Transformations de Lorentz
Les transformations de Lorentz sont des transformations linéaires des coordonnées d'un point de l'espace-temps de Minkowski à quatre dimensions. En relativité restreinte, elles correspondent aux lois de changement de référentiel galiléen pour lesquelles les équations de la physique sont préservées, et pour lesquelles la vitesse de la lumière demeure identique dans tous les référentiels galiléens. Elles sont parfois considérées comme l'équivalent relativiste des transformations de Galilée de la mécanique classique.
- Cet article présente les transformations de Lorentz sous un aspect technique. Le lecteur désireux d'obtenir des informations physiques plus générales à ce sujet pourra se référer à l'article relativité restreinte.

La forme la plus courante est :

Où (t, x, y, z) et (t′, x′, y′, z′) représentent les coordonnées d'un événement dans deux référentiels inertiels dont la vitesse relative est parallèle à l'axe des , est la vitesse de la lumière, et le facteur de Lorentz est .




Le terme « transformations de Lorentz » peut faire référence aux changements de coordonnées présentés ci-dessus, parfois nommés transformations de Lorentz spéciales ou boost de Lorentz, ou bien à un ensemble plus vaste nommé groupe de Lorentz. Ce groupe est constitué de l'ensemble des transformations linéaires compatibles avec les postulats de la relativité restreinte, c'est-à-dire celles qui laissent invariant la pseudo-norme de l'espace de Minkowski. Le groupe de Lorentz inclut non seulement les boosts de Lorentz pour toute direction arbitraire de l'espace, mais également les pivotements du repère d'espace, nommés rotations statiques[1] de l'espace. Dans le cadre des théories quantiques relativistes et de la description des particules élémentaires, les transformations qui renversent le sens du temps et l'orientation du repère d'espace sont également admises, bien qu'elles puissent sembler dénuées de sens en relativité restreinte. Le groupe de Lorentz est lui-même un sous-groupe du groupe de Poincaré qui étend la définition précédente aux transformations affines, sans se limiter aux transformations linéaires. Le groupe de Poincaré permet ainsi de représenter l'ensemble des changements de repère autorisés en relativité restreinte, y compris ceux impliquant un décalage de l'origine du repère d'espace-temps.
Dans l'introduction à la publication « Deux Mémoires de Henri Poincaré sur la physique mathématique », Acta Matematica, vol. 38, p. 293-308, en 1921, Hendrik Lorentz précise que c'est pour faire en sorte que les équations de Maxwell s'écrivent à l'identique dans tout référentiel galiléen que Henri Poincaré a introduit mathématiquement cette loi[2], en la baptisant du nom de Lorentz. Ce dernier en avait donné une version qu'il a, plus tard, jugée imparfaite[3],[4].
Présentations les plus courantes
On considère deux référentiels galiléens et en translation rectiligne uniforme l'un par rapport à l'autre, tels que se déplace à la vitesse par rapport à suivant la direction de l'axe des . On note respectivement et les trois coordonnées spatiales et le temps permettant de repérer un même événement observé depuis chacun de ces référentiels.




Les transformations de Lorentz entre ces deux référentiels sont alors :
| Transformation de Lorentz (direction )
|
avec et .


Le paramètre est constant pour une transformation donnée. C'est une grandeur algébrique, positive ou négative, dont la valeur absolue ne peut être égale ou supérieure à : (un déplacement dans le sens positif de l'axe des est compté positivement). Seules les vitesses subluminiques sont ainsi autorisées, et les valeurs possibles pour et sont donc : et .





Les transformations ne sont pas définies si est en dehors de ces limites. En effet, prend une valeur infinie pour et devient un nombre complexe pour . Les coordonnées de temps et d'espace étant des grandeurs mesurables, leur valeur est nécessairement décrite par un nombre réel.


Par ailleurs, en vertu du principe de relativité, aucun référentiel galiléen n'est privilégié par rapport à un autre. Par conséquent, les transformations pour passer de à doivent être de la même forme que celles permettant de passer de à . La seule asymétrie réside dans le fait que se déplace à la vitesse par rapport à . Les transformations inverses s'écrivent ainsi :

| Transformation de Lorentz inverse (direction )
|

Les transformations de Lorentz ont ici été présentées comme des transformations passives des coordonnées, autrement dit on a comparé la manière dont un même évènement était observé depuis deux référentiels différents. Un autre point de vue consiste à les envisager comme des transformations actives qui n'affectent pas le référentiel mais le système physique lui-même. Les nouvelles coordonnées décrivent alors le phénomène tel qu'il serait observé si l'ensemble du système se trouvait embarqué dans un mouvement rectiligne uniforme à la vitesse suivant l'axe des dans ce même référentiel.
- Formes alternatives
- En utilisant , on obtient une écriture plus symétrique des transformations[5] :


- Pour un doublet d'évènements. Une forme portant sur les différences de coordonnées peut apparaître comme plus intéressante, car ce sont bien des longueurs et des intervalles de temps qui sont mesurés expérimentalement ou qui présentent un intérêt sur le plan physique. En notant et les différences de coordonnées entre deux événements observées depuis chaque référentiel, la linéarité des transformations de Lorentz entraîne[6] :



- En théorie quantique relativiste, l'inversion temporelle T et l'inversion spatiale P sont également admises. Les transformations de Lorentz qui laissent les équations de la physique invariantes (en l'absence de charge électrique) sont alors :
- où les indiquent s'il y a un changement d'orientation temporelle et/ou spatiale.


- Note : Plus généralement, toute transformation utilisée en physique quantique est de la forme , avec une transformation du groupe de Lorentz de la relativité restreinte (orthochrone et propre) et . Le groupe des transformations propres et orthochrones étant connexe, cette décomposition indique que le groupe de Lorentz est formé de quatre composantes connexes.



Présentation sous forme matricielle
Sous forme matricielle, les transformations de Lorentz s'écrivent :

où la matrice notée satisfait les propriétés attendues suivantes :
- , ce qui signifie que la transformation préserve l'orientation de l'espace.
- , où est la métrique de Minkowski , ce qui signifie que la matrice est pseudo-orthogonale et préserve la pseudo-norme de l'espace de Minkowski.




La transformation inverse est donnée par :


Cette écriture sous forme de matrice 4×4 correspond à la représentation standard du groupe de Lorentz, notée (½,½). Les objets qui se transforment sous cette représentation sont des quadrivecteurs (ici, le quadrivecteur temps-position). D'autres représentations matricielles sont cependant possibles et permettent d'appliquer les transformations de Lorentz à des objets de nature différente (ex : champ électromagnétique, bispineurs de Dirac...).
Présentation comme rotation hyperbolique
Des définitions et il découle .
L'analogie avec la relation de trigonométrie hyperbolique permet de définir la rapidité en posant :





- et avec .



Toute transformation de Lorentz spéciale peut ainsi s'écrire :

Et la forme inverse :

La ressemblance avec une matrice de rotation dans l'espace ordinaire amène à voir toute transformation de Lorentz spéciale comme une rotation hyperbolique d'angle dans l'espace-temps de Minkowski (où est la rapidité). Cette « rotation » présente cependant la particularité d'affecter également la coordonnée temporelle. Le caractère pseudo-orthogonal des matrices de rotation met en évidence que ces transformations sont bien des isométries de l'espace de Minkowski
Présentation sous forme diagonalisée
Avec les définitions et propriétés des fonctions de la trigonométrie hyperbolique, on obtient une présentation un peu différente des transformations de Lorentz :

Soit, sous forme matricielle :

Ce qui est une forme diagonalisée avec des choix de repères dont deux axes forment l'intersection du cône de lumière avec le plan (Oxt), ou (Ox't') pour l'autre repère, et qui sont impossibles à matérialiser dans l'espace physique à trois dimensions.
Présentation pour une direction quelconque
Les transformations de Lorentz peuvent être généralisées à une direction quelconque de l'espace. Pour deux repères galiléens en translation rectiligne uniforme l'un par rapport à l'autre, tels que le mouvement relatif de par rapport à soit décrit par un vecteur vitesse et tels que les origines des deux repères soient confondues à , les transformations s'écrivent sous forme vectorielle :


| Transformation de Lorentz (direction v quelconque)
|

où et où et désignent les coordonnées spatiales observées depuis chaque référentiel. Ces formules doivent naturellement demeurer valables dans tous les référentiels inertiels. Le mouvement relatif de par rapport à étant décrit par le vecteur , la transformation inverse s'écrit par conséquent :




| Transformation de Lorentz inverse (direction -v quelconque)
|

En écriture matricielle, on obtient[7] :

avec :

Présentation pour d'autres grandeurs
Quadrivecteurs
Bien que les transformations de Lorentz soient initialement présentées comme des changements de coordonnées de temps et d'espace, elles s'appliquent de manière plus générale à toute quantité physique pouvant être décrite par un quadrivecteur (un quadrivecteur étant par définition un vecteur de dimension quatre dont les composantes se transforment de la même manière que les coordonnées de temps et d'espace). Lors d'un changement de coordonnées, un quadrivecteur est donc transformé en par la relation matricielle linéaire :


où est une transformation de Lorentz exprimée en représentation standard par une matrice 4×4. Par ailleurs, en posant , avec , la pseudo-norme de tout quadrivecteur est donnée par et satisfait une relation de la forme :




indiquant que la norme du quadrivecteur est un invariant relativiste.
| Quadrivecteur | A | Z | X |
|---|---|---|---|
| Quadrivecteur position | Temps | Vecteur position | |
| Quadrivecteur impulsion | Energie | Vecteur quantité de mouvement | |
| Quadrivecteur vitesse[8] | Vitesse de la lumière | Vecteur vitesse | |
| Quadrivecteur force | Puissance mécanique | Vecteur force | |
| Quadrivecteur potentiel | Potentiel électrique | Potentiel vecteur magnétique | |
| Quadrivecteur densité de courant | Densité de charges électriques | Vecteur densité de courant | |
| Quadrivecteur d'onde | Pulsation | Vecteur d'onde | |
| Quadrivecteur spin[9] | - | Spin |








Il existe cependant des grandeurs qui ne peuvent s'écrire sous forme de quadrivecteur. C'est par exemple le cas pour le moment cinétique et également pour le champ électrique et le champ magnétique . Le moment cinétique est par définition et devient après un boost . Concernant les champs et , ils constituent deux aspects complémentaires du champ électromagnétique et ne peuvent donc être transformés de manière séparée. En prenant la force de Lorentz comme définition de ces champs, l'application du principe de covariance aux lois de l'électromagnétisme implique que l'expression doit conserver une forme identique après un changement de référentiel inertiel .







Champ électromagnétique
Les formules de transformation des champs et suggèrent que ces deux grandeurs sont couplées en un objet mathématique à 6 composantes : un tenseur de rang 2 antisymétrique, c'est-à-dire un bivecteur. Le tenseur électromagnétique s'écrit sous forme matricielle :
- (Convention de signature (+ − − −))

Les champs obtenus après transformation de Lorentz sont donnés sous forme matricielle par :


ou bien en écriture tensorielle :

Pour un simple boost suivant l'axe , on obtient :

Autres quantités
Pour un objet général à composantes, les transformations de Lorentz s'écrivent :


avec la représentation qui à toute transformation associe une matrice . Les différentes représentations du groupe de Lorentz (en) sont construites à partir de l'algèbre de Lie du groupe de Lorentz, par exponentiation de matrice.


Implications physiques
Les transformations de Lorentz peuvent être mises en parallèle avec les transformations de Galilée de la mécanique classique :
Transformation de Galilée Transformation de Lorentz



On constate que, contrairement au cas classique, la coordonnée temporelle est désormais affectée par le changement de référentiel, le temps ne pouvant plus être considéré comme absolu en relativité. La notion de simultanéité entre deux évènements devient relative, ce qui signifie que deux évènements simultanés dans un référentiel ne le sont pas nécessairement dans un autre. Le facteur présent devant les parenthèses entraîne l'apparition de phénomènes tels que la contraction des longueurs et la dilatation des durées[10]. Le renoncement à la conception d'un espace et d'un temps absolus permet de garantir l'invariance de c dans tous les référentiels galiléens, en opposition avec la vision classique qui postulait l'existence d'un éther servant de support mécanique à la propagation des ondes lumineuses.
Limites non relativistes
Groupe de Galilée
Les formules du groupe de Lorentz peuvent s'approximer dans le cas où la vitesse du corps est petite devant celle de la lumière, ou, ce qui revient au même, en faisant tendre la vitesse de la lumière vers l'infini. En négligeant le terme dans les formules, on retrouve alors le groupe de Galilée qui est le groupe des transformations correspondantes aux changements de référentiel en physique classique.



Groupe de Carroll
Le groupe de Carroll est une autre approximation non relativiste des éléments du groupe de Lorentz dans le cas où on s'intéresse aux intervalles grands de genre espace. Cette approximation, découverte par Jean-Marc Lévy-Leblond en 1965, n'a d'intérêt que pédagogique, d'après son découvreur[11].
Différentes méthodes pour trouver les transformations
- Pour la relativité restreinte, Einstein a initié une méthode[12] :
- À partir du principe de relativité et de l'invariance de la vitesse de la lumière par changement de référentiel, de l'homogénéité et de l'isotropie supposées de l'espace, et à l'aide d'une représentation géométrique d'une situation idéale où deux référentiels inertiels permettent de voir, mesurer les longueurs, et chronométrer le temps d'un référentiel à l'autre, on démontre les différentes formules par un système d'équations linéaires dont il faut trouver les coefficients. Les transformations non physiques sont parfois écartées sans détail par le choix de la solution positive dans une équation du second degré, choix dû à l'hypothèse physique de l'orientation des repères par une règle telle que celle de la main droite, illustrée par la représentation géométrique accompagnant le raisonnement[13].
- En physique quantique relativiste, comme en théorie quantique des champs, les transformations utilisées sont définies comme les symétries de l'espace de Minkowski qui laissent inchangées les équations (en l'absence de charge électrique). Cela revient à déterminer les transformations linéaires laissant inchangé l'intervalle d'espace-temps : c'est une définition mathématique pour laquelle les changements de référentiel pour des observateurs ne sont que certaines de ces transformations et qui permet de les trouver toutes.
Cette méthode est aussi utilisée dans certains manuels de relativité restreinte, après avoir démontré que l'invariance de l'intervalle d'espace-temps par changement de référentiel découle directement des deux axiomes de la relativité restreinte, et en éliminant les transformations qui ne respectent pas la convention d'orientation pour les repères tridimensionnels (règle de la main droite, en général) et d'orientation de l'axe du temps vers le futur ; élimination faite de diverses manières, parfois marquées du sceau de l'évidence[14], et parfois plus justifiées[15].
- On peut aussi retrouver ces transformations en cherchant les applications linéaires de l'espace-temps à quatre dimensions, mais a priori sans métrique, conservant la forme des équations de Maxwell[16].
La méthode géométrique[17]
On suppose que l'espace-temps physique est un espace affine où les référentiels, dont seuls sont considérés ceux qui sont inertiels, sont identifiés aux repères affines de cet espace affine. De plus on néglige les translations constantes entre les repères qui ne se manifestent que par des additions de nombres constants aux coordonnées. Donc, la transformation des coordonnées s'effectue au moyen d'une application linéaire, représentable par une matrice :
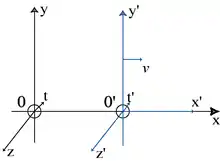
Soient deux référentiels et en translation rectiligne l'un par rapport à l'autre sur des axes parallèles, avec une vitesse relative v selon l'axe Ox. Soient les coordonnées spatio-temporelles d'un événement dans le référentiel , et ses coordonnées dans le référentiel . (Pour simplifier les notations, on ne tiendra pas compte dans ce paragraphe des deux autres composantes spatiales y et z).



- Utilisation du principe de relativité :
- Par le principe de relativité, les coefficients de la transformation linéaire ne dépendent que de la vitesse relative entre les référentiels, et d'aucune considération extérieure à ces deux référentiels. Pour plus de précision, on devrait dire des vitesses relatives des référentiels, le sujet est abordé un peu plus loin.
- Première utilisation de la vitesse de la lumière :
- Si dans le référentiel on considère le déplacement d'un signal lumineux dans le sens des x positifs, donc à la vitesse de la lumière, alors . Mais comme cette vitesse est la même dans le référentiel , en considérant le déplacement de ce même signal vu depuis ce référentiel, comme l'axe des x' a la même orientation que celui des x, et de même pour les axes temporels, on doit avoir [18]. De même, en commençant par considérer le signal depuis .


- Donc :

- Et comme x, t, x', t' sont liés par des relations linéaires à coefficients constants, on doit avoir et (avec a, b, a' et b' coeff constants), d'où , or comme , on en déduit , d'où pour un certain constant.







- Deuxième utilisation de la vitesse de la lumière :
- En considérant le déplacement d'un signal lumineux dans le sens des x négatifs, et en faisant le même raisonnement, on obtient : pour un certain constant.


- Conclusion sur la vitesse de la lumière :
- En additionnant et soustrayant les deux égalités précédentes, on obtient :
- avec : et .



- Première utilisation de la vitesse relative des référentiels :
- Pour l'origine du référentiel , on a et donc, d'après la première équation du système (2), on a :
- En désignant par la vitesse du référentiel par rapport au référentiel , on peut donc écrire
- , ou , avec
- On peut donc écrire :






- Deuxième utilisation de la vitesse relative des référentiels :
- Pour l'origine du référentiel , on a et donc, d'après les équations du système (2), on a :
- En désignant par la vitesse du référentiel par rapport au référentiel , on peut donc écrire
- .




- Utilisation des hypothèses sur l'espace :
- Quand , on a . Le coefficient permet donc de convertir la mesure d'une longueur faite dans le référentiel , en la mesure faite dans . Ce coefficient peut dépendre de la vitesse relative entre les référentiels, mais pas de sa direction ni de son sens par l'hypothèse de l'isotropie de l'espace. De plus, comme expliqué en début de paragraphe, est indépendant des coordonnées x, t, x', t'.
- Donc dépend de la norme de la vitesse , c'est-à-dire de .




- Utilisation du principe de relativité :
- En inversant les rôles des référentiels et , et ayant justifié que , et que ne dépend pas de la direction ni du sens de , donc , et on peut écrire :
- En utilisant les deux équations du système (3) dans la première équation du système (4), on obtient soit :
- Le signe + est choisi, sinon il y a changement dans l'orientation entre l'axe des x et l'axe des x', ce qui n'est pas le cas par hypothèse.






- Conclusion :
- Les transformations de Lorentz s'écrivent :
- Ce que l'on écrit souvent :
- Avec et .




La méthode partant de l'invariance de la pseudo-norme
Dans ce paragraphe[19], les coordonnées sont celles du référentiel inertiel et sont celles du référentiel inertiel , ces deux référentiels ayant les mêmes origines spatiales et temporelles.



Dans l'espace-temps de Minkowski, la pseudo-norme est définie par le carré de l'intervalle d'espace-temps :

Les transformations de Lorentz sont les applications linéaires sur les quadri-coordonnées qui laissent invariante la pseudo-norme :


- Cas où la transformation ne concerne que les coordonnées spatiales
Dans ce cas, l'invariance de la pseudo-norme implique , c'est-à-dire que la transformation conserve la norme spatiale : la matrice 3x3 associée est une matrice orthogonale.

- Si son déterminant est positif, il s'agit d'une rotation dans l'espace et elle conserve donc l'orientation de l'espace. La transformation de l'espace-temps laisse le temps inchangé et agit comme une rotation d'un angle constant sur les vecteurs de l'espace, elle est considérée comme physiquement réaliste.
- Si son déterminant est négatif intervient en plus une symétrie planaire qui inverse l'orientation de l'espace. La transformation, laissant le temps inchangé mais inversant l'orientation spatiale, n'est pas considérée comme physiquement réaliste, mais peut être utilisée pour explorer les propriétés mathématiques des équations.
- Cas où la transformation concerne aussi la coordonnée temporelle
Pour plus de légèreté dans les notations, on remplace par , par , etc.




- La linéarité d'une telle transformation permet d'écrire :
- où est un réel constant, est une matrice 3x3 à coefficients constants, et sont deux vecteurs constants de l'espace, avec le transposé de , et le produit scalaire des vecteurs et .







- Par une transformation de Lorentz ne touchant que les coordonnées spatiales, on peut faire en sorte que les vecteurs et soient colinéaires : on a donc et où est un vecteur unitaire () constant lui aussi, et et deux réels constants (éventuellement nuls).
- On peut donc écrire







- La pseudo-norme étant une forme quadratique, son invariance par une transformation est équivalente à l'invariance de la forme bilinéaire associée :


- Or on a , donc , soit
- Cette égalité étant vraie pour tout et tout vecteur de l'espace , on a . Si , alors la matrice n'est pas inversible (car admet 0 comme valeur propre car ) et la transformation de Lorentz associée n'est pas un changement de base de l'espace à quatre dimensions : ce qui ne correspond pas aux hypothèses. Si , alors ou et un court travail montre que l'on retombe alors dans le cas où la transformation ne concerne que les vecteurs de l'espace.
- Donc , , , et , avec .
















- On pose et , on a , avec et .





- L'invariance par la transformation de Lorentz signifie que . En développant et en utilisant , avec , on obtient .


- Cette égalité étant vraie pour tout et tout vecteur de l'espace , on a :
- En exploitant le cas particulier , on obtient .
- En exploitant le cas particulier (c'est-à-dire ), on obtient , et l'endomorphisme de matrice est une isométrie de l'espace de dimension 2 des vecteurs perpendiculaires à dans lui-même[20].
- Donc, en posant = restriction de au plan des vecteurs perpendiculaires à , et , on a :
- Avec
- En utilisant à nouveau une transformation de Lorentz ne concernant que les coordonnées spatiales, et même plus précisément le sous-espace des vecteurs perpendiculaires à , on peut se ramener au cas , et on a alors :
- Avec












- En choisissant la direction du vecteur comme axe des , en utilisant les fonctions hyperboliques, et avec permettant de discuter de la conservation ou non des orientations du temps et de l'espace, on obtient :

Histoire et genèse des transformations de Lorentz
- Woldemar Voigt publie en 1887 un article sur l'effet Doppler[21] dans lequel il remarque l'invariance de certaines équations différentielles sous les changements de variables (en notation moderne pour en faciliter la lecture) :

- En 1889, George Francis FitzGerald publie dans la revue Science l'article L'éther et l'atmosphère terrestre, dans lequel il formule l'hypothèse de contraction des longueurs, hypothèse que Hendrik Lorentz formulera aussi, indépendamment de FitzGerald, dans un article de 1892[22].
- Dans son ouvrage La théorie électromagnétique de Maxwell et son application aux corps mouvants[23] de 1892, Lorentz utilisera des transformations bien différentes de celles de Voigt :

- Aussi bien pour Voigt que pour Lorentz, ces transformations ne sont encore que des outils mathématiques sans signification particulière.
- Lorentz introduit le concept de temps local correspondant à l'image de la coordonnée de temps par ces transformations. Toutefois, ce temps local n'a pas pour lui de signification autre que mathématique :
« It is important to understand that for Lorentz the transformed coordinates and fields were mathematical aids with no direct physical significance. »
— Olivier Darrigol, The genesis of the theory of relativity, séminaire Poincaré, 2005.
- Dans un article de 1899[24], Lorentz observera que l'hypothèse de contraction découle naturellement des transformations qu'il reformulera :

- Dans un article de 1904[25] Lorentz donnera des transformations encore différentes:

- On voit donc qu'en 1904, la forme de ces transformations n'est pas encore parfaitement déterminée, elle apparaît par tâtonnement, par essais/erreurs.
- L'année suivante, 1905, Henri Poincaré présente à l'Académie des Sciences la note Sur la dynamique de l'électron résumant son article qu'il prévoit de présenter à Palerme[2], et dans laquelle il confirme et corrige les résultats de Lorentz de 1904, donne leur nom aux transformations de Lorentz (corrigées)

- et observe qu'elles doivent former un groupe[26].
- Il leur donne ainsi leur forme définitive (au signe près, ce qui revient juste à considérer les transformations inverses) :

- La même année, Einstein publie son article Sur l'électrodynamique des corps en mouvement dans lequel il reconstruit ces mêmes transformations, et leur donne tout leur sens.
Notes et références
- Amaury Mouchet, L'élégante efficacité des symétries, Dunod, (lire en ligne)
- Henri Poincaré, Sur la dynamique de l'électron, Comptes rendus de l'Académie des Sciences, vol. 140, p. 1504-1508, 5 juin 1905. Note manuscrite.
- Lorentz écrit : « Ce furent ces considérations publiées par moi en 1904 qui donnèrent lieu à Poincaré d'écrire son Mémoire sur la Dynamique de l'électron, dans lequel il a attaché mon nom à la transformation dont je viens de parler. [...] je n'ai pas indiqué la transformation qui convient le mieux. Cela a été fait par Poincaré et ensuite par MM. Einstein et Minkowski. »
- Henri Poincaré, Sur la dynamique de l'électron, Rendiconti del Ciorcolo matematico di Palermo, vol. 21, p. 129-176, 1906. Soumis le 23 juillet 1905.
- Une forme encore plus simple est parfois obtenue en posant , dans les systèmes d'unités naturelles.
- James H. Smith, Introduction à la relativité, InterEditions (1968). 2e édition avec exercices corrigés (1979) (ISBN 978-2-7296-0088-4). Réédité par Masson (Dunod - 3e édition - 1997), (ISBN 978-2-225-82985-7)
- W. H. Furry, « Lorentz Transformation and the Thomas Precession », American Journal of Physics, vol. 23, no 8, , p. 517–525 (ISSN 0002-9505, DOI 10.1119/1.1934085, Bibcode 1955AmJPh..23..517F, lire en ligne)
- Le facteur intervenant dans la définition de la quadrivitesse n'est pas invariant lors d'un changement de référentiel.
- La coordonnée temporelle du quadrivecteur spin est fixée à 0 dans le référentiel propre de la particule. Un observateur en mouvement percevra cependant une valeur non nulle de et un spin altéré. (Chaichian et Hagedorn, Symmetry in quantum mechanics: From angular momentum to supersymmetry, IoP, (ISBN 978-0-7503-0408-5, lire en ligne), p. 239)
- Au sein d'un même référentiel galiléen, le temps continue cependant d'être défini de manière univoque. Autrement dit, toutes les horloges immobiles dans un référentiel inertiel donné demeurent synchronisées au cours du temps, même lorsqu'elles sont séparées spatialement par de grandes distances. Ce n'est plus le cas en relativité générale où la notion de simultanéité perd toute signification et ne peut plus être définie que localement.
- Le groupe de Carroll par JM Levy-Leblond, Annales de l'IHP, 1965.
- Que l'on peut trouver dans La théorie de la relativité, par Albert Einstein, Gauthier-Villard éditeur, 1921, traduit par Mlle J. Rouvrière.
- Un exemple récent est dans le chapitre 5 du livre Introduction à la relativité par James H.Smith (Masson éditeur, traduit par Philippe Brenier, préfacé par Jean-Marc Levy-Leblond, réédité en 1997, (ISBN 2-225-82985-3)).
- Un exemple de choix justifié par l'évidence est dans le §19 du livre Électromagnétisme et gravitation relativistes de Jean-Claude Boudenot (ellipses éditeur, 1989, (ISBN 2-7298-8936-1)); un autre est dans le §4, de Lev Landau et Evgueni Lifchits, Physique théorique, t. 2 : Théorie des champs [détail des éditions].
- Comme exemples de textes discutant plus en détail des critères de choix, on peut citer (en) Geometrical physics in Minkowski spacetime par E.G. Peter Rowe, Springer-Verlag éditeur (ISBN 1852333669), 2001; (en) The geometry of Minkowski Spacetime par Gregory L. Naber, Springer-Verlag (ISBN 3540978488), 1992, où au chapitre 1, §1.3, la conservation des orientations spatiale et temporelle est présentée comme la raison de cette sélection ; dans le livre de Philippe Tourrenc, Relativité et gravitation (Armand Colin éditeur, (ISBN 2-200-21209-7)), aux pages 23 à 25, l'auteur justifie, par l'utilisation du Principe de correspondance, le choix des transformations de Lorentz pour la relativité restreinte parmi toutes les transformations déduites de l'hypothèse de l'invariance de l'intervalle d'espace-temps ; la problématique de la conservation ou non de ces orientations est discutée en détail dans le chapitre 1 du livre La géométrie de la relativité restreinte, par Jean Parizet, éditeur ellipses, 2008, 172 pages, (ISBN 978-2-7298-3902-4)
- Cette méthode est présentée, en utilisant des formes différentielles et avec des erreurs typographiques, dans le chapitre 1 du livre La géométrie de la relativité restreinte, par Jean Parizet, éditeur ellipses, 2008, 172 pages, (ISBN 978-2-7298-3902-4).
- Lev Landau et Evgueni Lifchits, Physique théorique, t. 2 : Théorie des champs [détail des éditions]§1 à 4.
- Cette égalité n'est valable qu'avec l'hypothèse de conservation des orientations de l'espace et du temps par changement de référentiel. En toute généralité, on doit donc écrire , où indique l'orientation relative des référentiels (O,x,t) et (O,x',t') et permet d'enrichir la fin du paragraphe d'une discussion sur les choix entre les différentes transformations de Lorentz compatibles avec les mathématiques de la relativité restreinte, en introduisant explicitement l'hypothèse de non-changement de l'orientation des référentiels.
- Les principales étapes de cette démonstration sont, par exemple, dans le chapitre 1 du livre La géométrie de la relativité restreinte, par Jean Parizet, éditeur ellipses, 2008, 172 pages, (ISBN 978-2-7298-3902-4).
- On a : si , alors , donc . Conclusion : est bien la matrice d'un endomorphisme de l'espace de dimension 2 des vecteurs perpendiculaires à dans lui-même.
- Woldemar Voigt, Ueber das Doppler'sche Princip, Göttinger Nachrichten, num. 7, p41-51, 1887
- H.A.Lorentz, Die relative Bewegung der Erde und des Äthers, Zittingsverlag Akad. Wet. Amsterdam, vol. 1, p74, 1892.
- H.A.Lorentz, La théorie électromagnétique de Maxwell et son application aux corps mouvants, Archives Néerlandaises des sciences exactes et naturelles, T. XXV, 1892.
- H.A.Lorentz, Simplified Theory of Electrical and Optical Phenomena in Moving Systems, Proceedings of the Royal Nétherlands Academy of Arts and Sciences, vol. 1, p427-442, 1899.
- H.A.Lorentz, Electromagnetic phenomena in a system moving with any velocity smaller than that of light, Proceedings of the Royal Nétherlands Academy of Arts and Sciences, vol. 6, p809, 1904.
- André Rougé, Relativité Restreinte. La contribution d'Henri Poincaré, École polytechnique, 2008.







Voir aussi
Bibliographie
- [Voigt 1887] (de) Woldemar Voigt, « Ueber das Doppler'sche Princip », Nachrichten von der Königlichen Gesellschaft der Wissenschaften und der Georg-Augusts-Universität zu Göttingen, vol. 43e année, no 2, , p. 41-51 (lire sur Wikisource, lire en ligne [PDF]).
- [Gourgoulhon 2010] Éric Gourgoulhon (préf. de Thibault Damour), Relativité restreinte : des particules à l'astrophysique, Les Ulis et Paris, EDP Sciences et CNRS, coll. « Savoirs actuels / physique », , 1re éd., 1 vol., XXVI-776, fig., 15,5 × 23 cm (ISBN 978-2-7598-0067-4, EAN 9782759800674, OCLC 690639994, BNF 41411713, SUDOC 14466514X, présentation en ligne, lire en ligne).
Articles connexes
Liens externes
- (en) Jean-Marc Lévy-Leblond, « One more derivation of the Lorentz transformation » [PDF]
- Jean-Marc Lévy-Leblond, « Les relativités », Les Cahiers de Fontenay, no 8, (lire en ligne [PDF]).
- (en) Victor Yakovenko, « Derivation of the Lorentz Transformation » [PDF], université du Maryland.
 Portail de la physique
Portail de la physique