}}\right]}](../I/07ca67f2863fd2e6f5a6d91133f30d43a1c95805.svg)

![{\displaystyle \left[{\begin{smallmatrix}2&-1\\-2&2\end{smallmatrix}}\right]}](../I/9a86fb5415f60aea3cee78429d52d340fc1df9ab.svg)
![{\displaystyle \left[{\begin{smallmatrix}2&-{\sqrt {2}}\\-{\sqrt {2}}&2\end{smallmatrix}}\right]}](../I/934421fb85592c1788a92b7d350953dd2ca94b5e.svg)
![{\displaystyle \left[{\begin{smallmatrix}2&-1\\-3&2\end{smallmatrix}}\right]}](../I/8008c32cde8626798763d8c84924571bffad4812.svg)

![{\displaystyle \left[{\begin{smallmatrix}2&-{\sqrt {3}}\\-{\sqrt {3}}&2\end{smallmatrix}}\right]}](../I/3b77e92921199a57f051014d4938de1a0d22ef38.svg)
![{\displaystyle \left[{\begin{smallmatrix}2&-2\\-2&2\end{smallmatrix}}\right]}](../I/cd86323eaf497d2bb96f757556dd458abd5863cf.svg)

![{\displaystyle \left[{\begin{smallmatrix}2&-1\\-4&2\end{smallmatrix}}\right]}](../I/0ee764ce2933d720bd85ab4f4425789a0452bb97.svg)

![{\displaystyle \left[{\begin{smallmatrix}2&-1\\-5&2\end{smallmatrix}}\right]}](../I/b5f8667328ef032fcc28485f9498d0aa472592ef.svg)
![{\displaystyle \left[{\begin{smallmatrix}2&-2\\-3&2\end{smallmatrix}}\right]}](../I/de5c1b92cef68df449f22b4667b47f409865b4a9.svg)
![{\displaystyle \left[{\begin{smallmatrix}2&-1\\-6&2\end{smallmatrix}}\right]}](../I/209a341193290b49c172a7b764b7c280f8a4e95e.svg)
![{\displaystyle \left[{\begin{smallmatrix}2&-1\\-7&2\end{smallmatrix}}\right]}](../I/13892cd6e699b3c266c6f2c5155a7d3a81171728.svg)
![{\displaystyle \left[{\begin{smallmatrix}2&-2\\-4&2\end{smallmatrix}}\right]}](../I/3373a4f62ccb77cbfad04b43f2a9b57dc7fdc618.svg)
![{\displaystyle \left[{\begin{smallmatrix}2&-1\\-8&2\end{smallmatrix}}\right]}](../I/457a113c8f8ee31dbb097965abe5da05593e254b.svg)
![{\displaystyle \left[{\begin{smallmatrix}2&-3\\-3&2\end{smallmatrix}}\right]}](../I/58de83867bd03b11edff1e45a0f03073a287b066.svg)
![{\displaystyle \left[{\begin{smallmatrix}2&-b\\-a&2\end{smallmatrix}}\right]}](../I/c6f2eb2e6d752a7d458a6c9892cee665463ab8fa.svg)
Diagramas finitos de Dynkin
| Rango | Grupos de Lie clásicos | Grupos de Lie excepcionales | ||||
|---|---|---|---|---|---|---|
| / | ||||||
| 1 | A1 |
|||||
| 2 | A2 |
B2 |
C2=B2 |
D2=A1A1 |
G2 | |
| 3 | A3 |
B3 |
C3 |
D3=A3 |
E3=A2A1 |
|
| 4 | A4 |
B4 |
C4 |
D4 |
E4=A4 |
F4 |
| 5 | A5 |
B5 |
C5 |
D5 |
E5=D5 | |
| 6 | A6 |
B6 |
C6 |
D6 |
E6 | |
| 7 | A7 |
B7 |
C7 |
D7 |
E7 | |
| 8 | A8 |
B8 |
C8 |
D8 |
E8 | |
| 9 | A9 |
B9 |
C9 |
D9 | ||
| 10+ | .. | .. | .. | .. | ||







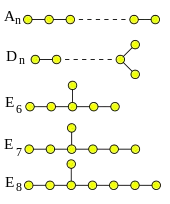
Diagramas afines de Dynkin
Existen extensiones de diagramas de Dynkin, como los diagramas afines de Dynkin, que clasifican las matrices de Cartan dentro de las álgebras de Lie afines. Estas a su vez se clasifican en (Kac, 1994, Chapter 4, pp. 47–), y son enumeradas específicamente en (Kac, 1994, pp. 53–55). Los diagramas afines se denotan como o donde X es la letra del diagrama finito correspondiente, y el exponente depende de la serie de diagramas afines en los que se encuentren. En primer lugar, los son los más comunes y se denominan diagramas extendidos de Dynkin y se denotan con una virgulilla, y también a veces se marcan con un superíndice "+".[17] como en . Las series (2) y (3) se denominan diagramas afines torsionados.




Consúltese el generador de diagramas de Dynkin para ver estos diagramas.
El conjunto de diagramas afines extendidos de Dynkin, con nodos agregados en verde ( para y para ) |
 Las formas afines "torsionadas" se denominan con los superíndices (2) o (3). (El subíndice k siempre cuenta el número de nodos amarillos en el gráfico, es decir, el número total de nodos menos 1) |

En el artículo figuran todos los gráficos de Dynkin para grupos afines de hasta 10 nodos. Los gráficos extendidos de Dynkin se dan como las familias ~, lo mismo que los gráficos finitos anteriores, con un nodo agregado. Otras variaciones de gráfico dirigido se dan con un valor de superíndice (2) o (3), que representa plegamientos de grupos de orden superior. Estos se clasifican como diagramas afines torsionados.[18]


































































































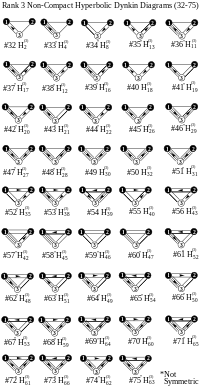
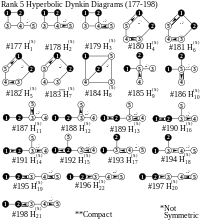
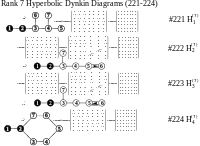
Diagramas de Dynkin hiperbólicos y superiores
Se enumera el conjunto de gráficos Dynkin hiperbólicos compactos y no compactos.[19] Todos los gráficos hiperbólicos de rango 3 son compactos. Los diagramas hiperbólicos compactos de Dynkin existen hasta el rango 5, y los gráficos hiperbólicos no compactos existen hasta el rango 10.
| Rango | Compacto | No compacto | Total |
|---|---|---|---|
| 3 | 31 | 93 | 123 |
| 4 | 3 | 50 | 53 |
| 5 | 1 | 21 | 22 |
| 6 | 0 | 22 | 22 |
| 7 | 0 | 4 | 4 |
| 8 | 0 | 5 | 5 |
| 9 | 0 | 5 | 5 |
| 10 | 0 | 4 | 4 |
Diagramas hiperbólicos compactos de Dynkin
| Rango 3 | Rango 4 | Rango 5 | |
|---|---|---|---|
Grafos lineales
|
Grafos cíclicos
|
|
|
No compacto (formas sobre extendidas)
Algunas notaciones usadas en física teórica, como en la teoría M, usan un superíndice "+" para grupos extendidos en lugar de un "~" y esto permite definir grupos de extensiones más altas.
- Extendido Los diagramas de Dynkin (afines) reciben "+" y representan un nodo agregado. (Igual que "~")
- Diagramas de Dynkin sobreextendidos (hiperbólicos) reciben "^" o "++" y representan dos nodos agregados.
- Muy extendido Los diagramas de Dynkin con 3 nodos agregados se dan como "+++".
| Rank | = An-2(1)^ | = Bn-2(1)^ |
Cn-2(1)^ | = Dn-2(1)^ | E / F / G |
|---|---|---|---|---|---|
| 3 | : |
||||
| 4 | : |
C2(1)^ A4(2)'^ A4(2)^ D3(2)^ |
G2(1)^ D4(3)^ | ||
| 5 | : |
C3(1)^ A6(2)^ A6(2)'^ D5(2)^ | |||
| 6 | C4(1)^ A8(2)^ A8(2)'^ D7(2)^ |
F4(1)^ E6(2)^ | |||
| 7 | |||||
| 8 | E6(1)^ | ||||
| 9 | E7(1)^ | ||||
| 10 | =E8(1)^ |





























Grupos hiperbólicos (compactos y no compactos)
Los 238 grupos hiperbólicos (compactos y no compactos) de rango se nombran como y se enumeran como para cada rango.











Grupos muy extendidos
Los grupos muy extendidos son [[Grupo de Lorentz|grupos de Lorentz]], definidos al agregar tres nodos a los grupos finitos. E8, E7, E6, F4 y G2 ofrecen seis series que finalizan como grupos muy extendidos. Otras series extendidas que no se muestran se pueden definir a partir de An, Bn, Cn y Dn, como series diferentes para cada n. El determinante de la matriz de Cartan asociada determina dónde cambia la serie de finito (positivo) a afín (cero) a un grupo hiperbólico no compacto (negativo), y termina como un grupo de Lorentz que se puede definir con el uso de una dimensión espacio-tiempo, y es utilizado en Teoría M.[20]
| Finito | |||
|---|---|---|---|
| 2 | A2 |
C2 |
G2 |
| 3 | A2+= |
C2+= |
G2+= |
| 4 | A2++ |
C2++ |
G2++ |
| 5 | A2+++ |
C2+++ |
G2+++ |
| Det(Mn) | 3(3-n) | 2(3-n) | 3-n |


| Finito | ||||||||
|---|---|---|---|---|---|---|---|---|
| 2 | A12 |
A2 | ||||||
| 3 | A3 |
B3 |
C3 |
B2A1 |
A13 |
|||
| 4 | A3+= |
B3+= |
C3+= |
A4 |
B4 |
C4 |
D4 |
F4 |
| 5 | A3++ |
B3++ |
C3++ |
A4+= |
B4+= |
C4+= |
D4+= |
F4+= |
| 6 | A3+++ |
B3+++ |
C3+++ |
A4++ |
B4++ |
C4++ |
D4++ |
F4++ |
| 7 | A4+++ |
B4+++ |
C4+++ |
D4+++ |
F4+++ | |||
| Det(Mn) | 4(4-n) | 2(4-n) | 5(5-n) | 2(5-n) | 4(5-n) | 5-n | ||







| Finite | |||||||
|---|---|---|---|---|---|---|---|
| 4 | B3A1 |
A3A1 |
A22 | ||||
| 5 | A5 |
D5 |
B4A1 |
D4A1 |
A5 | ||
| 6 | A5+= |
B5+= |
D5+= |
A6 |
B6 |
D6 |
E6 |
| 7 | A5++ |
B5++ |
D5++ |
A6+= |
B6+= |
D6+= |
E6+= |
| 8 | A5+++ |
B5+++ |
D5+++ |
A6++ |
B6++ |
D6++ |
E6++ |
| 9 | A6+++ |
B6+++ |
D6+++ |
E6+++ | |||
| Det(Mn) | 6(6-n) | 2(6-n) | 4(6-n) | 7(7-n) | 2(7-n) | 4(7-n) | 3(7-n) |







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Véase también
- Diagrama de Satake
- Anexo:Lista de índices de Tits irreducibles
Enlaces externos
 Wikimedia Commons alberga una categoría multimedia sobre Diagrama de Dynkin.
Wikimedia Commons alberga una categoría multimedia sobre Diagrama de Dynkin.- Klassifikation von Wurzelsystemen (Clasificación de sistemas raíz) (en alemán)
Notas
- En esta sección se hace referencia a la clase general como "diagramas de Coxeter" en lugar de "diagramas de Coxeter-Dynkin" para mayor claridad, ya que existe un gran potencial de confusión, haciendo a su vez el texto más conciso.
- Nótese que Stekloshchik usa una convención opuesta a la utilizada en este artículo.
Referencias
- Hall, 2015 Section 8.6
- Hall, 2015 Propositions 8.6 and 8.13
- Hall, 2015 Proposition 8.6
- Baez, John (13 de abril de 1998), This Week's Finds in Mathematical Physics (Week 119).
- (Fulton y Harris , 1991, Proposition D.40)
- Automorfismos externos de álgebras de Lie simples
- (Humphreys , 1972, Section 16.5)
- (Jacobson , 1971, section 7)
- Algebraic geometry and number theory: in honor of Vladimir Drinfeld's 50th Birthday, edited by Victor Ginzburg, p. 47, section 3.6: Cluster folding
- Folding by Automorphisms Archivado el 4 de marzo de 2016 en Wayback Machine., John Stembridge, 4pp., 79K, 20 August 2008, Other Articles by John Stembridge
- Véase (Stekolshchik, 2008, p. 102, remark 5.4) for illustrations of these foldings and references.
- Zuber, Jean-Bernard (1997). Generalized Dynkin diagrams and root systems and their folding. pp. 28-30. «10.1.1.54.3122 ».
- Transformations of Dynkin Diagrams, John Armstrong, March 5, 2010
- (Knapp , 2002, p. 758)
- Why are the Dynkin diagrams E6, E7 and E8 always drawn the way they are drawn?
- Notes on Coxeter Transformations and the McKay correspondence, Rafael Stekolshchik, 2005, Section 2.1 The Cartan matrix and its Tits form p. 27.
- Véase por ejemplo Reflection groups and Coxeter groups, por James E. Humphreys, p. 96
- Infinite dimensional Lie algebras, Victor Kac
- Carbone, L, Chung, S, Cobbs, C, McRae, R, Nandi, D, Naqvi, Y, and Penta, D: Classification of hyperbolic Dynkin diagrams, root lengths and Weyl group orbits, J. Phys. A: Math. Theor. 43 155209, 2010, arXiv:1003.0564
- The symmetry of M-theories, Francois Englert, Laurent Houart, Anne Taormina and Peter West, 2003
- Dynkin, E. B. (1947), «The structure of semi-simple algebras .», Uspekhi Mat. Nauk, N.S. (en ruso) 2 (4(20)): 59-127.
- Bourbaki, Nicolas (1968), «Chapters 4–6», Groupes et algebres de Lie, Paris: Hermann.
- Jacobson, Nathan (1 de junio de 1971), Exceptional Lie Algebras (1 edición), CRC Press, ISBN 978-0-8247-1326-3.
- Humphreys, James E. (1972), Introduction to Lie Algebras and Representation Theory, Birkhäuser, ISBN 978-0-387-90053-7.
- Fulton, William; Harris, Joe (1991). Representation theory. A first course. Graduate Texts in Mathematics, Readings in Mathematics (en inglés británico) 129. New York: Springer-Verlag. ISBN 978-0-387-97495-8. MR 1153249. OCLC 246650103. doi:10.1007/978-1-4612-0979-9.
- Dynkin, Evgeniĭ Borisovich; Alexander Adolph Yushkevich; Gary M. Seitz; A. L. Onishchik (2000), Selected papers of E.B. Dynkin with commentary, AMS Bookstore, ISBN 978-0-8218-1065-1.
- Hall, Brian C. (2015), Lie Groups, Lie Algebras, and Representations: An Elementary Introduction, Graduate Texts in Mathematics 222 (2nd edición), Springer, ISBN 978-3319134666.
- Knapp, Anthony W. (2002), Lie groups beyond an introduction (2nd edición), Birkhäuser, ISBN 978-0-8176-4259-4.
- Stekolshchik, R. (2008), Notes on Coxeter Transformations and the McKay Correspondence, Springer Monographs in Mathematics, ISBN 978-3-540-77398-6, arXiv:math/0510216, doi:10.1007/978-3-540-77399-3.
Enlaces externos
- John Baez sobre la ubicuidad de los diagramas de Dynkin en matemáticas
- Herramienta web para hacer diagramas Dynkin con etiquetas de calidad de publicación (escritas en JavaScript)
| Control de autoridades |
|
|---|
 Datos: Q5319218
Datos: Q5319218- Multimedia: Dynkin diagrams / Q5319218