Surveyor 3
Surveyor 3 est la deuxième sonde lunaire américaine du programme Surveyor de la NASA à réaliser un atterrissage lunaire en douceur. Lancée le , elle se pose sur la Lune le , sur la partie Mare Cognitum de l'océan des Tempêtes (Oceanus Procellarum) et transmet un total de 6 326 images.
Sonde spatiale ( Lune )
par les astronautes de la mission Apollo 12
| Organisation |
|
|---|---|
| Constructeur |
|
| Programme | Surveyor |
| Domaine | Exploration de la Lune |
| Type de mission | Atterrisseur |
| Statut | Mission terminée |
| Autres noms | Surveyor-C |
| Base de lancement | Cape Kennedy, LC-36B |
| Lancement |
17 avril 1967 à 07 h 05 min 01 s TU |
| Lanceur |
Atlas-Centaur (AC-12) (Atlas-D # 292 / Centaur D) |
| Fin de mission | 4 mai 1967 |
| Durée | 65 heures |
| Durée de vie | 45 jours (mission primaire) |
| Identifiant COSPAR | 1967-035A |
| Protection planétaire | Catégorie II[1] |
| Masse au lancement |
1 096 kg au décollage 296 kg à l'atterrissage |
|---|---|
| Propulsion | Chimique |
| Ergols | Hydrate d'hydrazine |
| Contrôle d'attitude | Stabilisé sur 3 axes |
| Source d'énergie | Panneaux solaires |
| Puissance électrique | 85 watts |
| Orbite | Descente directe |
|---|---|
| Atterrissage | 20 avril 1967 à 04 h 53 TU |
| Localisation | 3,0163° S et 336,582° E |
| Television Camera | Transmission de gros plans de la surface lunaire |
|---|---|
| Soil Mechanics Surface Sampler | Échantillonneur de sol lunaire |
Elle présente la particularité d'avoir été visitée deux ans et demi plus tard par les astronautes de la mission Apollo 12.
Objectifs de la mission
Les principaux objectifs du programme Surveyor, une série de sept vols robotiques d'atterrissage lunaire en douceur, sont de soutenir les atterrissages habités à venir du programme Apollo en : 1° développant et validant la technologie d'atterrissage en douceur sur la Lune ; 2° fournir des données sur la compatibilité de la conception du programme Apollo avec les conditions rencontrées sur le sol lunaire ; et 3° enrichir les connaissances scientifiques de la Lune.
Les objectifs spécifiques de cette mission sont les suivants : 1° effectuer un atterrissage en douceur sur la Lune dans la zone d'atterrissage Apollo et à l'est du site d'atterrissage de Surveyor 1 ; 2° obtenir des images télévisées du sol lunaire après son atterrissage ; 3° obtenir des informations sur la force portante de la surface lunaire, la réflectivité radar et les propriétés thermiques du sol lunaire ; et 4° utiliser l'échantillonneur de surface pour manipuler la surface lunaire et observer les effets avec la caméra de télévision.
Description du véhicule spatial
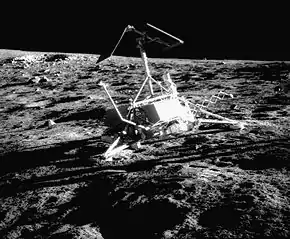
Contrairement aux atterrisseurs soviétiques Luna, Surveyor est un véritable atterrisseur, comprenant un véhicule de trois mètres de haut basé sur une structure triangulaire en aluminium à paroi mince de 27 kg avec une des trois jambes à chaque coin et un gros moteur à rétrofusée à propergol solide au centre (qui représente plus de 60% de la masse globale de la sonde lunaire). La sonde spatiale est équipé d'un système de détection de vitesse Doppler qui alimente en informations l'ordinateur du véhicule spatial pour mettre en œuvre une descente contrôlée vers la surface lunaire. Chacun des trois pieds de la sonde comporte également des amortisseurs de type avion et des jauges de contrainte pour fournir des données sur les caractéristiques d'atterrissage, importantes pour les futures missions Apollo.
La structure de base de la sonde spatiale Surveyor se compose d'un trépied de tubes en aluminium à paroi mince et d'entretoises fournissant des surfaces de montage pour les systèmes d'alimentation, de communications, de propulsion, de commande de vol et de charge utile. Un mât central s'étend à environ un mètre au-dessus du sommet du trépied. Trois jambes d'atterrissage articulées sont fixées aux bas de la structure. Les jambes en aluminium ont des amortisseurs et le mécanisme de verrouillage se termine par trois pieds avec amortisseurs. Les trois pieds s'étendent à 4,3 mètres du centre de la sonde Surveyor. Le véhicule spatial mesure 3 mètres de haut. Les jambes sont repliées pour s'insérer dans la coiffe au lancement.
Une surface de 0,855 m2 de 792 cellules photovoltaïques est montée au-dessus du mât et génère jusqu'à 85 watts de puissance emmagasinée dans un accumulateur argent-zinc. Les communications sont réalisées via une antenne mobile à gain élevé montée près du haut du mât central pour transmettre des images de télévision, deux antennes omnidirectionnelles montées aux extrémités du mât pour les liaisons montante et descendante, ainsi que deux récepteurs et deux émetteurs.
Le contrôle thermique est obtenu par une combinaison de peinture blanche, de finition thermique à haute émittance infrarouge et de dessous en aluminium poli. Deux compartiments à contrôle thermique, équipés de couvertures super-isolantes, d'interrupteurs thermiques et de petits radiateurs électriques, sont montés sur la structure de la sonde spatiale. Un compartiment, maintenu entre 5 et 50 °C, abrite les communications et l'électronique pour l'alimentation. L'autre, tenue entre −20 et 50 °C, abrite les composants de commande et de traitement du signal.
La caméra de télévision est montée près du sommet du trépied et des jauges de contrainte, des capteurs de température et d'autres instruments d'ingénierie sont intégrés dans toute la sonde spatiale. Une cible photométrique est montée près de l'extrémité d'une des jambes d'atterrissage et une sur une courte perche s'étendant au bas de la structure. D'autres ensembles de charges utiles, qui diffèrent d'une mission à l'autre, sont montés sur différentes parties de la structure dépendant de leur fonction.
Un capteur solaire, un viseur de l'étoile Canopus et des gyroscopes sur trois axes fournissent une connaissance de l'attitude. La propulsion et le contrôle d'attitude sont assurés par des jets d'azote gazeux froid durant les phases de la trajectoire, trois moteurs-fusées à vernier durant les phases propulsées, y compris l'atterrissage, et le moteur à propergol solide durant la descente finale. La rétrofusée est un boîtier sphérique en acier monté au centre inférieur de la sonde spatiale.
Les moteurs verniers utilisent du carburant hydrate d'hydrazine et un oxydant MON-10 (90% N2O2, 10% NO). Chaque chambre peut produire 130 N à 460 N de poussée sur commande, un moteur peut pivoter pour contrôler le roulis. Le carburant est emmagasiné dans des réservoirs sphériques montés sur la structure du trépied. Pour la séquence d'atterrissage, un radar d'altitude déclenche la mise à feu de la rétrofusée principale pour le freinage primaire. Une fois l'allumage terminé, la rétrofusée et le radar sont largués et les radars doppler et altimètre sont activés. Ceux-ci fournissent des informations au pilote automatique qui contrôle le système de propulsion vernier à l'atterrissage.
Surveyor 3 est de conception similaire aux Surveyor 1 et Surveyor 2, mais présente plusieurs changements dans sa charge utile. Il transporte une caméra de télévision, des expériences de mécanique des sols et des appareils pour mesurer la température et la réflectivité radar comme lors des missions précédentes, mais la caméra de télévision a un capot anti-éblouissement. Un échantillonneur de surface, composé d'une pelle de 12 cm de long par 5 cm de large montée sur un bras pantographe de 1,5 mètre, remplace la caméra de télévision d'approche. Deux miroirs auxiliaires plats sont fixés à la structure pour fournir à la caméra une vue du sol lunaire sous les moteurs et de l'un des 3 pieds. La sonde Surveyor 3 a une masse de 1 026 kg au lancement et 296,0 kg à l'atterrissage.
Description des instruments
Caméra de télévision

La caméra de télévision consiste en un tube Vidicon, de deux objectifs de 25 mm et 100 mm de focale, d'obturateurs, de filtres et de diaphragmes montés sur un axe incliné d'environ 16° par rapport à l'axe central de la sonde spatiale. La caméra est montée sous un miroir qui peut être déplacé en azimut et en élévation. Le fonctionnement de la caméra dépend totalement de la réception des commandes de la Terre. La couverture image par image du sol lunaire est obtenue sur 360° en azimut et de 40° au-dessus du plan perpendiculaire à l'axe de la caméra et jusqu'à 65° en dessous de ce plan.
Les deux modes de fonctionnement sont de 200 lignes et de 600 lignes. Le mode 200 lignes est transmis par une antenne omnidirectionnelle et numérise une image toutes les 61,8 secondes. La transmission vidéo complète de chaque image de 200 lignes nécessite 20 secondes et une bande passante de 1,2 kHz.
Les images de 600 lignes sont transmises par une antenne directionnelle, ces images sont analysées toutes les 3,6 secondes. Chaque image de 600 lignes nécessite nominalement 1 seconde pour être lue à partir du Vidicon et nécessite une bande passante de 220 kHz pour la transmission. Les transmissions de données sont converties en un signal de télévision standard. Les images de télévision sont affichées sur Terre sur un écran à balayage lent avec un phosphore à longue rémanence. La rémanence est choisie pour correspondre à la valeur nominale maximale de la vitesse de balayage. Une image de télévision d'identification est reçue pour chaque nouvelle image et est affichée en temps réel à un rythme compatible avec la vitesse d'arrivée de la nouvelle image. Ces données sont enregistrées sur un magnétoscope vidéo. La caméra envoie 6 326 photographies entre le et le , y compris des vues de la sonde lunaire, du sol lunaire, des échantillons lunaires destinés à l'étude de la mécanique des sols et de la Terre durant une éclipse solaire.
Échantillonneur de surface pour la mécanique du sol lunaire
L'échantillonneur de surface de mécanique des sols est conçu pour creuser, gratter et creuser des tranchées à la surface lunaire et pour transporter des matériaux de surface tout en étant photographié afin que les propriétés de la surface puissent être déterminées. L'échantillonneur est monté sous la caméra de télévision et consiste principalement en une pelle d'environ 12 cm de long et 5 cm de large. La pelle se compose d'un récipient, d'une lame affûtée et d'un moteur électrique pour ouvrir et fermer le récipient. Une petite semelle est attachée à la porte de la pelle pour présenter une surface plane à la surface lunaire. La pelle est capable de contenir une quantité maximale d'environ 3,2 cm de diamètre de matériau lunaire solide et un maximum de 100 cm3 de matériau granulaire. La pelle est monté sur un bras de pantographe qui peut être étendu à environ 1,5 m ou rétracté à proximité du moteur de la sonde spatiale. Le bras peut être déplacé d'un azimut de +40° à -72° ou être élevé de 13 cm par un moteur. Il peut être projeté sur la surface lunaire par la force fournie par la gravité et un ressort.
L'échantillonneur de surface effectue sept essais de portance, quatre essais de tranchée et treize essais d'impact. La durée totale de fonctionnement est de 18 h 22 min à 10 reprises distinctes. Les mesures des courants moteurs et des forces appliquées à la surface ne sont pas obtenues en raison de l'état de la télémétrie[Laquelle ?] de la sonde spatiale après l'atterrissage sur le sol lunaire. Toutefois, des estimations sont possibles. Le petit coefficient d'élasticité du ressort ne permet pas la détermination de la densité des essais d'impact. Une pénétration de 3,8 à 5 cm est obtenue à partir des essais de roulement, et une profondeur de 17,5 cm est atteinte durant les opérations de creusement de tranchées. La conception du mécanisme et de son auxiliaire électronique est plus que suffisante pour les opérations à la surface lunaire.
Déroulement de la mission
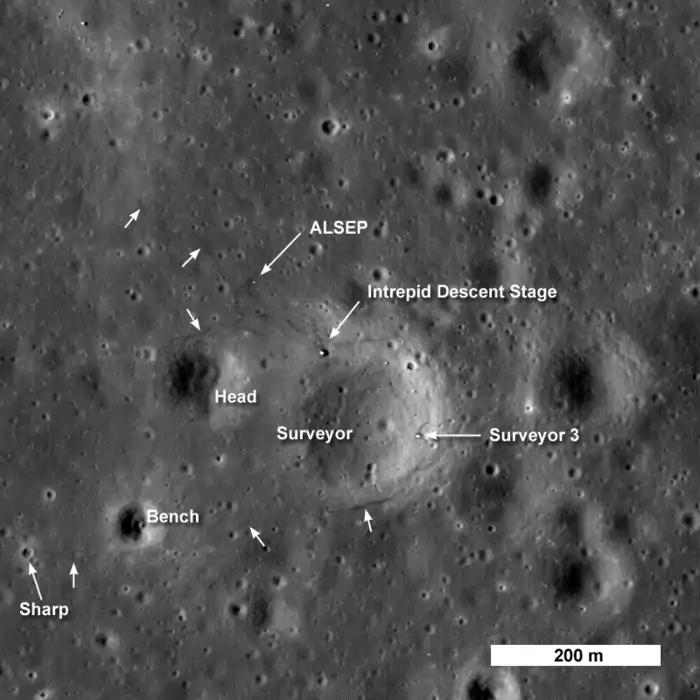
ainsi que l'étage de descente du module lunaire Apollo 12 qui s'est posé en novembre 1969 (au centre).
On aperçoit également différents équipements laissés par les astronautes ainsi que les empreintes de leurs pas.
La sonde lunaire Surveyor 3 est lancée le à 07 h 05 min 01 s TU par le lanceur Atlas-Centaur (AC-12) de l'aire de lancement LC-36B de la base de lancement de Cap Kennedy. Après sa séparation du lanceur Atlas, l'étage supérieur Centaur est mis à feu qui dure durant environ 5 minutes, plaçant le véhicule spatial sur une orbite d'attente de 167 km. L'étage Centaur est redémarrée 22 min 09 s plus tard, injectant la sonde lunaire sur une trajectoire vers la Lune. Une correction de trajectoire a lieu 21,9 heures après le décollage et dirige Surveyor 3 vers le point d'atterrissage sélectionné. Le à 00 h 01 min 06 s TU, à 76 km d'altitude et se déplaçant à 2 626 m/s, le moteur vernier et la rétrofusée principale sont allumés par un signal du radar d'altitude, ralentissant l'engin spatial à 137 m/s jusqu'à l'épuisement du carburant et l'éjection de la rétrofusée. La descente se poursuit sous le contrôle des moteurs verniers et des radars doppler et altimètre.
Quelques secondes avant de toucher le sol lunaire, le radar de descente de l'atterrisseur perd son verrouillage, apparemment en raison de la réflexion de roches hautement scintillantes qui s'élèvent du site d'atterrissage. Le moteur principal ne s'arrête pas à environ 4,3 m d'altitude. Le système de guidage passe automatiquement vers un mode à commande inertielle qui empêche l'arrêt du moteur vernier. Le toucher de la sonde sur la surface lunaire se produit trois fois parce que les moteurs verniers continue leurs allumages durant les deux premiers atterrissages, ce qui fait décoller le véhicule spatial de la surface. La distance entre le premier et deuxième site d'atterrissage est de 20 mètres environ et entre le deuxième et le troisième site d'atterrissage est de 11 mètres. Le moteur est finalement arrêté 34 secondes après le premier atterrissage par une commande d'arrêt transmise depuis la Terre. L'atterrissage initial se produit à 00 h 04 min 17 s TU et l'atterrissage final à 00 h 04 min 53 s TU le à 3,0163° S, 336,582° E (déterminé à partir des images du Lunar Reconnaissance Orbiter). Le véhicule spatial se déplace d'environ 30 cm après l'atterrissage final. Surveyor 3 s'immobilise sur une pente de 14° à l'intérieur d'un cratère de 200 mètres dans le sud-est de l'océan des Tempêtes (Oceanus Procellarum) à 370 km au sud du cratère Copernic.
Les premières photos sont reçues dans l'heure suivant l'atterrissage et l'échantillonneur de surface est utilisé deux jours plus tard. Surveyor 3 fonctionne tout au long de la journée lunaire jusqu'au coucher de Soleil le . L'échantillonneur lunaire est exploité durant un total de 18 h 22 min, creusant des tranchées aussi profondes que 18 cm, et la caméra de télévision envoie 6 326 images. Un grand volume de nouvelles données sur la force, la texture et la structure du sol lunaire sont transmises par la sonde lunaire. Sur la base de ces expériences, les scientifiques concluent que le sol lunaire a une consistance similaire au sable humide, avec une force portante d'environ 0,7 kg par cm2, suffisamment solide pour supporter le module lunaire Apollo. Des images d'une éclipse solaire par la Terre et les mesures thermiques associées sont enregistrées. Les dernières données sont transmises le à 00 h 04 TU et Surveyor 3 ne reprend pas contact après la nuit lunaire de deux semaines. Un éblouissement excessif sur certaines photographies est attribué à des effets de poussière ou d'érosion sur le miroir en raison du fonctionnement prolongé des moteurs durant l'atterrissage. Tous les objectifs de la mission sont atteints.
Visite des astronautes de Apollo 12
Le site de Surveyor 3 est choisi pour la mission Apollo 12, quatre mois seulement après les tout premiers pas de l'homme sur la Lune, ce qui exige un maniement du module lunaire d'une extrême précision .
Le , Charles Conrad et Alan Bean se posent à environ 180 m de Surveyor et, le lendemain, lors de leur seconde sortie extravéhiculaire, ils partent examiner la sonde, prenant de nombreuses photos et prélevant environ 10 kg de pièces et composants (dont la caméra de télévision) pour un examen ultérieur sur Terre, ceci afin que soit étudié l'impact des radiations solaires sur les appareillages au fil du temps.
Il apparaitra plus tard qu'environ 50 à 100 de bactéries ont survécu dans cet environnement hostile durant deux ans et demi, dont le Streptococcus mitis, qui s'était incidemment logé à l'intérieur de la caméra peu avant le lancement de la sonde. Bien qu'attirant peu l'attention à l'époque, cette découverte apporte des arguments à l'idée de panspermie interplanétaire, et - plus important - amène la NASA à adopter des procédures beaucoup plus strictes pour éviter la contamination de la planète Mars et d'autres planètes suspectées de pouvoir héberger la vie. L'exemple le plus spectaculaire est la sonde Galileo qui est détruite à la fin de sa mission en l'envoyant dans l'atmosphère de Jupiter pour éviter qu'elle ne s'écrase sur son satellite naturel Europe. La NASA pense maintenant que la détection de ces bactéries est causée par des erreurs dans les procédures scientifiques après le retour de la caméra sur Terre, d'autant que la bactérie elle-même n'est pas du tout extrêmophile mais mésophile[2].
La caméra de Surveyor 3 est exposée au National Air and Space Museum à Washington, D.C.
Notes et références
- https://planetaryprotection.arc.nasa.gov/missions
- (en) Apollo 12 Remembered: Lunar Germ Colony or Lab Anomaly? - Astrobiologie magazine,
Voir aussi
Articles connexes
Liens externes
- (en) Surveyor Program Results (1969) [PDF]
- (en) Analysis of Surveyor 3 material and photographs returned by Apollo 12 (1972) [PDF]
- (en) Examination of Surveyor 3 surface sampler scoop returned by Apollo 12 mission (1971) [PDF]
- (en) Surveyor 3 parts and materials returned from the moon by Apollo 12 - Evaluation of lunar effects - [PDF]
 Portail de l’astronautique
Portail de l’astronautique  Portail de la Lune
Portail de la Lune