Grupo fundamental
En topología, podemos asociar a cada punto p de un espacio topológico X un grupo que nos informa sobre la estructura 1-dimensional de la porción de espacio que rodea a este punto. Los elementos de este grupo, llamado grupo fundamental de X relativo al punto base p,[1] son clases de equivalencia de lazos (curvas cerradas) con origen en el punto p.

Existen generalizaciones a dimensión superior de este grupo, que reciben el nombre de grupos de homotopía. El grupo fundamental recibe también el nombre de primer grupo de homotopía. De ahí la forma común de notarlo como .

Intuición
Empezamos con un espacio (por ejemplo, una superficie), y algún punto en él, y todos los bucles que empiezan y terminan en este punto-trayectorias que empiezan en este punto, dan vueltas y finalmente vuelven al punto de partida. Dos bucles pueden combinarse de forma obvia: recorre el primer bucle y luego el segundo. Dos bucles se consideran equivalentes si uno puede deformarse en el otro sin romperse. El conjunto de todos los bucles de este tipo con este método de combinación y esta equivalencia entre ellos es el grupo fundamental para ese espacio concreto.
Historia
Henri Poincaré definió el grupo fundamental en 1895 en su artículo "Analysis situs".[2] El concepto surgió en la teoría de las superficies de Riemann, en los trabajos de Bernhard Riemann, Poincaré y Felix Klein. Describe las propiedades de monodromía de las funciones de valor complejo, además de proporcionar una completa clasificación topológica de las superficies cerradas.
Definiciones

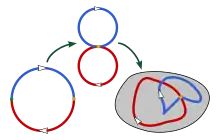
A lo largo de este artículo, es un espacio topológico. Un ejemplo típico es una superficie como la representada a la derecha. Además, es un punto en llamado punto base (como se explica más adelante, su papel es más bien auxiliar). La idea de la definición del grupo de homotopía es medir cuántas curvas (en sentido amplio) de pueden deformarse entre sí.


Lazo
Sea un espacio topológico, y un punto fijo de . Un lazo con base en es una aplicación continua que verifica .
![{\displaystyle \gamma :[0,1]\to X}](../I/bd7494ff58ac924ec9cc7240baef18445f317c14.svg)

El producto de dos lazos y basados en se denota y se define como:




Esto es, el lazo primero recorre el camino de , pero a "doble velocidad" y después el de , también a doble velocidad.
Desgraciadamente, este producto no dota de estructura de grupo al conjunto de todos los lazos con base en (es fácil comprobar que no es asociativo).
Para resolver este problema vamos a identificar dos lazos si uno puede ser "transformado de manera continua" en el otro mediante unas aplicaciones llamadas homotopías.
Homotopías
Una homotopía entre dos lazos con base en el mismo punto es una aplicación continua tal que:
![{\displaystyle \alpha ,\beta :[0,1]\to X}](../I/58ce3e4a0fc96092295d77ff486a788df4d04585.svg)
![{\displaystyle H:[0,1]\times [0,1]\to X}](../I/cb2d8af500c615e8cd4f406898a0a6a9f833402c.svg)
- .
- .
- .
- .




Si existe tal homotopía , se dice que y son homotópicas, y se denota .


Clases de homotopía
La relación de homotopía es una relación de equivalencia en el conjunto de los lazos con base en .
| Demostración |
|
Sean , y lazos con base en el mismo punto .
|









Por tanto, se pueden considerar las clases de equivalencia bajo la relación de homotopía, que denotamos como . Estas clases de equivalencia son lo que denotamos clases de homotopía. Intuitivamente una clase de homotopía representa un paquete de curvas que son deformables entre sí.
![{\displaystyle [\alpha ]}](../I/f53a93c296d4695d3466a11d6aa93650ebd86c3e.svg)
Asimismo, podemos considerar el conjunto de clases de equivalencia . Este conjunto (con la estructura de grupo que se describe a continuación) se denomina grupo fundamental del espacio topológico en el punto base .


Estructura de grupo
Según la definición anterior, es sólo un conjunto. Se convierte en un grupo (y por tanto merece el nombre de grupo fundamental) mediante el producto de lazos antes definido.
El producto de dos clases de homotopía y se define entonces como:
![{\displaystyle [\beta ]}](../I/4ed0d226c5c7425ae8c894ca0d83e1e433679f44.svg)
- .
![{\displaystyle [\alpha ]*[\beta ]=[\alpha *\beta ]}](../I/096b50a493af9ee9aec88e178311212d416b7853.svg)
Puede demostrarse que este producto es una operación bien definida sobre el conjunto (no depende de los representantes), e induce una estructura de grupo.
| Demostración |
|
Operación bien definida. Supongamos y , y veamos que . Definimos es continua por el lema del pegado.
Por tanto, es una homotopía entre y . |










Dependencia del punto base
Aunque el grupo fundamental en general depende de la elección del punto base, resulta que, salvo isomorfismo (en realidad, incluso salvo isomorfismo interno), esta elección no hace ninguna diferencia mientras el espacio sea arco conexo.
Por tanto, para los espacios arco conexos, muchos autores escriben en lugar de .

Propiedades
- Si el espacio es arco-conexo, los diferentes grupos y para dos puntos son isomorfos. Siendo posible hablar de el grupo fundamental del espacio: . Este isomorfismo no es natural en general.
- Una aplicación continua entre dos espacios topológicos induce una aplicación del conjunto de lazos de X sobre el de lazos de Y. Esta aplicación se induce también sobre las clases respectivas y se convierte en un homomorfismo entre los grupos fundamentales definido de este modo: .
- La asignación dada por que va de la categoría de espacios topológicos a la categoría de grupos es un functor.
- Este invariante puede ser calculado mediante la técnica de grafo de grupos conocida como el Teorema de Seifert-van Kampen. Con este resultado basta descomponer el espacio en 2 espacios más simples donde el grupo fundamental sea conocido.





![{\displaystyle f_{*}[\alpha ]=[f\circ \alpha ]}](../I/d9c3e3ddeb10fac111bdb6693331641d11d687b5.svg)

Grupo de bordes de un complejo simplicial
Cuando el espacio topológico es homeomorfo a un complejo simplicial, su grupo fundamental puede describirse explícitamente en términos de generadores y relaciones.
Si X es un conectado complejo simplicial, una arista-trayectoria en X se define como una cadena de vértices conectados por aristas en X. Se dice que dos caminos de aristas son equivalentes si uno puede obtenerse a partir del otro cambiando sucesivamente entre una arista y las dos aristas opuestas de un triángulo en X. Si v es un vértice fijo en X, una arista-bucle en v es una arista-ruta que empieza y termina en v. El grupo de caminos de aristas E(X, v) se define como el conjunto de clases de equivalencia de aristas de los bucles de aristas en v, con producto e inverso definidos por concatenación e inversión de bucles de aristas.
El grupo borde-trayectoria es naturalmente isomorfo a π1(|X |, v), el grupo fundamental del realización geométrica. |X | de X.[3] Puesto que sólo depende del 2-esqueleto X 2 de X (es decir, los vértices, aristas y triángulos de X), los grupos π1(|X |,v) y π1(|X 2|, v) son isomorfos.
El grupo borde-trayectoria puede describirse explícitamente en términos de generadores y relaciones. Si T es un árbol de expansión máxima en el 1-esqueleto de X, entonces E(X, v) es canónicamente isomorfo al grupo con generadores (las trayectorias-borde orientadas de X que no ocurren en T) y relaciones (las equivalencias-borde correspondientes a triángulos en X). Un resultado similar es válido si T se sustituye por cualquier simplemente conectado—en particular contractible—subcomplejo de X. Esto a menudo da una forma práctica de calcular los grupos fundamentales y se puede utilizar para demostrar que cada grupo finitamente presentado surge como el grupo fundamental de un complejo simplicial finito. También es uno de los métodos clásicos utilizados para superficies topológicas, que se clasifican por sus grupos fundamentales.
El espacio de cobertura universal de un complejo simplicial finito conectado X también puede describirse directamente como un complejo simplicial utilizando caminos de aristas. Sus vértices son pares (w,γ) donde w es un vértice de X y γ es una clase de equivalencia de aristas de caminos de v a w. Los k-símplices que contienen (w,γ) corresponden naturalmente a los k-símplices que contienen w. Cada nuevo vértice u del k-simplex da una arista wu y por tanto, por concatenación, un nuevo camino γu de v a u. Los puntos (w,γ) y (u, γu) son los vértices del simplex "transportado" en el espacio de cobertura universal. El grupo borde-ruta actúa naturalmente por concatenación, preservando la estructura simplicial, y el espacio cociente es simplemente X.
Es bien sabido que este método también puede utilizarse para calcular el grupo fundamental de un espacio topológico arbitrario. Esto lo sabían sin duda Eduard Čech y Jean Leray y apareció explícitamente como observación en un artículo de André Weil;[4] varios otros autores como Lorenzo Calabi, Wu Wen-tsün, y Nodar Berikashvili también han publicado pruebas. En el caso más simple de un espacio compacto X con un recubrimiento abierto finito en el que todos los no vacío finitos intersecciones de conjuntos abiertos en el recubrimiento son contractibles, el grupo fundamental puede identificarse con el grupo de aristas del complejo simplicial correspondiente al nervio del recubrimiento.
Ejemplos
- En muchos espacios sólo existe una clase de homotopía de lazos, y en consecuencia, el grupo fundamental es trivial. Un espacio topológico con grupo fundamental trivial se dice simplemente conexo. Rn, o cualquier subconjunto convexo de Rn lo son. La esfera de dimensión n con n mayor o igual que 2 también lo es.
- El espacio topológico más simple no simplemente conexo es la circunferencia: su grupo fundamental es isomorfo al grupo aditivo de los números enteros Z. El número entero asociado a cada lazo de es el número de vueltas que ese lazo da en torno a ella.

- Si X e Y son dos espacios topológicos arcoconexos, el grupo fundamental del producto X x Y es isomorfo al producto de los grupos de ambos espacios. Por ejemplo, si para la circunferencia, . Para el toro, homeomorfo a un producto de circunferencias,.


- El grupo fundamental no tiene por qué ser conmutativo. Por ejemplo, el grupo fundamental del plano privado de dos puntos es isomorfo al grupo libre con dos generadores . Estos dos generadores son las clases de los lazos que pasando por un punto p rodean a cada uno de los puntos eliminados. En algunas clases particulares de espacios topológicos, como por ejemplo en la de los grupos topológicos, el grupo fundamental sí resulta ser siempre abeliano.


Notas y referencias
- Munkres: "Topología" ISBN 978-84-205-3180-9, printed in spain
- Poincaré, Henri (1895). «Analysis situs». Journal de l'École Polytechnique. (2) (en francés) 1: 1-123. Traducción al inglés en Poincaré, Henri (2009). «Analysis situs». Papers on Topology: Analysis Situs and Its Five Supplements. Traducido po John Stillwell. pp. 18-99.
- Singer, Isadore; Thorpe, John A. (1967). Notas de clase sobre topología y geometría elementales. Springer-Verlag. p. org/details/lecturenotesonel00sing_949/page/n101 98. ISBN 0-387-90202-3.
- André Weil, On discrete subgroups of Lie groups, Annals of Mathematics 72 (1960), 369-384.
Bibliografía
- Masey, W.S. A basic course in algebraic topology. GTM 127. Springer-Verlag. ISBN 0-387-97430-X
- Munkres, J., Topology, Prentice Hall (2000) ISBN 0131816292
Bibliografía adicional
- Adams, John Frank (1978), Infinite loop spaces, Annals of Mathematics Studies (en inglés) 90, Princeton University Press, ISBN 978-0-691-08207-3, MR 505692, (requiere registro).
- Brown, Ronald (2006), Topology and Groupoids, Booksurge, ISBN 1-4196-2722-8.
- Bump, Daniel (2013), Lie Groups, Graduate Texts in Mathematics 225 (2nd edición), Springer, ISBN 978-1-4614-8023-5, doi:10.1007/978-1-4614-8024-2.
- Crowell, Richard H.; Fox, Ralph (1963), Introduction to Knot Theory, Springer.
- El Zein, Fouad; Suciu, Alexander I.; Tosun, Meral; Uludağ, Muhammed; Yuzvinsky, Sergey (2010), Arrangements, Local Systems and Singularities: CIMPA Summer School, Galatasaray University, Istanbul, 2007, ISBN 978-3-0346-0208-2.
- Forster, Otto (1981), Lectures on Riemann Surfaces, ISBN 0-387-90617-7.
- Fulton, William (1995), Algebraic Topology: A First Course, Springer, ISBN 9780387943275, (requiere registro).
- Goerss, Paul G.; Jardine, John F. (1999), Simplicial Homotopy Theory, Progress in Mathematics 174, Basel, Boston, Berlin: Birkhäuser, ISBN 978-3-7643-6064-1.
- Grothendieck, Alexandre; Raynaud, Michèle (2003, primera edicion 1971), Séminaire de Géométrie Algébrique du Bois Marie - 1960-61 - Revêtements étales et groupe fondamental - (SGA 1) (Documents Mathématiques 3), Paris: Société Mathématique de France, pp. xviii+327, see Exp. V, IX, X, ISBN 978-2-85629-141-2, arXiv:math.AG/0206203.
- Hall, Brian C. (2015), Lie Groups, Lie Algebras, and Representations: An Elementary Introduction, Graduate Texts in Mathematics 222 (2nd edición), Springer, ISBN 978-3319134666.
- Hatcher, Allen (2002), Algebraic Topology, Cambridge University Press, ISBN 0-521-79540-0.
- Peter Hilton y Shaun Wylie, Homology Theory, Cambridge University Press (1967) [warning: these authors use contrahomology for cohomology]
- Humphreys, James E. (2004), Linear Algebraic Groups, Graduate Texts in Mathematics (21), Springer, ISBN 9780387901084.
- Humphreys, James E. (1972), Introduction to Lie Algebras and Representation Theory, ISBN 0-387-90052-7.
- Maunder, C. R. F. (January 1996), Algebraic Topology, Dover Publications, ISBN 0-486-69131-4.
- May, J. Peter (1999), A Concise Course in Algebraic Topology, ISBN 9780226511832.
- Deane Montgomery and Leo Zippin, Topological Transformation Groups, Interscience Publishers (1955)
- Rotman, Joseph (22 de julio de 1998), An Introduction to Algebraic Topology, Springer-Verlag, ISBN 0-387-96678-1, (requiere registro).
- Rubei, Elena (2014), Algebraic Geometry, a concise dictionary, Berlin/Boston: Walter De Gruyter, ISBN 978-3-11-031622-3.
- Seifert, Herbert; Threlfall, William; Heil (traductor), Wolfgang (1980), A Textbook of Topology, Academic Press, ISBN 0-12-634850-2, (requiere registro).
- Singer, Isadore. M.; Thorpe, J. A. (10 de diciembre de 1976), Lecture Notes on Elementary Topology and Geometry, ISBN 0-387-90202-3.
- Spanier, Edwin H. (1989), Algebraic Topology, Springer, ISBN 0-387-94426-5.
- Strom, Jeffrey (2011), Modern Classical Homotopy Theory, AMS, ISBN 9780821852866.
Enlaces externos
 Wikimedia Commons alberga una categoría multimedia sobre Grupo fundamental.
Wikimedia Commons alberga una categoría multimedia sobre Grupo fundamental.- Weisstein, Eric W. «Fundamental group». En Weisstein, Eric W, ed. MathWorld (en inglés). Wolfram Research.
- Dylan G.L. Allegretti, Simplicial Sets and van Kampen's Theorem: Una discusión sobre el grupo fundamental de un espacio topológico y el grupo fundamental de un conjunto simplicial (en inglés)
- Animaciones para introducir el grupo fundamental por Nicolas Delanoue (en inglés)
- Conjuntos de puntos base y groupoides fundamentales: discusión en mathoverflow (en inglés)
- Groupoides en matemáticas (en inglés)
| Control de autoridades |
|
|---|
 Datos: Q662830
Datos: Q662830- Multimedia: Fundamental group / Q662830