Oscillation (mathématiques)
L'oscillation quantifie la tendance d'une fonction ou d'une suite à varier entre des valeurs extrémales. Il existe plusieurs notions d'oscillation : oscillation d'une suite de réels, oscillation d'une fonction à valeurs dans un espace métrique (comme ℝ), en un point ou sur une partie de son domaine de définition.
Cet article concerne l'oscillation en mathématiques. Pour l'oscillation en physique, voir Oscillation.
Définitions
Oscillation d'une suite réelle
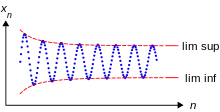
L'oscillation ω(a) d'une suite réelle a = (an)n est la différence entre ses limites supérieure et inférieure :

Elle est définie sauf si cette différence est de la forme (+∞) – (+∞) ou (–∞) – (–∞), c'est-à-dire si la suite tend vers +∞ ou vers –∞. Elle vaut +∞ lorsque la suite n'est pas bornée. Elle est nulle lorsque la suite converge.
Oscillation d'une fonction sur une partie
Si f est une fonction à valeurs réelles définie sur un ensemble X, l'oscillation ωf(U) de f sur une partie non vide U de X est la différence entre les bornes supérieure et inférieure de f sur U :

Plus généralement, si f est à valeurs dans un ensemble E muni d'une distance d, ωf(U) est le diamètre de l'image de U par f :

Elle est toujours définie, et vaut +∞ lorsque la fonction n'est pas bornée sur U.
Oscillation d'une fonction en un point
Lorsque le domaine X de f est muni d'une topologie, on définit l'oscillation ωf(a) de f en un point quelconque a de X comme la borne inférieure de ses oscillations ωf(U) quand U parcourt le filtre V(a) des voisinages de a, ou même seulement une base W(a) de V(a) :

Si de plus f est à valeurs réelles, cette oscillation est la différence entre limites supérieure et inférieure de f en a :

On peut toujours choisir pour W(a) l'ensemble des ouverts qui contiennent a. Si l'espace topologique X est métrisable, on peut aussi choisir comme base la famille des boules (ouvertes par exemple) B(a, ε) de centre a et de rayon ε > 0 et vérifier que

ce qui, si l'espace métrisable X est un ensemble de réels (muni de la distance usuelle), se réécrit :

L'oscillation de f en un point a de son domaine est nulle si et seulement si f est continue en a[1].
De plus, toutes les égalités ci-dessus s'étendent au cas où f n'est définie que sur une partie Y de X à laquelle a est seulement adhérent, en remplaçant le filtre V(a) des voisinages de a par celui, VY(a), de leurs intersections avec Y. L'oscillation de f en a est nulle si et seulement si le filtre image, f(VY(a)), est de Cauchy. Lorsque l'espace métrique d'arrivée E est complet, cela équivaut, à nouveau, à l'existence d'une limite en a pour f.
Lorsque X est métrisable et E complet, si f est continue sur le sous-espace Y, elle s'étend continûment au Gδ des points adhérents à Y en lesquels l'oscillation de f est nulle[2].
La notion d'oscillation en un point adhérent généralise aussi celle d'oscillation d'une suite dans ℝ à toute suite dans E, vue comme fonction sur l'espace discret Y = ℕ, en considérant a = +∞, adhérent à ℕ dans son compactifié d'Alexandrov X = ℕ∪{+∞}.
Exemples
- Les seules suites périodiques d'oscillation nulle sont les suites constantes.
- L'oscillation de la suite an = (–1)n vaut 2.
- L'oscillation de la fonction x ↦ 1/x est infinie en 0 et nulle en tout autre élément de ℝ.
- Celle de la fonction sinus vaut 2 en ±∞, et 0 ailleurs.
- Celle de x ↦ sin(1/x) vaut 2 en 0, et 0 ailleurs.
Discontinuités
L'application a ↦ ωf(a) permet de quantifier les discontinuités de f et de les classer.
Elle est en outre semi-continue supérieurement, donc l'ensemble Δ(f) des points de discontinuité de f est un Fσ, comme réunion des fermés Δn(f) = {a ∈ X | ωf(a) ≥ 1/n}. Par passage au complémentaire, l'ensemble des points de continuité de f est un Gδ, intersection dénombrable des ouverts {a ∈ X | ωf(a) , 1/n}.
Cela fournit aussi une preuve très rapide de l'une des deux directions du critère de Lebesgue pour l'intégrabilité de Riemann[3], à savoir : si Δ(f) n'est pas Lebesgue-négligeable, alors f n'est pas Riemann-intégrable, puisque I+(f) – I–(f) ≥ λ(Δn(f))/n.
Notes et références
- (en) William F. Trench, Introduction to Real Analysis, (1re éd. 2003, Prentice Hall/Pearson Education), 574 p. (ISBN 978-0-13-045786-8, lire en ligne), p. 172, Theorem 3.5.2.
- (en) Stephen Willard, General Topology, Dover, (1re éd. 1970) (lire en ligne), p. 177.
- Trench 2010, p. 171-177, § 3.5 : « A More Advanced Look at the Existence of the Proper Riemann Integral ».
- (en) Edwin Hewitt et Karl Stromberg, Real and Abstract Analysis, Springer, , p. 78
- (en) John C. Oxtoby, Measure and Category, Springer, coll. « GTM » (no 2), , 4e éd., 124 p. (ISBN 978-0-387-90508-2), p. 31–35
- (en) C. C. Pugh (de), Real Mathematical Analysis, Springer, , 440 p. (ISBN 978-0-387-95297-0, lire en ligne), p. 164-165
- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « Oscillation (mathematics) » (voir la liste des auteurs).
Articles connexes
- Continuité de Cauchy
- Fonction à variation bornée
- Module de continuité
- Fonction à oscillation moyenne bornée
- Série de Grandi
- Théorème de Froda
 Portail de l'analyse
Portail de l'analyse