Homología afín
En la terminología de los geometría descriptiva, se emplean las denominaciones de homología afín o de afinidad homológica para designar a un caso particular de homología, en el que el vértice o centro es un punto impropio situado en el infinito, y en consecuencia, las líneas de proyección son paralelas entre sí (es decir, dos puntos afines (A-A') están unidos por una recta que es paralela a la dirección de afininidad).
Por otro lado, en matemáticas, una afinidad es una aplicación lineal o afín de un espacio vectorial o afín sobre sí mismo, que equivale a la identidad en una dirección y a una homotecia en otra.
Etimología
El término afinidad (affinitas en latín) en un sentido matemático fue introducido por Leonhard Euler en su obra de 1748, "Introductio in Analysin infinitorum".[1] En su capítulo De similitudine et affinitate linearum curvarum[2], Euler estudia curvas similares, es decir que tienen la misma forma pero con un posible cambio de orientación y tamaño. Estas son curvas entre cuyas imágenes se puede establecer una relación de semejanza. Después de observar que multiplicando la abscisa y la ordenada por el mismo número, se transforma una curva en una curva similar, se planteó la cuestión del caso en el que la abscisa y la ordenada se multiplican por números diferentes.[3] Observó que las curvas ya no son semejantes pero, debido a cierta analogía de forma, dirá que presentan una “afinidad”[4] entre ellas. Aquí toma el significado literal de afinidad: mantener una cierta relación de proximidad o de semejanza. Así, un círculo y una elipse no son similares pero tienen afinidad entre ellos.
La afinidad estudiada por Euler no se corresponde estrictamente con la definida actualmente, ya que permite una modificación de escala en varias direcciones, pero es fácilmente reducible a ella aplicando composiciones de varias afinidades “modernas”.
Afinidad vectorial
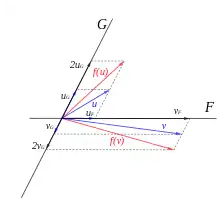
Una afinidad vectorial es un endomorfismo, que a su vez es la suma directa de una identidad y de una homotecia. Más precisamente:
Sea un espacio vectorial, y dos subespacios adicionales , es decir, , y un número real; entonces la afinidad de la base o sobre , de la dirección y de la relación es el endomorfismo único que, restringido a , es igual a la identidad, y restringido a , es igual a la homotecia de razón :









- si , entonces .


Caracterización en dimensión finita: endomorfismo diagonalizable que tiene como máximo dos valores propios distintos, de los cuales como máximo uno es diferente de la unidad.
Las afinidades cubren los siguientes casos especiales:
- Con respecto a y :
- Si , la afinidad es la función identidad
- Si es , la afinidad es una homotecia de relación
- Si es , la afinidad se llama hiperplana y lleva el nombre de dilatación
- Con respecto al valor :
- Si es , la afinidad es la proyección sobre paralela a . Si es , esta afinidad no es biyectiva. Este es el único caso en el que la afinidad no es una transformación propiamente dicha
- Si , la afinidad es la función identidad. Si es , este es el único caso en el que el conjunto de invariantes es diferente de
- Si , la afinidad es una simetría con respecto a en paralelo a







La afinidad de la base , la dirección y la relación está vinculada a la proyección sobre paralela a mediante la siguiente igualdad:[5]


Afinidad entre puntos
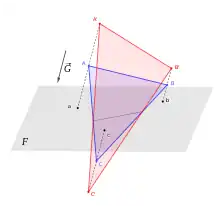


Dado un espacio afín asociado con , un subespacio afín asociado con y una dirección adicional de , la afinidad de la base o en , de dirección , y proporción es la aplicación definida de la siguiente manera:


- Para cualquier punto de , se construye la proyección de en paralela a :
- Sea el subespacio afín único que pasa por y en dirección
- Sea el único punto de intersección de y
- La imagen de por es entonces el punto tal que .





Una afinidad puntual es necesariamente una transformación afín cuya parte lineal es una afinidad vectorial.
"Recíprocamente", una aplicación afín de una parte lineal y una afinidad vectorial es una afinidad puntual siempre que tenga al menos un punto fijo. Sin esto, se obtiene una afinidad "deslizada", compuesta por una afinidad puntual y una traslación vectorial paralela a la base de la afinidad puntual.
En el plano euclídeo, las afinidades juegan un papel importante en la descomposición de las transformaciones afines. De hecho, cualquier transformación afín del plano euclídeo se descompone en el producto de una isometría, una homotecia, una afinidad y un cizallamiento.[6]
El uso de afinidades en el plano permite agrupar curvas por familias. Por ejemplo:
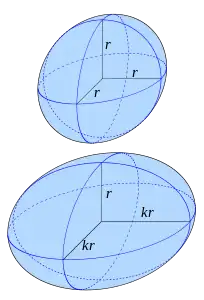
- La elipse de semieje mayor y de semieje menor es la imagen de un círculo de radio mediante una afinidad de base el eje mayor, dirección del eje menor y relación .
- La curva de ecuación es la imagen[7] de la curva de ecuación mediante una afinidad de base , dirección y relación .
- La curva de ecuación es la imagen[7] de la curva de ecuación mediante una afinidad de base , dirección y relación .
- Un caso especial sorprendente: la imagen mediante una afinidad de base , dirección y relación de la parábola con ecuación es una parábola semejante. En efecto: según las condiciones anteriores, la ecuación de esta imagen es ; o la ecuación de la imagen[7] de por la homotecia de razón es , equivalente a . También sería lo mismo para cualquier relación de afinidad distinta de cero.















Geometría descriptiva
Para hallar la imagen I' de un punto I en el infinito (punto virtual o impropio), se procede de manera semejante a la de una homología. Se traza la recta PI (que será una dirección), que corta al eje de homología (e) en un punto doble Q. Dicha recta se transforma en la recta P'Q. La imagen del punto I, como cualquier otro punto, se halla sobre la intersección de la recta P'Q con la recta OI (en el plano euclídeo, las rectas PI y IOI' son paralelas). Se verifica que la recta L, paralela al eje de homología e por el punto I', es el lugar geométrico de todas las imágenes de los puntos impropios del plano, y recibe la denominación de recta límite.
Véase también
Referencias
- Serge Mehl. «Affinité». ChronoMath, chronologie et dictionnaire des MATHÉMATIQUES.
- La versión latina es accesible en línea, página 236 y siguientes.
- En inglés, tales modificaciones se denominan escalado anisotropico.
- Leonard Euler; J. B. Labey (traducteur) (1835). «page 236, paragraphe 442». Introduction à l'analyse infinitésimale.
- Dany-Jack Mercier (2005). Publibooks, ed. Cours de géométrie [préparation au CAPES et à l'agrégation]., page 85
- «Transformations de courbes». Encyclopaedia Universalis.
- La imagen de la curva de ecuación mediante una transformación se ajusta a la ecuación , porque .




Enlaces esxternos
 Portal:Geometría. Contenido relacionado con Geometría.
Portal:Geometría. Contenido relacionado con Geometría.
| Control de autoridades |
|
|---|
 Datos: Q382770
Datos: Q382770