Théorie de Morse
En mathématiques, et plus précisément en topologie différentielle, la théorie de Morse est un ensemble de techniques et de méthodes mises en place durant la seconde moitié du XXe siècle, permettant d'étudier la topologie d'une variété différentielle en analysant les lignes de niveau d'une fonction définie sur cette variété. Le premier résultat d'importance est le lemme de Morse, qui donne le lien entre points critiques d'une fonction suffisamment générale et modification de la topologie de la variété. L'homologie de Morse systématise cette approche. Parmi les résultats les plus remarquables de la théorie de Morse doivent être mentionnés les inégalités de Morse (estimation du nombre de points critiques), et le théorème du h-cobordisme (en) (étudiant la relation de cobordisme entre variétés).
Cette branche des mathématiques porte le nom du mathématicien américain Marston Morse.
« Pour ceux qui voient dans la mathématique une construction bien réglée, s'ordonnant logiquement selon une taxonomie bien établie, la théorie de Morse pose un problème. Elle touche à l'Analyse (au calcul des variations, à l'Analyse fonctionnelle), à l'analyse différentielle locale (théorie des singularités de fonctions), à la topologie globale (topologie différentielle et algébrique des variétés). Mais elle n'appartient en propre à aucune de ces disciplines ; elle est strictement inclassable ; sise à l'origine de presque tous les grands courants de la mathématique récente, elle domine, tel un énigmatique monolithe, une bonne part du paysage mathématique contemporain. Ce monolithe, nous n'avons pas fini de l'interroger. » - René Thom (1977)
Principe
Reconstruction d'un tore
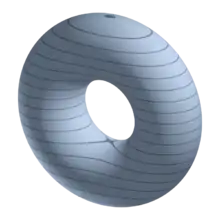
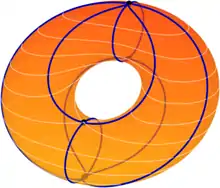
Une des illustrations les plus simples des idées générales de la théorie de Morse est la « reconstruction » d'un tore à partir de la fonction hauteur. Soit donc un tore M (surface ayant la forme d'une chambre à air), posé verticalement. Soit h l'application qui à un point du tore associe sa coordonnée dans la direction verticale (la hauteur).
Pour des valeurs de z de plus en plus grandes on procède à la description de la partie de la surface qui est de hauteur inférieure à z. Cette partie est appelée le sous-niveau de hauteur z :


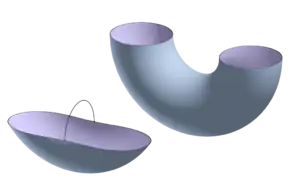
Dans cette description, quatre points particuliers vont jouer un rôle. Ils portent le nom de points critiques pour la fonction hauteur. Ce sont les points de hauteur minimale et maximale d'une part, et deux autres points qualifiés de « point-selle » ou « point col » d'autre part. L'aspect du tore à la proximité du point selle le plus bas est donné par la figure ci-contre. Il se caractérise par la présence de directions montantes et descendantes lui donnant effectivement la forme d'un col.
Description des sous-niveaux successifs
|
- Pour z strictement inférieur à la hauteur du minimum, le sous-niveau Mz est vide.
- Pour z légèrement supérieur à cette valeur, le sous-niveau prend la forme d'une calotte.
- Lorsque z augmente, le sous-niveau ne change pas de nature topologique jusqu'à atteindre la hauteur du premier point selle.
- Dépasser légèrement la hauteur du premier point selle modifie le sous-niveau, qui devient cylindre. À homotopie près cette modification revient à ajouter une « anse » à la calotte précédente.
- De nouveau le type topologique ne change pas quand l'altitude est modifiée, jusqu'au deuxième point selle.
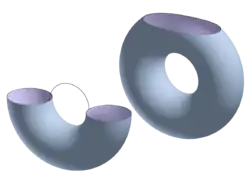
- Encore une fois, franchir le point selle modifie le type topologique, et revient à ajouter une nouvelle anse au cylindre (on obtient un tore percé).
- Atteindre la hauteur maximum permet de finir la figure en rajoutant un disque pour fermer le tore.
Règles de reconstruction
La règle qui semble se dégager est que lorsque l'altitude z varie, la topologie du sous-niveau Mz reste inchangée tant que z évolue entre deux valeurs critiques. Le franchissement d'un niveau critique engendre une modification de la topologie par ajout d'un élément (point, droite, disque…) qui dépend directement de la nature du point critique. Cette règle doit en fait être amendée pour tenir compte de deux phénomènes « exceptionnels » :
- il se peut que plusieurs points critiques soient situés à la même altitude ;
- la modification de topologie ne se décrit simplement que pour les points critiques non dégénérés.
Formalisation de la théorie
La théorie de Morse s'applique à une fonction différentiable réelle f sur une variété différentielle M. Les points critiques de f sont les points où la différentielle de f s'annule, les valeurs critiques sont les valeurs prises par f en ces points. En chacun des points, il est possible de définir le hessien de f comme une forme quadratique sur TxM. Le point critique x est dit non dégénéré lorsque le hessien correspondant est une forme quadratique non dégénérée. L'indice de x est défini comme la dimension du plus grand sous-espace défini négatif.
Les lignes de gradient
Les lignes de gradient sont un outil adapté à la comparaison des sous-niveaux entre eux. Dans le cas de la "fonction hauteur" donnée en exemple, il s'agirait des lignes de plus grande pente tracées sur le tore. Pour les définir en général, il faut munir la variété d'une métrique riemannienne. Il est alors possible d'introduire le champ de vecteurs gradient ∇f de la fonction f. Les lignes de gradient de f sont les courbes intégrales de ce champ de vecteurs, c'est-à-dire les solutions de l'équation différentielle :

Les lignes de gradient sont orthogonales aux hypersurfaces de niveau, définies par l'équation f = constante. Sur une variété riemannienne compacte sans bord (M, g), le champ de gradient est globalement intégrable, c'est-à-dire que toutes les lignes de gradient sont définies sur tout ℝ.
Évolution des sous-niveaux
Les sous-niveaux Mz de la fonction f sont définis comme précédemment. Les deux théorèmes suivants permettent de comparer les sous-niveaux entre eux.
Théorème : description des zones sans point critique
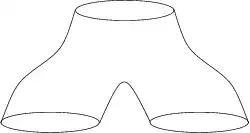
Si a < b, et si f−1([a, b]) est compact sans point critique, alors Ma et Mb sont des variétés à bord difféomorphes.
Plus précisément, la partie ajoutée à Ma pour obtenir Mb, qui ressemble à une jambe de pantalon, peut être décrite en suivant les lignes de gradient de la fonction f. Cette partie est difféomorphe au produit [a, b]×f−1({a}) et, toujours en suivant ces lignes de gradient, Mb se rétracte par déformation sur Ma.
Théorème : passage d'un point critique
Soit p un point critique non dégénéré de f d'indice d' et q = f(p) la valeur critique correspondante. On suppose que a < q < b et que f−1([a, b]) est compact. On suppose enfin que p est le seul point critique correspondant à la valeur q. Alors, pour ε assez petit, Mq+ε est homotopiquement équivalent à Mq-ε auquel on ajoute une d-cellule.
Fonctions de Morse
Une fonction de Morse f est une fonction de classe C2 à valeurs réelles dont tous les points critiques sont non dégénérés. Selon un résultat de René Thom[1], si la variété M est compacte sans bord, les fonctions de Morse constituent un ouvert dense de l'espace de Fréchet Ck(M, ℝ) des fonctions de classe Ck sur M, et ce pour toute classe de régularité k ≥ 2. Le résultat s'étend partiellement aux variétés compactes avec bord avec les précautions qui s'imposent. Autrement dit, une fonction générique est de Morse.
Sur une variété riemannienne compacte sans bord (M, g), les lignes de gradient admettent des limites en ±∞, limites qui sont des points critiques distincts de f. Sous une hypothèse de généricité pouvant porter sur f ou sur g, leurs indices sont décroissants. On dit alors que les lignes du gradient de f vont d'un point critique à un autre par indice décroissant. En chaque point critique a d'indice k, on peut distinguer les lignes qui aboutissent à ce point critique, et celles qui en sont issues. La réunion des premières forme une sous-variété de M, difféomorphe à ℝk, appelée variété stable du point a. Ainsi la variété M apparaît comme la réunion des variétés stables de ses différents points critiques, ce qui en donne une décomposition en k-cellules pour différentes valeurs de k.
La variété instable en a est définie de même comme réunion des lignes de gradient originaires de a. Toujours pour un point d'indice k, elle est difféomorphe à ℝn–k.
Théorème du h-cobordisme
Deux variétés différentielles compactes sans bord M et N de même dimension n sont dites en cobordisme lorsqu'il existe une variété différentielle compacte X, de bord la somme disjointe de M et de N. La variété X est dite réaliser un cobordisme entre M et N. L'existence d'un tel cobordisme ne dépend que de la classe d'isomorphisme de M et de N. De fait, le cobordisme peut être regardé comme une relation d'équivalence sur l'ensemble des variétés différentielles de dimension n à difféomorphisme près.
Le théorème du h-cobordisme permet de construire par récurrence et à difféomorphisme près toutes les variétés en cobordisme avec une variété différentielle compacte M donnée.
Référence
- R. Thom, « Les singularités des applications différentiables », Annales de l'Institut Fourier, vol. 6, 1956, p. 43-87 [lire en ligne].
Voir aussi
Articles connexes
- Homologie de Floer
- Théorie de Morse discrète (en)
- Analyse globale
- Théorie de Picard-Lefschetz
Bibliographie
- François Laudenbach, Transversalité, Courants et Théorie de Morse - Un cours de topologie différentielle, Éditions de l'École polytechnique, 2011
- (en) John Milnor, Morse Theory, Princeton University Press, 1963 (ISBN 0-691-08008-9)
- (en) Yukio Matsumoto, An Introduction to Morse Theory, 2002
- (en) Marston Morse, The Calculus of Variations in the Large, AMS, coll. « Colloquium Publications » (no 18), New York, 1934
 Portail des mathématiques
Portail des mathématiques