Notación axial-angular
En matemáticas, la notación axial-angular de una rotación parametriza una rotación en el espacio euclídeo tridimensional mediante dos elementos: un vector unitario e que indica la dirección de un eje de rotación, y un ángulo θ que describe la magnitud de la rotación respecto al eje. Solo se necesitan dos números, no tres, para definir la dirección de un vector unitario e ubicado en el origen, porque e tiene necesariamente módulo 1, y expresadas dos coordenadas, se puede deducir la tercera (dado que , y por lo tanto, ). También es posible utilizar los dos ángulos que definen la elevación y el azimut de e, suficientes para ubicarlo en cualquier marco de coordenadas cartesianas en particular.


De acuerdo con la fórmula de rotación de Rodrigues, el ángulo y el eje determinan una transformación que determina el giro de vectores tridimensionales. La rotación se produce en el sentido prefijado por la regla de la mano derecha. El eje de rotación a veces se denomina eje de Euler.
Es una de las muchas formalizaciones de la rotación en tres dimensiones. La notación axial-angular se basa en el Teorema de rotación de Euler, que asegura que cualquier rotación o secuencia de rotaciones de un cuerpo rígido en un espacio tridimensional es equivalente a una rotación pura sobre un solo eje fijo.
Vector de rotación
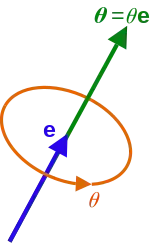
La notación axial-angular es equivalente al más conciso vector de rotación, también llamado vector de Euler. En este caso, tanto el eje de rotación como el ángulo están representados por un vector codireccional con el eje de rotación cuyo módulo (longitud) coincide con el ángulo de rotación θ,

Se utiliza en las aplicaciones exponenciales y logarítmicas, que involucran este tipo de notación.
Debe tenerse en cuenta que distintos vectores de rotación corresponden a la misma rotación. En particular, un vector de rotación de longitud θ + 2πM, para cualquier entero M, codifica exactamente la misma rotación que un vector de rotación de longitud θ. Por lo tanto, existe una infinidad numerable de vectores de rotación correspondientes a una rotación cualquiera dada. Además, todas las rotaciones de valor 2πM son iguales a una rotación nula, por lo que, para un entero M dado, todos los vectores de rotación de longitud 2πM, en todas las direcciones, constituyen una infinidad numerable de vectores de rotación de dos parámetros, que codifican la misma rotación que el vector cero. Estos hechos deben tenerse en cuenta al invertir la aplicación exponencial, es decir, al encontrar un vector de rotación que corresponda a una matriz de rotación dada. En consecuencia, la aplicación exponencial es sobreyectiva, no biyectiva.
Ejemplo
Un observador está situado sobre el suelo, y elige la dirección z negativa para representar la dirección de la gravedad. Si gira 90° a la izquierda, rotará π2 radianes con respecto al eje z. Viendo la notación axial-angular como un par ordenado, este giro queda representado por

El ejemplo anterior se puede representar como un vector de rotación con una magnitud de π2 apuntando en la dirección z,

Uso
La notación axial-angular es conveniente cuando se trata de mecánica del sólido rígido. Es útil tanto para caracterizar movimientos de rotación, como para abordar el estudio del movimiento del sólido rígido mediante transformaciones homogéneas y giros.
Cuando un cuerpo rígido gira alrededor de un eje fijo, sus datos axiales-angulares son una constante y el ángulo de rotación depende continuamente del tiempo.
La conexión entre los tres valores propios 1 y e±iθ y sus tres ejes ortogonales asociados en una representación cartesiana según el teorema de Mercer, es una construcción conveniente de la expresión cartesiana de la matriz de rotación en tres dimensiones.
Rotación de un vector
La fórmula de rotación de Rodrigues, llamada así por Olinde Rodrigues, es un algoritmo eficiente para rotar un vector en un espacio euclídeo dado un eje y un ángulo de rotación. En otras palabras, proporciona un algoritmo para calcular la aplicación exponencial de (3) a SO(3) sin calcular la matriz exponencial completa.

Si v es un vector en ℝ3 y e es un vector unitario definido en el origen que describe un eje de rotación sobre el que v se gira con un ángulo θ, la fórmula de rotación de Rodrigues para obtener el vector girado es

Para la rotación de un solo vector puede ser más eficiente que convertir e y θ en una matriz de rotación para rotar el vector.
Relación con otras notaciones
Hay varias formas de representar una rotación. Es útil comprender cómo se relacionan las diferentes notaciones entre sí, y cómo convertirlas entre ellas. Aquí el vector unitario se denota ω en lugar de e.
Aplicación exponencial de (3) a SO(3)
La aplicación exponencial efectúa una transformación de la notación axial-angular de las rotaciones a matrices de rotación,

Esencialmente, al usar una serie de Taylor, se deduce una relación de forma cerrada entre estas dos notaciones. Dado un vector unidad ω ∈ (3) = ℝ3 que representa el eje de rotación unitario y un ángulo, θ ∈ ℝ, se da una matriz de rotación equivalente R como sigue, donde K es el producto vectorial de ω, es decir, Kv = ω × v para todos los vectores v ∈ ℝ3,

Como K es asimétrico y la suma de los cuadrados de sus entradas diagonales superiores es 1, el polinomio característico de P(t) de K es P(t) = det(K − tI) = −(t3 + t). Dado que, por el teorema de Cayley-Hamilton, P(K) = 0, esto implica que

Como resultado, K4 = –K2, K5 = K, K6 = K2, K7 = –K.
Este patrón cíclico continúa indefinidamente, por lo que todas las potencias superiores de K se pueden expresar en términos de K y K2. Así, de la ecuación anterior, se deduce que

es decir,

Esta es una deducción del álgebra de Lie, en contraste con el concepto geométrico que conduce a la fórmula de rotación de Rodrigues.[1]
Debido a la existencia de la aplicación exponencial mencionada anteriormente, el vector unitario ω que representa el eje de rotación y el ángulo θ, a veces se denominan coordenadas exponenciales de la matriz de rotación R.
Aplicación logarítmica de SO(3) sobre (3)
Sea K, que denota la matriz 3 × 3 definida para efectuar el producto cruzado con el eje de rotación ω: K(v) = ω × v para todos los vectores v.
Para recuperar la notación axial-angular a partir de una matriz de rotación, se debe calcular la traza de la matriz de rotación

y luego calcular el eje normalizado,

Téngase en cuenta también que el logaritmo de la matriz de rotación R es

Se produce una excepción cuando R tiene un autovalor igual a Plantilla:Num. En este caso, el registro no es único. Sin embargo, incluso en el caso donde θ = Π, la norma matricial del logaritmo es

Dadas las matrices de rotación A y B,

es la distancia geodésica en la variedad 3D de matrices de rotación.
Para pequeñas rotaciones, el cálculo anterior de θ puede ser numéricamente impreciso, ya que la derivada de la función (arc cos) tiende a infinito cuando θ → 0. En ese caso, los términos fuera del eje proporcionarán una mejor información sobre θ ya que, para ángulos pequeños, R ≈ I + θK (esto se debe a que estos son los dos primeros términos de la serie de Taylor para exp(θK)).
Esta formulación también tiene problemas numéricos en θ = π, donde los términos fuera del eje no proporcionan información sobre el eje de rotación (que todavía se define hasta una ambigüedad de signo). En ese caso, se debe reconsiderar la fórmula anterior.

En θ = π, tenemos

y así se llega a

y por lo tanto, los términos diagonales de B son los cuadrados de los elementos de ω y los signos (hasta la ambigüedad de signos) se pueden determinar a partir de los signos de los términos fuera del eje de B.
Cuaterniones unitarios
La siguiente expresión transforma las coordenadas de la expresión axial-angular a versores (cuaterniones):

Dado un versor q = s + x representado mediante su escalar s y el vector x, las coordenadas axiales-angulares se pueden extraer utilizando el procedimiento siguiente:
![{\displaystyle {\begin{aligned}\theta &=2\arccos s\\[8px]{\boldsymbol {\omega }}&={\begin{cases}{\dfrac {x}{\operatorname {sen} {\tfrac {\theta }{2}}}},&{\text{si }}\theta \neq 0\\0,&{\text{en caso contrario}}.\end{cases}}\end{aligned}}}](../I/8a4c88685171659d4b41357838c5a77d923f56ee.svg)
Una expresión más estable numéricamente del ángulo de rotación utiliza la función arcotangente de dos parámetros:

donde | x | es la norma vectorial del 3-vector x.
Véase también
- Coordenadas homogéneas
- Teoría del tornillo, notación de movimientos y velocidades del sólido rígido utilizando los conceptos de giro, tornillo y llave
Referencias
- Esto es válido para la notación en forma de triplete del grupo de rotación, es decir, para el giro 1. Para notaciones/giros de dimensiones superiores, consúltese Curtright, T. L.; Fairlie, D. B.; Zachos, C. K. (2014). «A compact formula for rotations as spin matrix polynomials». SIGMA 10: 084. arXiv:1402.3541. doi:10.3842/SIGMA.2014.084.
| Control de autoridades |
|
|---|
 Datos: Q3625416
Datos: Q3625416