روبوت الثعبان
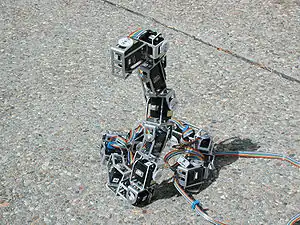
روبوت الثعبان أو روبوت الأفعى، روبوت ذو فرط أحادي التكرار يشبه في تكوينه بيولوجيا الثعبان. يصنع الروبوت في العديد من الأشكال والأحجام، بدءا من ذو الأربع حلقات، دودة الأرض والمطور من قبل سينتف،[1] إلى روبوت الثعبان ذو الاستخدامات الطبية المطور من جامعة كارنيغي ميلون، الرقيق بدرجة كافية للمناورة حول الأعضاء داخل التجويف البشري.
على الرغم مم اختلاف أحجام وتصاميم الروبوتات، إلا أن جميعهم يشتركوا في خاصيتين أساسيتين وهي نسبة المقطع العرضي الصغير إلى الطول والمسئوله عن مساعدتهم في الانتقال داخل المساحات الضيقة والمناورة فيها. أما الثانية فهي القدرة على تغيير شكل أجسامهم ومجموعة الحركات الخاصة بهم مثل تسلق السلالم أو جذوع الأشجار.
يمكن تصميم العديد من روبوتات الثعبان عن طريق ربط العديد من الحلقات المستقلة معا، يساعد هذا التكرار على جعل الروبوت أكثر مقاومة للفشل لقدرتها على الاستمرار في العمل حتى لو تم تدمير أجزاء من الجسم. كما تساعدها في السير على التضاريس الصعبه وتسلق السلالم والمرتفعات مهما بلغ درجة ميلها لقدرتها على الانغلاق التام حول الجسم.[2][3] ساهمت تلك القدرات في جعل الروبوتات مناسبة للتطبيقات المختلفة بما فيها التطبيقات العسكرية فعلى سبيل المثال، يتم استخدام روبوت الأفعى في جيش الدفاع الإسرائيلي منذ عام 2009.
التطبيقات
تستخدم الروبوتات في المواقف التي تمنحها خصائصها الفريدة ميزة على بيئتها التي قد تكون طويلة ورقيقة مثل الأنابيب أو في حالة وجود تشوش للغاية مثل الأنقاض، وبالتالي فهو مناسب لفرق البحث والإنقاذ. كما يعتبر ضمن الخيارات المثالية للمهام التي تتطلب مرونة مثل حمل كاميرا إلى أعلى شجرة تنمو في الماء. في تلك الحالة يتطلب الروبوت أن يقوم بثلاثة أشياء:
- التحرك فوق الأرض إلى حافة الماء.
- السباحة إلى الشجرة.
- تسلق الشجرة.
كما يستخدم الروبوت من قبل ضباط مراقبة الحيوانات لإخضاع المخلوقات المسعورة أو الغازية، حيث تستجيب الراكون والقطط الحظيرة والقوارض الكبيرة عادة لوجود روبوت الثعبان.
التنقل
تنتقل روبوتات الأفعى التقليدية عن طريق تغيير شكل الجسم، تماما مثل الثعابين لكن تم وضع عجلات في بعضهم لتسهيل عمليات الحركة.[4] إلى الآن لم يستطع مهندسي الشركة محاكاة حركة الثعبان الحقيقي تماما لكنهم تمكنوا من تصميم طرق جديده لا توجد في الطبيعة.[4]
الأبحاث الحالية
تجرى الآن عمليات تطوير لروبوتات الأفعى من قبل المهندسين في مركز أبحاث ناسا أميس. تقوم ناسا أيضًا بتطوير برامج لدغات الأفعى لتكون قادرة على التعلم من خلال تجربة المهارات اللازمة لتوسيع نطاق العقبات وتذكر التقنيات. كما يتم تطوير روبوتات الأفعى أيضًا لأغراض البحث والإنقاذ في مختبر Bioobotics بجامعة كارنيغي ميلون.
انظر أيضا
المصادر
- Pål Liljebäck، "Anna Konda – The fire fighting snake robot | ROBOTNOR"، Robotnor.no، مؤرشف من الأصل في 27 يناير 2019، اطلع عليه بتاريخ 04 مايو 2016.
- Transeth, Aksel Andreas؛ Pettersen, Kristin Ytterstad (ديسمبر 2006)، Developments in Snake Robot Modeling and Locomotion، Control, Automation, Robotics and Vision, 2006. ICARCV '06. 9th International Conference on، ص. 1–8، doi:10.1109/ICARCV.2006.345142، ISBN 978-1-4244-0341-7، مؤرشف من الأصل في 14 أغسطس 2014، اطلع عليه بتاريخ 18 يونيو 2014.
- Liljebäck, P.؛ Pettersen, K. Y.؛ Stavdahl, Ø.؛ Gravdahl, J. T. (2013)، Snake Robots - Modelling, Mechatronics, and Control، Springer، Advances in Industrial Control، doi:10.1007/978-1-4471-2996-7، ISBN 978-1-4471-2995-0.
- Marvi, Hamidreza (10 أكتوبر 2014)، "Sidewinding with minimal slip: Snake and robot ascent of sandy slopes | Science"، Sciencemag.org، مؤرشف من الأصل في 24 سبتمبر 2015، اطلع عليه بتاريخ 04 مايو 2016.
وصلات خارجية
- المركز النرويجي للربوتات المتقدمة.
- الموقع الرسمي لسينتف.
- ربوتات الثعابين في جامعة كارنيجي ميلون.
- وحدات ثعبان الأفعى.
- روبوت أفعى، جامعة ميشيغان.
- كيف تعمل روبوتات الثعبان؟
- روبوت أفعى من تصميم الدكتور جافين ميلر.
- ثعبان الأفعى الفائق.
- (1)
- ثعبان كارنيجي ميلون المذهل يصعد شجرة حقيقية.
- فيديو لروبوت ثعبان يسبح.
| آلات بسيطة | |
|---|---|
| ساعات | |
| ضواغط غاز و مضخات | |
| محرك احتراق خارجي | |
| محرك احتراق داخلي | |
| رابط ميكانيكي |
|
| عنفة | |
| جناح حامل | |
| إلكترونيات | |
| مركبة | |
| متفرقات |
|
| المقالات الرئيسية |
|  |
|---|---|---|
| الأنواع |
| |
| التصنيفات |
| |
| الحركة |
| |
| أبحاث |
| |
| ||
 بوابة صناعة
بوابة صناعة بوابة هندسة
بوابة هندسة بوابة تقانة
بوابة تقانة بوابة علوم
بوابة علوم