Programme Surveyor
Le programme Surveyor de la NASA est un programme d'exploration de la Lune par des engins automatiques qui a joué un rôle important dans la préparation des missions du programme Apollo. En 1960, le Jet Propulsion Laboratory (JPL) lance officiellement un projet d'étude scientifique de notre satellite qui doit mettre en œuvre une sonde spatiale capable d'effectuer un atterrissage sur le sol lunaire pour l'étudier in situ.
Sondes spatiales ( Lune )

| Organisation |
|
|---|---|
| Constructeur |
|
| Programme | Surveyor |
| Domaine | Étude in situ de la Lune |
| Type de mission | Atterrisseur |
| Nombre d'exemplaires | 7 |
| Statut | Missions terminées |
| Lancement | 1966-1968 |
| Lanceur | Atlas-Centaur |
| Protection planétaire | Catégorie II[1] |
| Masse au lancement | 995-1 036 kg |
|---|---|
| Propulsion | Solide/Liquide |
| Δv | 2,7 km/s (rétrofusée) |
| Contrôle d'attitude | Stabilisé sur 3 axes |
| Source d'énergie | Panneau solaire |
| Puissance électrique | 90 W |
Les responsables de la NASA orientent ce projet en 1961 pour en faire un programme de reconnaissance afin de préparer le débarquement de l'homme sur la Lune. Plusieurs sondes Surveyor sont programmées avec désormais comme objectif principal la mise au point d'une méthode d'atterrissage en douceur ainsi que l'étude du sol lunaire et de sa topographie. La Lune est à l'époque mal connue et les scientifiques n'ont pas de certitude sur la consistance du sol lunaire. Il est impératif de connaître ce paramètre pour valider la conception du train d'atterrissage des modules lunaires Apollo.
Le JPL conçoit une sonde spatiale de type atterrisseur dont la fabrication est confiée à la société Hughes Aircraft. Le projet rencontre de nombreux problèmes : surcoûts, impasses techniques et révisions dramatiques du cahier des charges. Les sondes Surveyor sont, pour l'époque, des engins complexes et innovants : il s'agit des premières sondes spatiales conçues pour se poser en douceur sur un autre corps céleste. Construites autour d'un treillis de tubes en aluminium qui leur donne une apparence arachnéenne, elles nécessitent la mise au point de plusieurs dispositifs électroniques et moteurs innovants : une grosse rétrofusée aux performances remarquables, des moteurs verniers à poussée modulable, deux radars dont les données sont utilisées par un système d'atterrissage automatique qui doit être capable de poser la sonde sur un terrain aux caractéristiques inconnues. Ces sondes de près d'une tonne sont bien plus lourdes que les véhicules spatiaux américains qui les ont précédées et qui ne dépassent pas 300 kg. Lorsque le programme débute, il n'existe pas de lanceur américain assez puissant pour lancer une telle masse ; la NASA choisit d'utiliser le lanceur Atlas associé à un étage Centaur en cours de développement ; celui-ci inaugure l'utilisation de l'hydrogène liquide qui permet de tripler les performances du lanceur Atlas-Agena utilisé jusque-là. Mais sa mise au point est beaucoup plus longue que prévu et le premier lancement d'une sonde Surveyor, initialement programmé pour 1963, n'a lieu qu'en 1966.
Entre 1966 et 1968, sept sondes Surveyor sont lancées parmi lesquelles cinq remplissent leur mission avec succès. Elles fournissent des informations rassurantes sur les propriétés mécaniques du sol lunaire qui se révèle apte à supporter le module lunaire Apollo. Par contre, les retombées scientifiques du programme sont limitées car les nombreux instruments scientifiques prévus initialement ne sont pas installés faute d'un étage Centaur suffisamment puissant. La caméra présente sur toutes les sondes permet néanmoins de prendre plus de 87 000 photos du sol lunaire et les trois dernières sondes emportent un instrument qui permet d'analyser la composition chimique du sol. Compte tenu de la complexité de la mission assignée aux sondes et malgré les retards et les surcoûts, le programme est considéré comme une réussite du programme spatial américain.
Le programme Surveyor consistant à construire et à lancer 7 sondes spatiales Surveyor vers la Lune coûte au total 469 millions de dollars américains.
Contexte
Le programme Surveyor est lancé au tout début de la conquête spatiale alors qu'une compétition dont les enjeux sont essentiellement politiques s'est engagée entre l'Union soviétique et les États-Unis.
La course à l'espace
Lorsque le programme Surveyor est officiellement lancé en 1960, il s'est écoulé moins de trois ans depuis que l'Union Soviétique a placé en orbite le premier satellite artificiel nommé Spoutnik 1. La guerre froide entre les États-Unis et l'Union soviétique bat son plein et les deux pays tentent de multiplier les premières spatiales pour prouver la supériorité de leur système politique. Dans cette course à l'espace, les Soviétiques disposent de deux avantages : ils ont démarré leur programme spatial plus tôt et surtout leurs lanceurs, dérivés comme ceux des Américains de missiles balistiques porteurs de charges nucléaires, sont beaucoup plus puissants car ils sont conçus pour porter des bombes atomiques aux dimensions plus importantes que les bombes nucléaires américaines[2] : dès 1960, l'Union Soviétique dispose du lanceur Molnia capable de lancer vers la Lune une sonde spatiale de 1,5 tonne[3] alors que le lanceur concurrent américain, l'Atlas-Agena, ne peut lancer que 300 kg vers la même destination.
Les premières missions spatiales vers la Lune

L'exploration de la Lune, corps céleste le plus accessible depuis la Terre, figure dans les objectifs des programmes spatiaux des deux pays. L'URSS réussit dès à lancer la sonde spatiale Luna 1 qui effectue le premier survol de la Lune ; en octobre de la même année, Luna 3 parvient à photographier la face cachée de notre satellite. Les premières sondes américaines du programme Pioneer (1958-1960) qui poursuivent le même objectif sont victimes d'une série de défaillances[4]. Le programme Ranger (1960-1963) prend le relais avec des sondes plus complexes permettant d'effectuer des photos de la Lune mais ne connaît ses premiers succès qu'en 1963 après six échecs consécutifs. Le développement d'une deuxième génération de sondes interplanétaires américaines démarre au début des années 1960 avec le programme Mariner qui doit permettre d'explorer les planètes inférieures du Système solaire (Terre, Vénus, Mercure) tandis que le programme Surveyor est chargé d'effectuer des investigations scientifiques de la Lune après un atterrissage en douceur sur son sol[5].
La Lune : un satellite mal connu
À l'époque où les premières sondes spatiales sont lancées vers la Lune, ce satellite naturel de la Terre, pourtant proche, garde une grande part de mystère. L'origine des cratères - cratère d'impact ou cratère volcanique - qui parsèment sa surface ne fait pas l'unanimité : certains rejettent encore l'idée que ceux-ci aient été créés par l'impact de météorites, une théorie élaborée quelques années auparavant[N 1]. Le mode de formation des mers lunaires est également l'objet de controverses. La communauté scientifique est à peu près unanime sur le fait qu'elles sont constituées par de la lave mais il y a divergence sur son origine : volcanisme ou impact de météorite[6]. Il existe d'autres explications comme celle avancée par l'astronome Thomas Gold qui est largement diffusée dans les médias à la grande fureur du milieu scientifique : pour Gold, les mers sont formées par l'accumulation de débris produits par l'érosion des cratères et des parties les plus élevées de la surface lunaire ; cette poussière, prédit-il plus tard, va engloutir les sondes et les vaisseaux qui se poseront sur le sol lunaire[7]. Certains chercheurs, comme le lauréat du prix Nobel de chimie Harold Clayton Urey, pensent que contrairement à la Terre, la Lune n'est pas une planète différenciée et qu'elle est constituée du matériau primitif présent à la formation du Système solaire (théorie de la Lune froide)[8]. Le sol lunaire intrigue également car les observations effectuées depuis la Terre avec des instruments dans des bandes allant des rayons X aux ondes radio indiquent une grande porosité du matériau de surface qui est nommé plus tard « régolithe[9] ». Enfin, on ne dispose, à l'époque, que de quelques mauvaises photographies de la face cachée de la Lune prises par la sonde soviétique Luna 3.
Historique
Le lancement du programme
Au printemps 1960, le développement du programme Surveyor est officiellement lancé et confié par la NASA à son laboratoire de recherche, le Jet Propulsion Laboratory (JPL) situé à Pasadena en Californie.
Le Jet Propulsion Laboratory
Le Jet Propulsion Laboratory (JPL) est un laboratoire créé par le California Institute of Technology (CalTech) et administré par celui-ci. Après avoir été un établissement de l’Armée de terre américaine (US Army) de 1943 à 1958, il fait partie des centres qui sont placés sous la direction de la NASA lorsqu'elle est créée en 1958. Le JPL a forgé son expérience dans le domaine spatial en développant durant la Seconde Guerre mondiale les JATO (Jet-Assisted Take-Off) puis en concevant dans les années 1950 les missiles tactiques Sergeant et Corporal. Le JPL pose sa candidature en 1955 pour fournir le premier lanceur américain en association avec l'Agence des missiles balistiques (ABMA) de l'Armée de terre américaine de Huntsville (Alabama) dirigée par Wernher von Braun mais il échoue au profit du projet Vanguard proposé par le laboratoire de la Marine américaine (US Navy). Il fournit toutefois le premier satellite artificiel du pays, Explorer 1. Le JPL, dont le domaine de compétence au sein de la NASA est l'exploration du Système solaire, s'est également vu confier les programmes des sondes spatiales Ranger et Mariner. Son statut très particulier[N 2] lui donne une grande autonomie vis-à-vis des dirigeants de l'agence spatiale. Lors des premières discussions en 1959 sur les programmes futurs, les dirigeants du JPL tentent de remettre en question la priorité accordée par la direction de la NASA au programme d'exploration de la Lune. Fiers de leurs réalisations, le personnel du JPL et ses dirigeants souhaitent conserver le mode de fonctionnement hérité des projets passés qui reposent notamment sur des structures légères et un recours limité à la sous-traitance[10],[11],[12].
Les objectifs du programme Surveyor
.jpg.webp)
Le programme Surveyor a pour objectif initial de développer deux engins spatiaux : un orbiteur qui doit étudier la Lune depuis l'orbite lunaire et un atterrisseur qui doit se poser en douceur sur la Lune pour une étude in situ. Cette configuration sera reprise pour le programme Viking[13]. Il est prévu que les deux sondes spatiales comportent des organes communs[14]. Selon les plans initiaux du JPL, sept atterrisseurs destinés à valider la technique d'atterrissage doivent d'abord être lancés avant de laisser la place à 13 atterrisseurs « scientifiques » chargés de 160 kg d'instruments dont trois caméras, des sismomètres, spectromètres, foreuses, un laboratoire pour analyser les échantillons[15]... À la demande de la direction de la NASA, le JPL accepte avec réticence de renoncer à développer en interne les sondes et de lancer un appel d'offres pour sous-traiter la conception détaillée, la fabrication et les tests de l'atterrisseur[16]. Une consultation auprès de quatre constructeurs[N 3] est lancée en [17] ; la proposition du constructeur Hughes Aircraft est retenue en . Selon le cahier des charges établi par le JPL, la future sonde doit peser 1 125 kg après séparation avec son lanceur et 320 kg à l'atterrissage sur la Lune. Elle doit emporter 114 kg d'instruments scientifiques et doit de plus permettre de valider une méthode d'atterrissage en douceur sur le sol lunaire. Il est prévu que la sonde fonctionne au minimum durant la période éclairée d'une journée lunaire. Le premier vol est planifié pour 1964[18]. Compte tenu de sa masse, la sonde doit être lancée par un lanceur Atlas comportant un deuxième étage Centaur en cours de développement qui seul permet de lancer vers la Lune une telle masse. L'étage Centaur inaugure l'utilisation de l'hydrogène liquide qui doit permettre de tripler les performances du lanceur Atlas-Agena utilisée jusque-là pour les missions interplanétaires.
En 1961, les objectifs du programme Surveyor sont modifiés pour inclure les opérations de reconnaissance nécessaires au programme Apollo. Les sondes Surveyor doivent permettre de valider la technique d'atterrissage en douceur sur la Lune et l'architecture du train d'atterrissage qui seront mis en œuvre par le futur module lunaire Apollo[19]. Il est en effet nécessaire de vérifier que les hypothèses de résistance du terrain sont conformes aux prévisions des responsables du programme Apollo : ceux-ci indique en 1962 au constructeur du module lunaire que le sol lunaire est capable de supporter une charge de 8,4 N/cm2 avec un enfoncement limité à 15 cm. En 1964, la NASA raffine ces contraintes en prenant l'hypothèse qu'une pression statique de 0,7 N/m2 exercée sur le sol lunaire ne doit pas conduire à un enfoncement de plus de 10 cm et qu'une charge dynamique de 8,4 N/cm2 n'entraînerait pas un enfoncement supérieur à 30 cm[20]. En 1962, le JPL doit à la fois faire face aux échecs de ses sondes Ranger et aux problèmes soulevés par la conception de l'atterrisseur Surveyor. Les dirigeants de la NASA décident de développer l'orbiteur dans le cadre d'un programme distinct : le programme Lunar Orbiter est confié au Centre de recherche de Langley[13]. La construction de l'orbiteur donne lieu à un appel d'offres qui est remporté en 1963 par Boeing[19].
Une sonde complexe
L'atterrisseur Surveyor est beaucoup plus complexe à développer que les sondes spatiales qui l'ont précédé. Plusieurs composants entièrement nouveaux doivent être mis au point pour permettre l'atterrissage en douceur et, malgré le recours à l'étage Centaur, les ingénieurs peinent à rester en dessous de la masse maximale autorisée. La rétrofusée chargée d'annuler la plus grande partie de la vitesse de la sonde à l'approche de la Lune n'est pas une nouveauté car un engin semblable a été développé auparavant pour les sondes Ranger mais c'est à cette époque le propulseur à propergol solide le plus performant, tout en étant très compact pour ne pas allonger la coiffe du lanceur et alourdir celui-ci. Les trois moteurs verniers chargés de la phase finale de l'atterrissage sont également développés spécifiquement pour Surveyor. Ils se caractérisent par une poussée modulable et même orientable pour l'un d'entre eux, ce qui en fait des engins complexes malgré leur puissance modeste. La partie la plus originale de la sonde est le système de radar Doppler chargé de contrôler la descente en fournissant l'altitude et les vitesses horizontale et verticale au calculateur qui pilote en retour l'action des moteurs verniers pour permettre à la sonde de se poser en douceur. Le train d'atterrissage doit être développé sans disposer de données précises sur la consistance du sol lunaire et les obstacles présents à la surface. La sonde hérite par contre des techniques mises au point pour les sondes Mariner et Ranger développées à la même époque, telles que la stabilisation sur 3 axes, le viseur d'étoiles et la structure tubulaire[16],[21].
Le développement de l'étage Centaur en difficulté

Toutes les sondes interplanétaires américaines contemporaines (Mariner, Lunar Orbiter, Ranger) ont une masse inférieure à 350 kg qui leur permet d'être lancées par les lanceurs américains existants. La réussite du programme Surveyor est liée à l'aboutissement du développement de l'étage Centaur qui lui seul permet à l'ensemble Atlas-Centaur de propulser la sonde de plus d'une tonne vers sa destination lunaire. L'étage supérieur Centaur met pour la première fois en œuvre le couple d'ergols hydrogène liquide-oxygène liquide, très performant mais également très difficile à maîtriser. Ce projet, dont les débuts remontent à 1958, accumule les retards : le premier exemplaire décolle pour un essai en (AC-1) mais c'est un échec. L'affaire est jugée suffisamment grave pour déclencher une enquête du Congrès des États-Unis. Compte tenu des résultats obtenus jusque-là, les performances de l'étage Centaur sont revues à la baisse avec d'importantes conséquences pour la sonde Surveyor : la masse maximale de celle-ci doit passer de 1 125 kg à 975,2 kg ce qui réduit mécaniquement la masse de la charge utile à 28,6 kg contre 114 kg à l'origine. En , après de nombreux débats entre différentes factions internes, la NASA décide de renoncer aux Surveyor « scientifiques » : la sonde n'est désormais plus qu'un engin de reconnaissance technologique au service du programme Apollo. Entre 1963 et 1965, plusieurs tentatives de réintégrer une instrumentation scientifique complète sont effectuées ; un temps, il est même envisagé que la sonde emporte un petit rover de 45 kg capable de parcourir 1,6 km et chargé d'effectuer un relevé systématique du terrain grâce à un pénétromètre et une caméra. Mais toutes ces tentatives - il y a 101 modifications consécutives de la configuration de départ - échouent[22],[15],[23].
Pour assurer une gestion plus efficace du projet Centaur, la supervision du développement est confiée fin 1962 au Centre spatial Lewis. Le projet passe en priorité nationale en , ce qui lui garantit une meilleure qualité de service de la part des sous-traitants. Pour limiter les risques, le responsable du Centre spatial Lewis, Abe Silverstein, supprime la possibilité de rallumer le moteur sur la première version de l'étage, ce qui représente un casse-tête technique avec l'utilisation de l'hydrogène liquide. L'équipe chargée du développement de la sonde Surveyor s'oppose fermement à cette décision mais en vain. Cette restriction implique que les lancements effectués sur l'année ne peuvent être recalés en orbite et sont susceptibles d'aboutir à un atterrissage sur la Lune durant la période nocturne, une opération qui risque de compromettre le fonctionnement de la sonde. Les essais extensifs et l'implication des acteurs du projet permettent de résoudre un grand nombre de problèmes techniques qui n'ont parfois pas été détectés jusque-là[23]. Après un lancement réussi le du vol Atlas-Centaur 2 (AC-2), les échecs s'accumulent soit du fait du premier étage Atlas (AC-3 le , AC-5 le ) soit de celui de l'étage Centaur (AC-4 le , AC-8 le ). Les ingénieurs de la NASA découvrent en effectuant des essais au sol, qu'en impesanteur l'hydrogène liquide se plaque le long des parois et que les évents, réagissant mal, libèrent à la fois les gaz résultant de l'évaporation progressive de l'hydrogène ainsi que de l'hydrogène liquide créant un couple de forces à l'origine de mouvements incontrôlés du lanceur. Une solution est trouvée mais le projet s'attire pour la deuxième fois les foudres de représentants du Congrès et de la presse américaine[24].
La direction du JPL remise en question
Dès son lancement, le programme Surveyor souffre d'un encadrement trop léger au sein du JPL compte tenu de sa complexité qui est mal évaluée par les responsables. Il y a également une certaine désaffection du personnel pour ce projet développé principalement par une société extérieure, contrairement aux habitudes du centre spatial. Les changements majeurs intervenus en cours de développement dans le cahier des charges et les problèmes récurrents du lanceur finissent par mettre le programme en difficulté[25]. La situation est particulièrement grave en 1964. Devant les problèmes rencontrés par le fabricant des moteurs verniers, le JPL décide, à contrecœur, compte tenu de l'avancement du projet, de se tourner vers un autre constructeur. Alors qu'un nouveau fournisseur est désigné, le premier contractant parvient à redresser la barre. La mise au point du système de mesure de vitesse par Doppler et du radar altimètre rencontrent d'importantes difficultés techniques. Ce dernier doit en effet piloter l'ensemble des manœuvres de la phase d'atterrissage ce qui n'a jusque-là jamais été réalisé ; ce type de système, qui permet à un hélicoptère d'atterrir sans visibilité, n'est d'ailleurs toujours pas généralisé aux engins terrestre 20 ans plus tard. Deux essais réalisés avec des copies grandeurs réelles de la sonde adaptés à la gravité terrestre pour qualifier le système d'atterrissage en douceur se soldent par la destruction des sondes[16].
Ces problèmes se cumulent avec les échecs répétés des sondes spatiales du programme Ranger également géré par le JPL. Les dirigeants de la NASA demandent à plusieurs reprises au responsable du JPL, William Hayward Pickering, de réformer son organisation et de mieux prendre en considération les alertes remontées par le siège. Le programme est désormais sur le chemin critique du programme Apollo car les données que les sondes doivent collecter sur le sol lunaire peuvent amener des modifications dans la conception du module lunaire Apollo qui doit déposer les astronautes sur la Lune. La NASA envisage le remplacement de Pickering et la suppression des versements à Caltech, à qui l'agence spatiale demande en vain d'assumer ses responsabilités. Le renforcement de l'équipe du projet et la mise en place de procédures permettent d'aplanir progressivement les problèmes[26].
Le lancement de la première sonde Surveyor
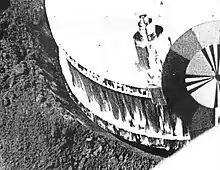
Le , les Soviétiques parviennent à poser en douceur la sonde Luna 9 sur le sol lunaire. Elle réalise la première photographie panoramique du site d'atterrissage grâce à un miroir tournant lentement autour de la caméra. Au bout de trois jours la sonde s'éteint après avoir épuisé son accumulateur. La sonde Luna est beaucoup plus rudimentaire que la sonde Surveyor mais l'astronautique soviétique vient une nouvelle fois de réussir une première avant son homologue américain[27]. Quatre mois plus tard, le , le lanceur Atlas-Centaur (AC-10) s'envole de l'aire de lancement LC-36A de la base de lancement de Cap Kennedy en emportant Surveyor 1, la première sonde opérationnelle d'une masse de 995 kg[28]. Cette mission doit principalement permettre de valider les dispositifs les plus complexes de la sonde, notamment sa capacité à effectuer des corrections de trajectoire à mi-course entre la Terre et la Lune, maintenir les télécommunications durant le vol et depuis le sol lunaire, réaliser un atterrissage contrôlé ainsi que qualifier l'étage Centaur pour le lancement de missions interplanétaires. Les objectifs secondaires sont de parvenir à obtenir des télémesures relatives au fonctionnement des différents sous-systèmes de la sonde. Les objectifs de moindres importances sont l'obtention d'images d'un des pieds du train d'atterrissage et du sol environnant après l'arrivée sur le sol lunaire, la mesure de la réflectivité radar de la surface de la Lune, de la résistance mécanique du sol et des températures[29].
La NASA doute de la réussite de la mission de Surveyor 1 car de nombreuses modifications de dernière minute sont effectuées sur la sonde[28]. D'ailleurs les quatre premières sondes, dites « Block I », emportent un équipement scientifique réduit à une caméra et des jauges chargées de mesurer les forces qui s'exercent à l'atterrissage ; pour les responsables du programme, ces sondes doivent surtout permettre la mise au point du déroulement de la mission[13]. Contre toute attente le vol du lanceur puis celui de Surveyor se déroulent sans aucune anomalie[N 4]. La sonde atterrit le dans l'océan des Tempêtes (« Oceanus Procellarum ») après avoir rebondi de quelques centimètres. Une photo d'une des semelles faiblement enfoncée dans le sol lunaire transmise immédiatement à la Terre permet de constater que la sonde n'a pas été engloutie par le régolithe comme l'avancent les plus pessimistes[28]. Ce succès inattendu suscite un important intérêt du public aux États-Unis non dénué de chauvinisme[30]. De nombreuses photographies sont prises par la caméra embarquée au cours des jours suivants avant une interruption temporaire de 2 jours pour limiter l'échauffement de l'électronique alors que le Soleil culmine au-dessus de la sonde (). Les opérations de photographie reprennent par la suite et le à la fin de la période éclairée de la première journée lunaire, 10 338 photos ont été prises et transmises. La sonde est mise en hibernation durant la longue nuit lunaire. Lorsque le Soleil réapparaît le , la sonde refuse de répondre aux commandes envoyées depuis la Terre. Le , elle se réactive et plusieurs centaines de photos sont prises par la suite. À la fin de la deuxième journée lunaire, le JPL met fin à la mission. La sonde continue de répondre aux signaux envoyés jusqu'au huitième jour lunaire, transmettant des données jusqu'au [28],[30].

Les missions Surveyor suivantes
Six missions succèdent à Surveyor 1 entre 1966 et 1968, dont quatre réussies. Le , l'Atlas-Centaur AC-7 qui emporte la sonde Surveyor 2 effectue un vol parfait mais l'un des moteurs verniers de la sonde refuse de fonctionner lors des corrections de trajectoire à mi-parcours malgré plusieurs manœuvres commandées depuis la Terre. La sonde incontrôlable s'écrase sur la Lune[31]. La sonde suivante n'est lancée que 6 mois plus tard pour permettre la mise au point d'un étage Centaur réallumable en orbite : cette version permet d'élargir la fenêtre de lancement et de disposer d'un plus grand choix de zones d'atterrissage. La mission Surveyor 3 est lancée le puis, après un transit vers la Lune et une phase d'atterrissage sans incident, réussit à se poser mais de manière peu conventionnelle : les moteurs verniers ne s'arrêtent pas comme prévu car le radar ne reçoit plus les réflexions du sol. Les moteurs verniers réagissent à chaque fois que la sonde se pose en tentant de maintenir la sonde verticale, ce qui la fait redécoller. La sonde rebondit ainsi à trois reprises sur le sol lunaire, la première fois à plus de 10 mètres de hauteur, avant que l'équipe sur Terre envoie un ordre d'extinction aux moteurs. L'explication la plus probable est que le radar d'atterrissage a été leurré par le rebord du cratère dans lequel la sonde s'est posée. Bien que faisant partie des sondes du Block I, Surveyor 3 emporte une petite pelle disponible en principe uniquement sur la version suivante mais avec un nombre de jauges plus limité ; celle-ci permet d'obtenir des informations supplémentaires sur la structure du sol lunaire[32]. La sonde Surveyor 4 est lancée le , mais le contact avec l'engin est perdu deux minutes et demie avant son atterrissage peu après la mise à feu de sa rétrofusée. Surveyor 5, lancée le , frôle l'échec : une valve défectueuse laisse s'échapper l'hélium qui permet de pressuriser le carburant des moteurs verniers. Le plan de vol est modifié dans l'urgence pour limiter le recours aux moteurs verniers et la rétrofusée est volontairement mise à feu à une altitude beaucoup plus basse que prévu. Lorsque les moteurs verniers prennent le relais, la sonde se trouve à une altitude de 1 300 mètres (au lieu de 10 km) mais la vitesse a été réduite à 30 m/s (au lieu de 150 m/s). La sonde se pose sans problème dans la Mer de la Tranquillité sur la pente à 20° d'un petit cratère à 30 km de son objectif. Surveyor 5 est la première sonde de la version Block II mieux équipée en instruments scientifiques ; elle emporte un analyseur à rayons alpha qui est utilisé avec succès pour déterminer les principaux éléments chimiques présents dans le sol environnant. Au cours de la mission, les moteurs verniers sont mis à feu durant une demi-seconde pour tester la manière dont la surface est érodée par le souffle des moteurs et en déduire certaines de ses caractéristiques mécaniques[33].
La sonde Surveyor 6 est lancée le et se pose sans encombre dans la plaine de Sinus Medii ; ce site avait été retenu successivement pour les sondes défaillantes Surveyor 2 et Surveyor 4 et devait servir de lieu d'atterrissage de rechange pour la première mission Apollo. Comme pour Surveyor 5, un test de remise à feu des moteurs verniers est réalisé mais cette fois-ci la poussée exercée est à la fois plus longue (2,5 secondes) et latérale : soulevée par la brève impulsion de ses moteurs, la sonde s'élève de 3,5 mètres tout en se déplaçant de 2,5 mètres. Les photos prises avant et après permettent de constater que les traces d'érosion du sol par le souffle des tuyères sont réduites. Une nouvelle analyse de la composition du sol par l'analyseur à rayons alpha produit des résultats comparables à ceux fournis par Surveyor 5[34]. À l'issue de la mission de Surveyor 6, tous les objectifs assignés au programme sont remplis. Les responsables du programme décident qu'ils peuvent désormais prendre un risque pour répondre aux attentes des scientifiques. Surveyor 7 est lancé le et doit se poser près du cratère Tycho dans une zone couverte de débris rocheux éjectés par l'impact à l'origine du cratère donc peu propice à un atterrissage réussi. Tycho est un cratère relativement récent qui a été choisi par les géologues parce qu'il semble présenter une formation géologique très différente des mers qui ont été explorées jusque-là dans le cadre du programme Surveyor. Malgré le caractère chaotique de la zone d'atterrissage, la sonde réussit un atterrissage parfait à 2,5 km du point visé. La sonde emporte à la fois une pelle et un analyseur à rayons alpha. Pour abaisser ce dernier, qui reste bloqué en position haute, les opérateurs sur Terre ont recours aux services de la pelle. Le sol se révèle plus mou que celui des précédents sites et sa composition est légèrement différente avec une proportion de fer nettement inférieure (2 % au lieu de 5 %)[35].
| Sonde | Date du lancement | Masse (kg) totale/atterrissage | Lieu d'atterrissage | Principaux instruments embarqués | Résultat |
|---|---|---|---|---|---|
| Surveyor 1 | 995,2 / 294 | Océan des Tempêtes | Caméra | Succès | |
| Surveyor 2 | - /292 | - | Caméra | Échec | |
| Surveyor 3 | 1026/296 | Mer de la Connaissance | Caméra, pelle | Succès | |
| Surveyor 4 | 1038/283 | - | Caméra, pelle | Échec | |
| Surveyor 5 | 1006/303 | Mer de la Tranquillité | Caméra, analyseur à rayons alpha | Succès | |
| Surveyor 6 | 1006/300 | Sinus Medii | Caméra, analyseur à rayons alpha | Succès | |
| Surveyor 7 | 1039/306 | Cratère Tycho | Caméra, pelle, analyseur à rayons alpha | Succès |
La fin du programme

En 1965, les responsables du programme Surveyor envisagent de réintégrer à partir de la cinquième mission les instruments scientifiques qui ont été éliminés à cause des problèmes rencontrés au cours du développement de l'étage Centaur. Il est alors prévu que la masse de la sonde soit portée à 1 100 kg et qu'elle puisse emporter 52 kg d'instruments scientifiques dont notamment trois caméras, une foreuse, un sismomètre, et un détecteur de micrométéorites. Peu après, le nombre de missions planifié passe de 7 à 10 : la première sonde scientifique doit désormais être la huitième. Fin 1966, les contraintes budgétaires entrainent finalement la suppression des trois dernières missions mettant fin aux espoirs d'un volet scientifique du programme. En , l'équipage d'Apollo 12 réussit à poser son LEM non loin de Surveyor 3 : la caméra et la pelle de la sonde sont détachées et sont ramenées sur Terre par l'équipage pour étudier l'effet de leur exposition prolongée au vide de l'espace. La caméra est aujourd'hui exposée au National Air and Space Museum de Washington[37]. À son achèvement, les sommes dépensées pour développer les sondes Surveyor s'élèvent à 469 millions US$, soit le quadruple de l'estimation initiale et un montant supérieur au cout cumulé des deux programmes de sondes spatiales contemporains Ranger (260 millions) et Lunar Orbiter (200 millions). Si ce dépassement peut paraitre important, il n'est en réalité pas très éloigné de ce qui est constaté sur les quinze programmes spatiaux américains de l'époque : leur cout est en moyenne multiplié par 3,5 par rapport à l'estimation initiale[38],[39],[40].
Caractéristiques techniques des sondes Surveyor
La structure
La structure centrale de la sonde Surveyor est constituée d'un treillis ouvert de tubes en aluminium en forme de pyramide tronquée sur lesquels sont montés les différents sous-systèmes et la charge utile (voir Schéma 1 et Schéma 2 plus bas). Son apparence arachnéenne, l'absence d'enveloppe extérieure qui souligne la disparition des contraintes aérodynamiques dans le vide, le démarque des sondes américaines qui l'ont précédé. Le train d'atterrissage comporte trois jambes montées sur une charnière et fixées aux angles de la pyramide : celles-ci comportent des absorbeurs de choc dans leur partie supérieure et se terminent par des pieds en forme de larges semelles cylindriques de 13 cm de haut et de 20 cm de diamètre à la base. Ceux-ci sont également conçus pour se déformer si la vitesse verticale à l'arrivée est élevée. D'autres absorbeurs de choc de 20 cm de haut, réalisés comme les précédents avec une structure de type nid d'abeilles en aluminium, sont montés sous l'armature principale. Lorsque le train d'atterrissage se déforme au contact avec le sol en abaissant la structure centrale de la sonde, ces blocs neutralisent l'énergie résiduelle. L'empattement est de 4,3 mètres pour une hauteur totale de 3 mètres. Les différents équipements sont dispersés sur cette structure ouverte ce qui reflète l'organisation très décentralisée du projet chez le constructeur de la sonde, Hughes Aircraft. Cette disposition contraire aux principes modernes de regroupement par sous-systèmes, ne contribuait pas à optimiser la masse de l'engin mais permit de le faire évoluer très facilement au fur et à mesure des missions[41].

|
1. Semelle du train d'atterrissage |
9. Moteur vernier |
18. Capteur solaire |

|
1. Semelle du train d'atterrissage |
7. Caméra |
La propulsion
|
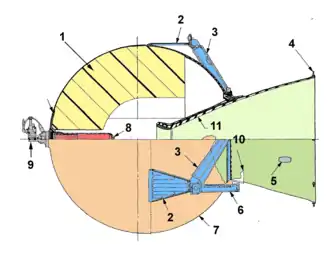
1. Bloc de propergol solide |
7. Réservoir (94 cm de diamètre) |
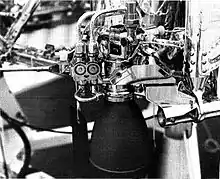
La sonde dispose de trois ensembles de propulseurs : une rétrofusée qui est utilisée pour annuler la quasi-totalité de la vitesse à l'approche de la Lune, trois moteurs verniers dont le rôle principal est de freiner la sonde durant la descente sur le sol lunaire et enfin trois paires de petits propulseurs à gaz froid chargés de maintenir l'orientation de la sonde[42].
La rétrofusée, chargée de faire chuter la vitesse de la sonde de 2 750 m/s à environ 159 m/s à l'approche de la Lune, est un propulseur à propergol solide Thiokol TE-364 d'une poussée de 40 kN (4 tonnes). Le moteur est constitué d'un réservoir sphérique en acier de 94 cm de diamètre contenant le propergol d'où émerge une longue tuyère en partie enfoncée dans le réservoir (voir Schéma 3). Le moteur a une impulsion spécifique de 275 à 280 secondes[43].
Les trois moteurs verniers, dont la poussée peut être modulée entre 140 et 470 N, brûlent du monométhylhydrazine et du peroxyde d'azote qui s'enflamment spontanément lorsqu'ils sont mis en contact (hypergolique). Carburant et comburant sont envoyés dans les tuyères par de l'hélium sous pression. La sonde embarque 81 kg de carburant répartis dans 6 réservoirs sphériques (deux par moteurs) qui sont maintenus à une température acceptable par une combinaison d'isolants thermiques et de résistances chauffantes. La poussée d'un de ces trois propulseurs est par ailleurs orientable de 6° de part et d'autre de son axe avec un degré de liberté qui lui permet d'agir sur le roulis. Ces moteurs sont chargés d'effectuer les corrections de trajectoire, de maintenir l'orientation de la sonde durant le fonctionnement de la rétrofusée et de freiner la sonde durant la dernière phase d'atterrissage[44].
Les radars
Pour parvenir à atterrir en douceur sur le sol lunaire, la sonde dispose de deux radars. Le premier, dit AMR (altitude marking radar), est installé au débouché de la tuyère, de la rétrofusée et a un usage très ponctuel : il doit mesurer la distance à laquelle se trouve la Lune et initialiser la séquence de mise à feu de la rétrofusée lorsqu'une valeur programmée est atteinte. Le second radar, dit RADVS (radar altitude Doppler velocity sensing), prend alors le relais du premier après l'extinction de la rétrofusée et alimente en données le calculateur de bord durant la phase de descente jusqu'à l'atterrissage. Il dispose de deux antennes qui lui permettent de calculer d'une part la distance au sol et d'autre part la vitesse verticale et horizontale de la sonde par rapport à celui-ci par effet Doppler[45].
Les télécommunications et l'énergie
La sonde est surmontée d'un mât implanté de manière dissymétrique à mi-distance entre deux des coins de la structure pyramidale. À son sommet se trouvent l'antenne de télécommunications grand gain (grand débit 27 db) de forme plane et un panneau solaire. Trois moteurs électriques permettent d'ajuster l'orientation pour que ces deux équipements soient dirigés respectivement vers la Terre et vers le Soleil. L'orientation du panneau solaire vers le Soleil est commandée depuis la Terre compte tenu du déplacement relativement lent du Soleil dans le ciel une fois la sonde posée sur le sol lunaire (0,5° par heure). La sonde dispose par ailleurs de deux antennes omnidirectionnelles à faible gain, également montées sur un petit mât articulé. Les transmissions, qui utilisent la bande S, peuvent se faire à faible puissance (100 mW) ou à forte puissance (10 W). Le panneau solaire d'une superficie de 0,855 m2 est en position repliée le long du mât durant le lancement. Il fournit 90 W qui sont stockés dans une batterie argent-zinc d'une capacité de 176 A-h. Celle-ci délivre directement une tension de 22 V. Une batterie auxiliaire de 45 A-h est installée sur les modèles 1 à 4 pour permettre à la sonde d'être opérationnelle immédiatement après l'atterrissage. Les concepteurs de la sonde ont choisi d'alléger au maximum la tâche du calculateur embarqué : les différentes opérations sont télécommandées depuis la Terre grâce à un langage comprenant 256 types d'instruction. Les valeurs d'une centaine de paramètres sont transmises périodiquement par la sonde au contrôle au sol[46].
Le contrôle d'orientation et le contrôle thermique
La sonde est stabilisée 3 axes : le contrôle de l'orientation de la sonde utilise deux senseurs solaires (un capteur moins précis pour le premier repérage et un senseur fin), un viseur d'étoiles développé dans le cadre du programme Mariner qui est maintenu pointé vers l'étoile Canopus et des gyroscopes. Les corrections d'orientation sont effectuées à l'aide de trois paires de petits propulseurs à gaz froid installés au-dessus des semelles du train d'atterrissage qui éjectent de l'azote stocké dans un réservoir sphérique d'une contenance de 2 kg. Le contrôle thermique est à la fois passif grâce à des couches d'isolants et des peintures réfléchissantes et actif. Deux boitiers regroupant l'électronique — télécommunications, calculateur de bord, transformateur électrique — sont isolés sur le plan thermique grâce à une double paroi dans laquelle est inséré un isolant constitué de 75 feuilles de mylar sur un support d'aluminium. Le contrôle thermique actif maintient dans les boitiers la température dans une fourchette compatible avec les caractéristiques de l'électronique grâce à des caloducs chargés d'évacuer la chaleur vers des radiateurs situés au sommet des boitiers et des résistances électriques chargées au contraire de maintenir une température assez élevée[41],[47].
Déroulement d'une mission


La fenêtre de lancement
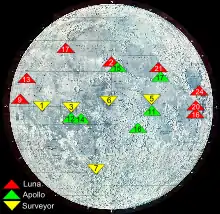
La fenêtre de lancement des sondes Surveyor est déterminée par plusieurs paramètres. La sonde se pose au tout début de la période éclairée d'une journée lunaire (soit quatorze jours terrestres) pour pouvoir remplir sa mission avant que le Soleil n'atteigne son zénith et ne crée des conditions thermiques défavorables. Pour les premières missions, le point d'injection sur la trajectoire Terre-Lune est déterminé de manière rigide par l'heure de lancement. En effet, compte tenu des incertitudes sur la capacité de l'étage Centaur à pouvoir être mis à feu à deux reprises, la sonde ne stationne pas sur une orbite d'attente jusqu'à l'obtention d'un alignement favorable. L'injection vers la Lune est directe, toutefois les réserves de carburant de l'étage Centaur permettent d'élargir la fenêtre de lancement à quelques heures par jour. La durée du transit vers la Lune est fixée par la vitesse de la sonde sur son trajet, elle-même déterminée par les capacités du lanceur et celle de la rétrofusée. Au moment de la phase critique de l'atterrissage, l'antenne de Goldstone doit pouvoir recevoir les signaux de la sonde. En pratique, la durée du transit entre la Terre et la Lune est comprise entre 61 et 65 heures. Tous les sites d'atterrissage, sauf celui de Surveyor 7, sont situés près de l'équateur pour limiter la consommation de carburant et les manœuvres à l'arrivée. Pour la mission de Surveyor 1, première de la série et à haut risque, le site d'atterrissage retenu est situé quasiment à la verticale locale du point d'arrivée de la sonde à proximité de la Lune[48].
Le lancement et le transit vers la Lune
Le lanceur est tiré depuis la base de Cape Canaveral en Floride. Contrairement à l'Atlas-Agena, la trajectoire du lanceur n'est pas corrigée depuis le sol mais est modifiée de manière continue par le système de guidage logé dans l'étage Centaur. Parvenu à l'altitude de 120 km, la coiffe en fibre de verre est larguée[N 5]. L'étage Centaur est mis à feu alors que le lanceur a atteint une altitude de 155 km. Les moteurs de l'étage Centaur sont arrêtés automatiquement lorsque la vitesse atteinte est de 10,5 km/s. Il s'est alors écoulé 438 secondes depuis la mise à feu du second étage et 689 secondes depuis le décollage. La sonde se trouve à une altitude de 166 km et à 3 600 km au sud-ouest de Cape Canaveral lorsqu'elle entame son transit vers la Lune. La sonde est désormais placée sur une orbite fortement elliptique autour de la Terre avec un périgée de 160 km et un apogée de 384 000 km. Cette trajectoire est calculée pour que la sonde, lorsqu'elle atteint son apogée, tombe dans le champ d'attraction de la Lune[49].
L'étage Centaur utilise la liaison électrique reliée à la sonde pour envoyer la commande de déploiement de la partie inférieure des jambes d'atterrissage du train d'atterrissage et de l'antenne grand gain. Ces parties de la sonde sont repliées sous la coiffe pour limiter le volume occupé. Le calculateur de l'étage Centaur déclenche alors le cisaillement de la ligne électrique puis 5 secondes plus tard la séparation du lanceur et de la sonde[N 6]. Cette dernière se met à pivoter à l'aide de ses petits moteurs de contrôle d'attitude pour orienter son panneau solaire en direction du Soleil. Elle pivote d'abord autour de son axe principal à la vitesse de 0,5° par seconde jusqu'à ce qu'un premier senseur solaire ayant un champ optique de 196° × 10° détecte l'astre puis elle pivote sur ses autres axes jusqu'à ce qu'un deuxième senseur solaire plus sensible (au champ optique plus étroit) détecte le Soleil. Le panneau solaire est alors libéré par une petite charge pyrotechnique et est orienté de manière à être perpendiculaire au mât et face au Soleil. L'étage Centaur utilise ses moteurs de contrôle d'orientation pour entamer une rotation de 180° puis, alors qu'il a effectué la moitié de son changement d'orientation, déclenche brièvement ses moteurs puis purge ses réservoirs pour écarter sa trajectoire de celle de la sonde et ne pas risquer de rentrer dans le champ optique du viseur d'étoiles. Celui-ci est utilisé quatre heures plus tard pour figer l'orientation de la sonde. À mi-course, la sonde quitte cette orientation pour placer ses moteurs verniers dans la position adéquate afin d'effectuer une petite correction de trajectoire (delta-v de 3 m/s pour Surveyor 1)[49].
La phase d'atterrissage

L'arrivée sur la Lune se fait selon une trajectoire hyperbolique sans mise en orbite intermédiaire autour de notre satellite. La Lune étant dépourvue d'atmosphère, l'arrivée au sol avec une vitesse nulle repose sur la capacité des moteurs à réduire la vitesse liée au transit et générée par la gravité lunaire. La trajectoire retenue pour les sondes Surveyor consiste à annuler la vitesse horizontale par rapport au sol lunaire à une dizaine de kilomètres d'altitude puis à se laisser tomber à la verticale sous l'effet de la gravité lunaire en annulant 90 % de la vitesse générée par celle-ci. Cette stratégie prudente mais relativement normale compte tenu de l'absence d'expérience à l'époque du programme Surveyor, est par contre peu efficace sur le plan énergétique comme le montre les modifications apportées au plan de vol de Surveyor 5 qui a pu atterrir en entamant la descente verticale à seulement 1,3 km du sol en utilisant beaucoup moins d'ergols[50].
En pratique, 30 minutes avant l'atterrissage, la sonde s'oriente de manière à aligner l'axe de la rétrofusée avec le vecteur vitesse en utilisant le senseur solaire et le viseur d'étoiles. Lorsque le radar AMR détecte que le sol lunaire n'est plus qu'à 100 km, il déclenche la séquence de mise à feu de la rétrofusée : au bout de 8 secondes, les moteurs verniers sont allumés afin de maintenir l'orientation de la sonde durant le fonctionnement de la rétrofusée. Celle-ci est allumée une seconde plus tard alors que l'altitude est tombée à 76 km : les gaz générés par la rétrofusée expulsent l'antenne du radar AMR fixée à la sortie de la tuyère. L'action de la rétrofusée fait chuter la vitesse en moyenne[N 7] de 2 750 m/s à 159 m/s en 40 secondes. Dix secondes après son extinction, la rétrofusée et son réservoir sont éjectés alors que l'altitude est de 10 km : la masse de la sonde passe de 995 kg à 340 kg à l'issue de cette phase. La sonde entame alors une descente contrôlée en utilisant ses moteurs verniers pilotés par le calculateur embarqué. Celui-ci exploite les données fournies par le radar altimètre qui, à l'aide de 4 faisceaux électromagnétiques, mesure à la fois l'altitude, la vitesse verticale et au cours de la dernière phase, la vitesse horizontale par effet Doppler. Arrivée à 4,5 mètres du sol, les moteurs verniers sont éteints et la sonde tombe en chute libre et atterrit avec une vitesse verticale d'environ 5 m/s et une vitesse horizontale quasi nulle[50],[51].
Résultats scientifiques
La charge utile des sondes Surveyor, qui devait comporter initialement plus d'une dizaine d'instruments scientifiques, a été simplifiée à l'extrême à la suite des problèmes de performance de l'étage Centaur. Les instruments emportés ont pour objectif principal de déterminer les caractéristiques du sol et du relief lunaire en vue des atterrissages du module lunaire Apollo.
Les instruments scientifiques
Les instruments installés sur les sondes ont varié en fonction des missions :
- une caméra est embarquée sur toutes les missions. Elle permet d'effectuer une vue panoramique sur 360° et peut être orientée en azimut de -65° à +40° (+90° à partir de Surveyor 6). Sa résolution est de 1 mm à 4 mètres et la mise au point peut se faire de 1,23 mètre à l'infini. Le champ optique peut aller de 25,3 à 6,43° mais en pratique seules les deux valeurs extrêmes sont utilisées. La caméra comporte 3 filtres de couleurs et un filtre polarisant. Le réglage et l'orientation de la caméra sont commandés depuis la Terre. La lumière incidente est transformée en signaux électriques par un tube Vidicon. La caméra permet de produire des images avec deux définitions : 600 lignes ou 200 lignes. Deux mires accrochées sur une antenne omnidirectionnelle et au-dessus d'une des semelles du train d'atterrissage facilitent le réglage de l'appareil[52] ;
- une pelle est installée sur les sondes Surveyor 3 et Surveyor 7. Elle est utilisée pour tester la résistance du sol à la pression et à l'impact ainsi que pour creuser des tranchées afin d'analyser le sol en profondeur. La pelle est longue de 12 cm et large de 5 cm. Elle est montée à l'extrémité d'un dispositif articulé qui lui permet de gratter le sol sur une distance comprise entre 58 et 163 centimètres de son point d'attache sur un des côtés de l'atterrisseur. Elle peut être déplacée latéralement sur un arc de 112° et être soulevée jusqu'à une hauteur de 102 cm au-dessus du sol puis abaissée avec une certaine vigueur sous l'effet combiné de la gravité lunaire et d'un ressort afin de tester les propriétés mécaniques du sol. La pelle peut être également positionnée à 46 cm en dessous du niveau des pieds de l'atterrisseur. La pelle est équipée de capteurs permettant de connaitre les forces appliquées[53],[13] ;
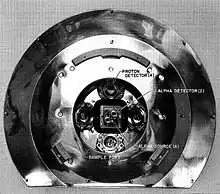
- un analyseur à particules alpha est installé sur les sondes Surveyor 5, 6 et 7. Il utilise une source radioactive (Curium 242) pour bombarder un échantillon du sol. Des détecteurs de particules alpha et de protons placés à côté de la source émettrice analysent les particules renvoyées par l'échantillon soumis au bombardement. En fonction de l'énergie de ces particules, la composition atomique de l'échantillon peut être déduite assez précisément. Le dispositif est installé dans un boitier dont la partie inférieure est ouverte et qui est maintenu dans une plage de températures acceptable grâce à des revêtements isolants et une résistance électrique. Il est accroché à un support sur le corps du satellite durant le transit vers la Lune puis abaissé après l'atterrissage à l'aide d'une corde en nylon sur le sol lunaire pour permettre l'analyse. Celle-ci dure plusieurs heures. Seul l'échantillon de sol situé à la verticale du lieu de stockage de l'analyseur peut être analysé. Surveyor 7 qui emporte également une pelle, a pu l'utiliser pour déplacer l'analyseur et effectuer des analyses à des emplacements différents[54] ;
- des aimants destinés à détecter les matériaux sensibles à un champ magnétique sont installés sur les sondes à partir de Surveyor 5. Un aimant et une barre de contrôle non magnétisée sont fixés sur un des pieds du train d'atterrissage de cette sonde et de la suivante. Pour la sonde Surveyor 7, les aimants sont installés sur deux de ses pieds ainsi que sur la pelle[55].
Les résultats obtenus
Les principales données collectées par le programme Surveyor sont les 87 674 photos prises par la caméra depuis la surface de la Lune dont 98 % au cours du premier jour lunaire de chaque mission[56]. Les scientifiques tirent plusieurs conclusions de ces images. La profondeur des cratères bordés de blocs rocheux photographiés leur permet d'estimer l'épaisseur de la couche de régolithe, cette poussière résultant des impacts répétés des météorites : celle-ci varie de 1 à 20 mètres selon les sites. La distribution des cratères de quelques centimètres à quelques dizaines de mètres observés autour des sites d'atterrissage confirment l'ancienneté du bombardement subi par la Lune[57]. L'analyseur à particules alpha a permis de déterminer que les trois premiers éléments chimiques composant les échantillons testés sont l'oxygène (57 %), le silicium (20 %) et l'aluminium (7 %). Ce sont dans cet ordre les éléments les plus fréquents dans la croute terrestre. L'échantillon de sol du site situé en hauteur visité par Surveyor 7 diffère de ceux analysés dans les plaines : la proportion du groupe du fer (qui va du titane au cuivre) est plus forte. Ces résultats, très différents par ailleurs de la composition des météorites, écartent l'hypothèse d'une Lune vestige du matériau primitif présent à la formation du système solaire[58].
Dans l'optique du programme Apollo, les propriétés mécaniques du sol lunaire ont fait l'objet d'une étude particulièrement approfondie. Le sol qui a la consistance du sable mouillé est compressible mais sa résistance à la compression augmente rapidement avec la profondeur et atteint 5,5 N/cm2 à 5 cm[59]. Cette résistance est largement compatible avec le train d'atterrissage du module lunaire qui doit amener les hommes sur la Lune. Les sondes Surveyor n'ont pas pu effectuer d'atterrissage de précision près des sites susceptibles d'être retenus pour le programme Apollo ; les responsables de la NASA devront partir de l'hypothèse que les constatations faites sur les propriétés du sol lunaire par les missions Surveyor s'appliquent aux futurs sites d'atterrissage des missions habitées. Cette hypothèse s'avèrera fondée[60].
Galerie de photos prises par des sondes Surveyor
 Mosaïque de photos du cratère Tycho prises par Surveyor 7.
Mosaïque de photos du cratère Tycho prises par Surveyor 7. Petit cratère photographié par Surveyor 1.
Petit cratère photographié par Surveyor 1. Surveyor 7 avant et après une brève mise à feu des moteurs verniers pour tester la tenue mécanique du sol lunaire.
Surveyor 7 avant et après une brève mise à feu des moteurs verniers pour tester la tenue mécanique du sol lunaire. Surveyor 7 : terrain vallonné au nord est du site d'atterrissage.
Surveyor 7 : terrain vallonné au nord est du site d'atterrissage.
Notes et références
Notes
- En 1892, le géologue américain Grove Karl Gilbert est le premier à attribuer la création de tous les cratères lunaires à des impacts en expliquant le mécanisme qui leur donne. Mais la théorie dominante au cours du demi-siècle suivant déclare que les cratères sont dus à des phénomènes volcaniques. L'astrophysicien et industriel Ralph Belknap Baldwin (en) apporte des arguments solides dans son ouvrage The Face of the Moon publié en 1949, fruit de ses observations et de ses connaissances dans le domaine des explosifs. À la fin des années 1950, cette explication par des impacts de météorites n'est pas encore totalement approuvée.
- Le JPL a un droit de veto sur les orientations de programme de la NASA qui le concernent. Il est administré (théoriquement) par Caltech à qui la NASA verse la somme annuelle de 2 millions US$ pour cette prestation (une somme très importante à cette époque). Ces clauses contraignantes sont acceptées par les dirigeants de la NASA qui espèrent bénéficier en retour de contacts privilégiés avec le monde universitaire et celui de la recherche par le biais du JPL. Paradoxalement, celui-ci est à l'époque peu apprécié des chercheurs qui reprochent aux membres du centre leur désinvolture dans le développement des charges utiles scientifiques et leur absence de considération pour le travail qu'ils effectuent.
- Hughes Aircraft, North American, Space Technology Laboratories et McDonnell Aircraft
- Le guidage assuré par l'étage Centaur est si précis qu'il crée un problème : la sonde Surveyor disposait d'une certaine quantité de carburant pour corriger sa route sur la trajectoire Terre-Lune mais ce carburant se révéla superflu du fait de la qualité de la prestation de l'étage Centaur. Les ingénieurs du JPL durent trouver une solution pour se débarrasser de cet excès de poids avant l'atterrissage sur la Lune.
- Les chiffres dans ce paragraphe sont ceux du vol de Surveyor 1 avec injection directe vers la Lune.
- Toutes ces actions sont déclenchées au moyen de petites charges pyrotechniques qui libèrent des goupilles et la séparation/mise en position a recours à des ressorts.
- La poussée de la rétrofusée dépend de la température du moteur qui permet une combustion chimique plus ou moins efficace. Cette température dépend à son tour de l'exposition au Soleil de la structure externe de la rétrofusée, facteur mal maitrisé par les concepteurs de la sonde.
Références
- (en) Office of Planetary Protection, « All of the planets, all of the time : Solar System Missions », NASA, (consulté le ).
- (en) Loyd S. Swenson Jr.,James M. Grimwood,Charles C. Alexander (NASA), « This New Ocean: A History of Project Mercury - Redstone and Atlas », (consulté le )
- (de) Berndt Leeitenberger, « Die Semjorka Trägerraket » (consulté le )
- David M. Harland, p. 43 op. cit.
- (en) Benn D. Martin, « The Mariner planetary communication systeme design » [PDF], 15 mais 1961, p. 2
- (en) Don E. Wilhelms, To a Rocky Moon : A Geologist's History of Lunar Exploration, (lire en ligne), chap. 1 (« A Quiet Prelude 1892–1957 »), p. 28
- (en) Don E. Wilhelms, To a Rocky Moon : A Geologist's History of Lunar Exploration, (lire en ligne), chap. 1 (« A Quiet Prelude 1892–1957 »), p. 26-27
- (en) Don E. Wilhelms, To a Rocky Moon : A Geologist's History of Lunar Exploration, (lire en ligne), chap. 1 (« A Quiet Prelude 1892–1957 »), p. 19-20
- (en) Don E. Wilhelms, To a Rocky Moon : A Geologist's History of Lunar Exploration, (lire en ligne), chap. 3 (« The Earthbound View 1961–1963 »), p. 67-69
- (en) Homer Edward Newell, « Beyond the Atmosphere: Early Years of Space Science - Chapter 15 Jet Propulsion Laboratory: Outsider or Insider? »,
- (en) Homer Edward Newell, « Beyond the Atmosphere: Early Years of Space Science - chapter 15 The question of responsiveness »,
- (en) Homer Edward Newell, « Beyond the Atmosphere: Early Years of Space Science - Chapter 15 Moon and Planets »,
- (en) Dean Eppler (NASA), Data Collection by Robotic Precursors in Support of Projet Apollo, (lire en ligne), p. 16
- David M. Harland, p. 56 op. cit.
- (en) Don E. Wilhelms, To a Rocky Moon : A Geologist's History of Lunar Exploration, (lire en ligne), chap. 8 (« Surveyor and the Regolith 1966–1968 »), p. 137-138
- (en) Oran W. Nicks, « Far travelers: The Exploring Machines - Essentials for Surveyor »,
- (en) Judy A Rumerman,, NASA Historical Data Book, Vol. VII : NASA Launch Systems, Space Transportation, Human Spaceflight, and Space Science (SP 4012v2), 1989-1998 (lire en ligne [PDF]), chap. 3 (« Space science and applications »), p. 327
- David M. Harland, p. 143 op. cit.
- David M. Harland, p. 143-149 op. cit.
- (en) Dean Eppler (NASA), Data Collection by Robotic Precursors in Support of Projet Apollo, (lire en ligne [PDF]), p. 9-11
- Patrick Maurel, L'escalade du Cosmos, Bordas, , p. 170-171
- (en) Don E. Wilhelms, To a Rocky Moon : A Geologist's History of Lunar Exploration, (lire en ligne), chap. 4 (« Preparing to Explore 1963–1965 »), p. 82
- Erasmus H. Kloman, p. 46-79 op. cit.
- Erasmus H. Kloman, p. 80-89 op. cit.
- (en) Virginia P. Dawson et Mark D. Bowle, « Unmanned Space Project Management Surveyor and Lunar Orbite (SP-4901) »,
- (en) Homer Edward Newell, « Beyond the Atmosphere: Early Years of Space Science - Chapter 15 Accommodation », (consulté en )
- David M. Harland, p. 137-142 op. cit.
- David M. Harland, p. 168-199 op. cit.
- (en) NASA - NSSDC Master Catalog, « Surveyor 1 » (consulté le )
- (en) Don E. Wilhelms, To a Rocky Moon : A Geologist's History of Lunar Exploration, (lire en ligne [PDF]), chap. 8 (« Surveyor and the Regolith 1966–1968 »), p. 140-141
- Virginia P. Dawson et al., p. 90-94 op. cit.
- David M. Harland p. 287-314 op. cit.
- David M. Harland p. 325-349 op. cit.
- David M. Harland p. 349-364 , op. cit..
- David M. Harland p. 366-391 op. cit.
- (en) « Surveyor (1966 - 1968) », NASA (consulté le )
- (en) National Air and Space Museum, « Exploring the Planets » (consulté le )
- (en) Bernd-Leitenberger, « Die Surveyor Raumsonden » (consulté le )
- (en) « Surveyor 7 », NASA NSSDC (consulté le )
- (en) Erasmus H. Kloman (NASA), « Unmanned space projet management : Surveyor and Lunar Orbiter (NASA SP-4901) » [PDF], , p. 25-26
- Andrew J. Ball et al., chap. 21 : Surveyor landers, p. 264-265, op. cit.
- Surveyor V mission report, p. 70-84, op. cit..
- Surveyor V mission report, p. 80-84, op. cit..
- Surveyor V mission report, p. 70-80, op. cit..
- Surveyor V mission report, p. 89-99 op. cit.
- David M. Harland, p. 166-167, Modèle:Op. cit.
- (de) Bernd Leitenberger, « Die Surveyor Raumsonden » (consulté le )
- David M. Harland, p. 168-169, op. cit..
- David M. Harland, p. 169-174, op. cit..
- Andrew J. Ball et al chap. 5 : Descent to an airless body, p. 48-50 op. cit.
- David M. Harland, p. 178-183 op. cit.
- Surveyor Program Results, p. 22 op. cit.
- Surveyor Program Results, p. 16 op. cit.
- Surveyor Program Results, p. 282-289 op. cit.
- Surveyor Program Results, p. 18 op. cit.
- Surveyor Program Results, p. 10, op. cit..
- Surveyor Program Results, p. 13, op. cit..
- Surveyor Program Results, p. 16-17, op. cit..
- Surveyor Program Results, p. 14-15, op. cit..
- (en) Dean Eppler (NASA), Data Collection by Robotic Precursors in Support of Projet Apollo, (lire en ligne [PDF]), p. 18.
Sources
Ouvrage de référence :
- (en) David M. Harland, Paving the way for Apollo 11, Springer, , 472 p. (ISBN 978-0-387-68131-3)Histoire détaillée des programmes de sondes lunaires américaines (Surveyor, Ranger, Lunar Orbiter) liés au programme Apollo.
Ouvrages de la NASA :
- (en) Oran W. Nicks, Far travelers : The Exploring Machines, (lire en ligne)Monographie de la NASA sur les sondes spatiales de la NASA (document NASA n° Special Publication-480).
- (en) Virginia P. Dawson et Mark D. Bowles, Unmanned Space Project Management Surveyor and Lunar Orbiter, (lire en ligne)Histoire des programmes Surveyor et Lunar Orbiter (document NASA n° Special Publication-4901).
- [PDF] (en) NASA, Surveyor Program Results, (lire en ligne)Résultats scientifiques du programme (document NASA n° Special Publication-184).
- (en) NASA Surveyor Project staff, Surveyor V mission report Part I Mission Description and Performance (technical report 32-1246, Rapport technique effectué à la suite du vol de Surveyor V.
- [PDF] (en) Erasmus H. Kloman, Taming Liquid Hydrogen : the Centaur upper stage rocket (1958-2002), (lire en ligne)Histoire du développement de l'étage Centaur (document NASA n° Special Publication-4230).
- [PDF] (en) Sam W. Thurman, Surveyor Spacecraft Automatic Landing System, (lire en ligne)Exposé sur le déroulement de l'atterrissage des sondes Surveyor.
Autres :
- (en) Don E. Wilhelms, To a Rocky Moon : A Geologist's History of Lunar Exploration, (lire en ligne)Histoire de la recherche scientifique sur la Lune au début de l'ère spatiale (1957-1972)
- (en) Andrew J. Ball et al, Planetary Landers and entry Probes, Cambridge University Press, , 340 p. (ISBN 978-0-521-12958-9)Concepts des atterrisseurs et analyse des principaux développements dans le domaine.
Annexes
Articles connexes
- Centaur (qui permit le lancement des sondes Surveyor)
- Programme Lunar Orbiter (programme d'orbiteurs qui fut le pendant des sondes Surveyor)
- Programme Apollo
- Programme Luna (programme soviétique concurrent)
- Exploration de la Lune
- Géologie de la Lune
Lien externe
 Portail de l’astronautique
Portail de l’astronautique  Portail des années 1960
Portail des années 1960  Portail de la Lune
Portail de la Lune  Portail des États-Unis
Portail des États-Unis