Desplazamiento angular
El desplazamiento angular de un cuerpo es el ángulo (expresado en radianes, grados, revoluciones o cualquier otra unidad de medida angular) con el que se indica el giro de un elemento alrededor de un eje de rotación determinado, respecto a una orientación inicial y en un sentido específico. Cuando un cuerpo gira sobre su eje, el movimiento no puede simplemente analizarse como el de una partícula, ya que durante el movimiento circular experimenta una velocidad y aceleración cambiantes en cualquier instante (t). Cuando se trata de la rotación de un objeto, el caso más simple es considerarlo como un sólido rígido, es decir considerar que la distancia entre todas sus partículas se mantiene constante independientemente del movimiento del cuerpo. Desde un punto de vista práctico, cualquier objeto es potencialmente deformable, pero en un gran número de casos, la magnitud de estas deformaciones es despreciable. La rotación de un cuerpo rígido respecto a un eje fijo se denomina movimiento rotativo.
Ejemplo
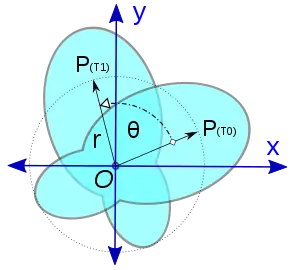
En el ejemplo ilustrado al comienzo del artículo, una partícula P está a una distancia fija r del origen O, girando en sentido antihorario. Representando la posición de la partícula P en términos de sus coordenadas polares (r, θ), en este ejemplo particular, el valor de θ está cambiando, mientras que el valor del radio sigue siendo el mismo (obsérvese que expresando su posición en coordenadas cartesianas (x, y) tanto x como y varían con el tiempo). A medida que la partícula se mueve a lo largo de la circunferencia, recorre una longitud de arco s, que se relaciona con la posición angular a través de la relación:

Mediciones
El desplazamiento angular se mide habitualmente en radianes o en grados. El uso de radianes proporciona una relación muy simple entre la distancia recorrida alrededor del círculo y la distancia r desde el centro de giro:

Por ejemplo, si un cuerpo gira 360° alrededor de un círculo de radio r, el desplazamiento angular viene dado por la distancia recorrida alrededor de la circunferencia, que es 2πr, dividida por el radio: , lo que se simplifica fácilmente a: . Por lo tanto, 1 revolución equivale a radianes.



Cuando una partícula viaja del punto P al punto Q en un intervalo de tiempo , como lo hace en la ilustración de la derecha, el radio del círculo pasa por un cambio de ángulo , que es igual a su desplazamiento angular.


Tres dimensiones
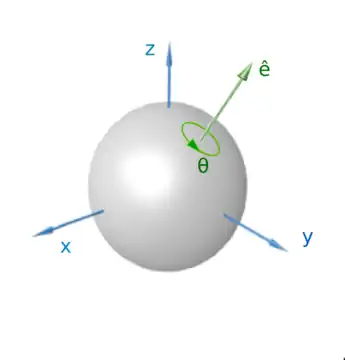
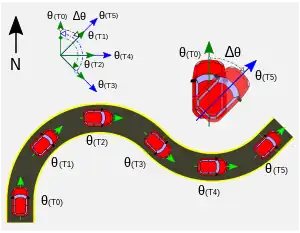
En tres dimensiones, el desplazamiento angular es una entidad con una dirección y una magnitud. La dirección especifica el eje de rotación, que siempre existe en virtud del teorema de rotación de Euler; y la magnitud indica el valor de la rotación expresada en radianes alrededor de ese eje (usando la regla de la mano derecha para determinar su sentido). Esta expresión se denomina notación axial-angular del ángulo girado.
A pesar de tener dirección y magnitud, el desplazamiento angular no es un vector propiamente dicho porque no obedece la ley conmutativa para la suma.[1] Sin embargo, cuando se trata de rotaciones infinitesimales, se pueden descartar infinitesimales de segundo orden y, en este caso, aparece la conmutatividad.
Existen varias formas de describir el desplazamiento angular, como las matrices de rotación o los ángulos de Euler. Véase cartas sobre SO(3) para otras notaciones alternativas.
Notación matricial
Dado que cualquier marco de referencia en el espacio puede describirse mediante una matriz de rotación, el desplazamiento entre ellos también puede describirse mediante una matriz de rotación. Siendo y dos matrices, la matriz de desplazamiento angular entre ellas se puede obtener como . Cuando este producto se realiza con una diferencia muy pequeña entre ambos sistemas de referencia, se obtiene una matriz cercana a la identidad.



En el límite, se genera una matriz de rotación infinitesimal.
Matrices de rotación infinitesimal
Un desplazamiento angular infinitesimal se asocia con una matriz de rotación infinitesimal:
- Como cualquier matriz de rotación, tiene un único valor propio real, que es +1. Este valor propio muestra el eje de rotación.
- Su módulo puede deducirse del valor de la rotación infinitesimal.
- La forma de la matriz es la siguiente:

El tensor de desplazamiento angular infinitesimal o generador de rotación asociado toma la forma:

de manera que su matriz de rotación asociada es . Cuando se divide por el tiempo, genera el vector de velocidad angular.

Generadores de rotaciones
Supóngase que se especifica un eje de rotación según un vector unitario [x, y, z], y que se tiene una rotación infinitamente pequeña del ángulo Δθ respecto a ese vector. Expandiendo la matriz de rotación como una suma infinita, y tomando el término de primer orden, la matriz de rotación ΔR se representa como:

Una rotación finita a través del ángulo θ alrededor de este eje puede verse como una sucesión de pequeñas rotaciones sobre el mismo eje. Aproximando Δθ como θ/N, donde N es un número grande, una rotación de θ alrededor del eje puede representarse como:

Se puede ver que el teorema de Euler esencialmente establece que todas las rotaciones pueden representarse de esta forma. El producto es el "generador" de la rotación particular, siendo (x, y, z) el vector asociado con la matriz A. Esto demuestra que la matriz de rotación y el formato de notación axial-angular están relacionados por la función exponencial.

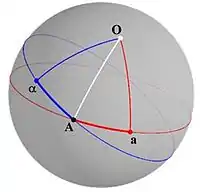
Se puede deducir una expresión simple para el generador G. Se comienza con un plano arbitrario [2] definido por un par de vectores unitarios perpendiculares a y b. En este plano se puede elegir un vector arbitrario x, con y perpendicular. Luego se resuelve y en términos de x, y sustituyendo en una expresión una rotación en un plano se obtiene la matriz de rotación R que incluye el generador G = baT - ab T.
![{\displaystyle {\begin{aligned}x&=a\cos \left(\alpha \right)+b\operatorname {sen} \left(\alpha \right)\\y&=-a\operatorname {sen} \left(\alpha \right)+b\cos \left(\alpha \right)\\\cos \left(\alpha \right)&=a^{T}x\\\operatorname {sen} \left(\alpha \right)&=b^{T}x\\y&=-ab^{T}x+ba^{T}x=\left(ba^{T}-ab^{T}\right)x\\\\x'&=x\cos \left(\beta \right)+y\operatorname {sen} \left(\beta \right)\\&=\left[I\cos \left(\beta \right)+\left(ba^{T}-ab^{T}\right)\operatorname {sen} \left(\beta \right)\right]x\\\\R&=I\cos \left(\beta \right)+\left(ba^{T}-ab^{T}\right)\operatorname {sen} \left(\beta \right)\\&=I\cos \left(\beta \right)+G\operatorname {sen} \left(\beta \right)\\\\G&=ba^{T}-ab^{T}\\\end{aligned}}}](../I/f37f72079c7cc0405c7d0e916153bc73cf884892.svg)
Para incluir vectores fuera del plano en la rotación, se necesita modificar la expresión anterior para R incluyendo dos operadores de proyección que dividen el espacio. Esta matriz de rotación modificada puede reescribirse como una función exponencial matricial
![{\displaystyle {\begin{aligned}P_{ab}&=-G^{2}\\R&=I-P_{ab}+\left[I\cos \left(\beta \right)+G\operatorname {sen} \left(\beta \right)\right]P_{ab}=e^{G\beta }\\\end{aligned}}}](../I/cd829172e134d19f1c837777248174854704041b.svg)
El análisis es a menudo más fácil en términos de estos generadores, en lugar de considerar la matriz de rotación completa. Esta técnica se conoce como el álgebra de Lie del grupo de rotación.
Relación con el álgebra de Lie
Las matrices en el álgebra de Lie no son rotaciones en sí mismas. Las matrices antisimétricas son derivadas, diferencias proporcionales de rotaciones. Una "rotación diferencial" real o matriz de rotación infinitesimal tiene la forma

donde dθ es extremadamente pequeño y A ∈ so(n), por ejemplo con A = Lx,
- .
![{\displaystyle dL_{x}=\left[{\begin{smallmatrix}1&0&0\\0&1&-d\theta \\0&d\theta &1\end{smallmatrix}}\right]}](../I/9d3f3031be2976c19939631fc37de60985f6883b.svg)
Las reglas de cálculo son las habituales, excepto porque los infinitesimales de segundo orden se eliminan sistemáticamente. Con estas reglas, estas matrices no satisfacen las mismas propiedades que las matrices de rotación finita ordinarias bajo el tratamiento habitual de los infinitesimales.[3] Resulta que el orden en que se aplican las rotaciones infinitesimales es irrelevante. Para ver esto ejemplificado, consúltese el artículo acerca del grupo de rotación SO(3).
Aplicación exponencial
La conexión del álgebra de Lie con el grupo de Lie es la aplicación exponencial, que se define utilizando la serie exponencial de una matriz estándar[4] para eA. Para cualquier matriz antisimétrica A, exp(A) es siempre una matriz de rotación.[nb 1]
Un ejemplo práctico importante es el caso 3 × 3. En el grupo de rotación SO(3), se demuestra que se puede identificar cada A ∈ so(3) con un vector de Euler ω = θ u, donde u = (x,y,z) es un vector de magnitud unitaria.
Por las propiedades de la identificación su(2) ≅ ℝ3, u está en el espacio nulo de A Por lo tanto, u es un invariante respecto a exp(A) y, por lo tanto, es un eje de rotación.
Mediante el uso de la fórmula de rotación de Rodrigues en forma de matriz, con θ = θ⁄2 + θ⁄2, y junto con las fórmulas del ángulo doble, se obtiene
![{\displaystyle {\begin{aligned}\exp(A)&{}=\exp(\theta ({\boldsymbol {u\cdot L}}))=\exp \left(\left[{\begin{smallmatrix}0&-z\theta &y\theta \\z\theta &0&-x\theta \\-y\theta &x\theta &0\end{smallmatrix}}\right]\right)={\boldsymbol {I}}+2\cos {\frac {\theta }{2}}\operatorname {sen} {\frac {\theta }{2}}~{\boldsymbol {u\cdot L}}+2\operatorname {sen} ^{2}{\frac {\theta }{2}}~({\boldsymbol {u\cdot L}})^{2},\end{aligned}}}](../I/36b6d3829651d2bda76e0234b252a28f8f62165b.svg)
donde c = cos θ⁄2 s = sen θ⁄2
Esta es la matriz para una rotación alrededor del eje u según el ángulo θ en forma de medio ángulo. Para detalles completos, véase el artículo dedicado a la aplicación exponencial SO (3).
Debe tenerse en cuenta que para ángulos infinitesimales, los términos de segundo orden pueden ignorarse y establecer que exp(A) = I + A
Véase también
- Distancia angular
- Velocidad angular
- Rotación infinitesimal
- Elasticidad lineal
- Segundo momento de área
Notas
- Nótese que esta aplicación exponencial entre matrices antisimétricas y matrices de rotación es bastante diferente de la transformación de Cayley analizada anteriormente, diferenciándose en el término de tercer orden, Análogamente, una matriz antisimétrica A especificando una matriz de rotación según la aplicación de Cayley, describe la misma matriz de rotación según la aplicación exp(2arctanhA).

Referencias
- Kleppner, Daniel; Kolenkow, Robert (1973). An Introduction to Mechanics. McGraw-Hill. pp. 288–89.
- En el espacio euclídeo
- (Goldstein, Poole y Safko, 2002, §4.8)
- (Wedderburn, 1934)
| Control de autoridades |
|
|---|
 Datos: Q3305038
Datos: Q3305038