Polyèdre idéal
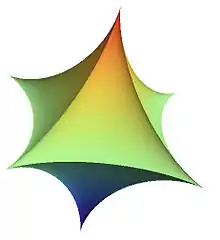
En géométrie hyperbolique à trois dimensions, un polyèdre idéal est un polyèdre convexe dont tous les sommets sont des points idéaux, c'est-à-dire des points "à l'infini" plutôt qu'à l'intérieur de l'espace hyperbolique tridimensionnel. Ce sont également les enveloppes convexes d'un ensemble fini de points idéaux. Toute face d'un polyèdre idéal est un polygone idéal. Toutes les arêtes sont des droites de l'espace hyperbolique.
Il existe des versions idéales des solides de Platon et des solides d'Archimède ayant la même structure combinatoire que leurs versions euclidiennes. Certains de ces solides peuvent paver uniformément l'espace hyperbolique de la même manière que le cube pave uniformément l'espace euclidien.
Cependant, tous les polyèdres n'ont pas nécessairement de représentation sous forme idéale : un polyèdre ne peut être idéal que s'il peut être représenté en géométrie euclidienne tel que tous ses sommets soient sur sa sphère circonscrite. Il est possible de tester si un polyèdre donné possède une version idéale en temps polynomial par un algorithme d'optimisation linéaire.
Si deux polyèdres idéaux ont le même nombre de sommets, alors l'aire de leurs surfaces sont égales. De plus, il est possible de calculer le volume d'un polyèdre idéal par la fonction de Lobachevsky . La surface d'un polyèdre idéal est une variété hyperbolique, topologiquement équivalente à une sphère perforée, et chacune de ces variétés forme la surface d'un polyèdre idéal unique.
Exemples et contre-exemples
Étant donné un ensemble fini de points idéaux dans l'espace hyperbolique, on peut en construire l'enveloppe convexe. Si les points ne sont pas coplanaires, le résultat sera un polyèdre idéal. Le solide résultant est l'intersection de tous les demi-espaces fermés ayant les points idéaux donnés comme points limites.
On peut également, à partir de tout polyèdre convexe euclidien ayant une sphère circonscrite construire le polyèdre idéal correspondant en interprétant l'intérieur de cette sphère comme le modèle de Klein de l'espace hyperbolique[1]. Dans le modèle de Klein, chaque polyèdre euclidien contenu dans la sphère représente un polyèdre hyperbolique, et chaque polyèdre euclidien ayant ses sommets sur la sphère représente un polyèdre hyperbolique idéal[2].
Tout polyèdre convexe isogonal, c'est-à-dire dont les sommets sont laissés invariants par ses symétries, peut être représenté par un polyèdre idéal ayant les mêmes symétries. En effet sa une sphère circonscrite est centrée au centre de symétrie du polyèdre. En particulier, cela implique que les solides de Platon et les solides d'Archimède sont tous représentables sous forme idéale[3].
Cependant, une autre classe de polyèdres fortement symétriques, les solides de Catalan, n'ont pas tous des formes idéales. Les solides de Catalan, qui sont les polyèdres duaux des solides d'Archimède, ont des symétries qui laissent leurs faces invariantes. Parmi les solides de Catalan qui ne peuvent pas être idéaux, on compte le dodécaèdre rhombique et le triakitétraèdre[4].
Pour le triakitétraèdre, il est possible de retirer un triplet de sommets tel que les sommets restants soient divisés en plusieurs composantes connexes. S'il est impossible de séparer le graphe des sommets par le retrait de 3 sommets, un polyèdre est dit 4-connexe . Tout polyèdre 4-connexe peut être représenté comme un polyèdre idéal ; c'est par exemple le cas du tétrakihexaèdre, un autre solide de Catalan[5].
Un cube tronqué en un seul de ses sommets est un polyèdre simple (ayant trois arêtes par sommet) qui ne peut pas être représenté par un polyèdre idéal : d'après le théorème des six cercles de Miquel, si sept des huit sommets d'un cube sont idéaux, le huitième sommet est également idéal, et donc les sommets créés par la troncature ne peuvent pas être idéaux.
Il existe des polyèdres ayant quatre arêtes concourantes en chaque sommet ne pouvant être représentés sous forme idéale[6]. Si les degrés des sommets d'un polyèdre simplicial (c'est-à-dire dont toutes les faces sont des triangles) sont tous compris entre quatre et six inclus, alors il possède une représentation sous forme idéale. En revanche, le triakitétraèdre est simplicial mais non idéal (il a des sommets d'ordre 3) et l'exemple 4-régulier ci-dessus, qui n'est pas simplicial, non plus.
Propriétés
Aires et volumes
La surface de tout polyèdre idéal à sommets peut être subdivisée en triangles idéaux[7], chacun ayant une aire égale à [1]. L'aire de la surface d'un polyèdre idéal est donc exactement .




Dans un polyèdre idéal, tous les angles des côtés des faces et tous les angles solides aux sommets sont nuls. Cependant, les angles dièdres aux arêtes d'un polyèdre idéal ne sont pas nuls. En chaque sommet, la somme des angles supplémentaires des angles dièdres incidents à ce sommet est égale à [2].

On peut grâce à cette propriété, en comptant combien d'arêtes se rencontrent à chaque sommet, calculer les angles dièdres d'un polyèdre idéal régulier ou isotoxal (dans lequel les arêtes sont invariantes par les symétries du polyèdre). En effet dans ces cas, tous ces angles sont égaux.
Ainsi, le tétraèdre régulier idéal, le cube idéal le un dodécaèdre idéal, ayant trois arêtes par sommet, ont des angles dièdres de ; l'octaèdre ou le cuboctaèdre régulier idéal, ayant quatre arêtes par sommet, ont des angles dièdres de, et l'icosaèdre régulier idéal, ayant cinq arêtes par sommet, a des angles dièdres de [8].



Le volume d'un tétraèdre idéal peut être exprimé en fonction de ses angles dièdres par une fonction de Clausen ou de Lobachevsky. Le volume d'un un polyèdre idéal quelconque se déduit alors en le divisant en tétraèdres et en additionnant les volumes des tétraèdres.[9]
L'invariant de Denh d'un polyèdre se calcule, en temps normal, en combinant les longueurs d'arêtes et les angles dièdres du polyèdre. Toutefois, dans le cas d'un polyèdre idéal, les longueurs d'arêtes sont infinies.
On peut contourner cette difficulté en intersectant le polyèdre avec une horosphère pour tronquer chaque sommet. La forme obtenue n'est pas elle-même un polyèdre, car les faces tronquées ne sont pas plates, mais ses arêtes sont de longueur finie. Son invariant de Dehn peut être calculé de manière normale, en ignorant les nouvelles arêtes où les faces tronquées rencontrent les faces d'origine du polyèdre . D'après la définition de l'invariant de Dehn et les contraintes sur les angles dièdres se rencontrant en un seul sommet d'un polyèdre idéal, le résultat de ce calcul ne dépend pas du choix de l'horosphère utilisée pour tronquer les sommets.[10],[11]
Structure combinatoire
Comme l'a prouvé Ernst Steinitz, l'ensemble stable maximum de tout polyèdre idéal (le plus grand sous-ensemble possible de sommets non adjacents) contient au plus la moitié des sommets du polyèdre[12]. Il ne peut contenir exactement la moitié des sommets que lorsque ceux-ci peuvent être partitionnés en deux ensembles indépendants de même taille, autrement dit si le graphe du polyèdre est un graphe biparti équilibré, comme c'est le cas pour un cube idéal[12],[13]. Un résultat plus fort indique que le graphe de tout polyèdre idéal est 1-dur, ce qui signifie que, pour tout , supprimer sommets du graphe ne laisse qu'au plus composantes connexes.[13],[14]

Par exemple, le graphe du dodécaèdre rhombique est bipartite, mais a un ensemble indépendant contenant plus de la moitié de ses sommets, et le triakitétraèdre a un ensemble indépendant contenant exactement la moitié des sommets mais sans être bipartite. Ni l'un ni l'autre ne peuvent être représentés comme polyèdres idéaux[12],[13].
Histoire et caractérisation
Tous les polyèdres convexes ne sont pas combinatoirement équivalents aux polyèdres idéaux. La caractérisation géométrique des polyèdres inscrits a été tentée, sans succès, par René Descartes dans son manuscrit publié vers1630, De solidorum elementis[15]. La question de trouver une caractérisation combinatoire des polyèdres idéaux, analogue au théorème de Steinitz caractérisant les polyèdres convexes euclidiens, a été soulevée par Jakob Steiner[16] ; une caractérisation numérique (plutôt que combinatoire) a été fournie par Hodgson, Rivin & Smith[17].
Leur caractérisation est basée sur le fait que les angles dièdres d'un polyèdre idéal, incidents à un seul sommet idéal, doivent avoir des angles supplémentaires qui totalisent exactement , tandis que les angles supplémentaires traversés par toute courbe de Jordan à la surface du polyèdre qui a plus d'un sommet sur ses deux côtés doivent être plus grands. Par exemple, pour le cube idéal, les angles dièdres sont de et leurs supplémentaires sont de . Les trois angles supplémentaires à un seul sommet totalisent mais les quatre angles traversés par une courbe à mi-chemin entre deux faces opposées totalisent , et d'autres courbes croisent encore plus de ces angles avec des sommes encore plus grandes. Hodgson et al. montrent qu'un polyèdre convexe est équivalent à un polyèdre idéal si et seulement s'il est possible d'attribuer des nombres à ses arêtes avec les mêmes propriétés : ces nombres sont tous compris entre et , ils somment à en chaque sommet, et ils somment à plus de sur chaque cycle non facial du graphe dual . Lorsqu'une telle affectation existe, il existe un polyèdre idéal unique dont les angles dièdres sont supplémentaires à ces nombres. Par conséquent, la réalisabilité en tant que polyèdre idéal peut être exprimée sous la forme d'un problème d'optimisation linéaire ayant un nombre exponentiel de contraintes (une pour chaque cycle non facial) et peut être décidée en temps polynomial à l'aide de l'algorithme ellipsoïde[17],[18],[19].




Une caractérisation plus combinatoire a été fournie par Dillencourt et al. pour le cas particulier des polyèdres simples, polyèdres ayant seulement trois faces et trois arêtes se rencontrant à chaque sommet idéal. Selon leur caractérisation, un polyèdre simple est idéal ou inscriptible si et seulement si l'une des deux conditions suivantes est remplie : soit le graphe du polyèdre est un graphe biparti et son graphe dual est 4-connexe, soit c'est un graphe 1-super-dur . Dans cette condition, être 1-super-dur est une variation de la dureté du graphe ; cela signifie que, pour chaque ensemble de plus d'un sommet du graphe, la suppression de du graphe laisse un nombre de composantes connexes strictement inférieur à . Sur la base de cette caractérisation, ils exposent un algorithme combinatoire en temps linéaire pour tester la réalisabilité de polyèdres simples en tant que polyèdres idéaux[20].


Pavages




Le tétraèdre, le cube, l'octaèdre et le dodécaèdre réguliers idéaux ayant tous des angles dièdres fractions entières de , ils peuvent tous paver l'espace hyperbolique, formant un pavage de l'espace régulier. En cela, ils diffèrent des polyèdres réguliers euclidiens, dont seul le cube peut paver l'espace. Le tétraèdre, le cube, l'octaèdre et le dodécaèdre idéaux forment respectivement le pavage tétraédrique d'ordre 6, le pavage cubique d'ordre 6, le pavage octaédrique d'ordre 4 et le pavage dodécaédrique d'ordre 6. L'ordre du pavage étant ici égal au nombre de cellules concourantes en chaque arrête. On notera que l'icosaèdre idéal ne peut pas paver l'espace[8],[21],[22].
La décomposition d'Epstein-Penner[21] peut être utilisé pour décomposer n'importe quelle 3-variété hyperbolique à points de rebroussements en polyèdres idéaux, et pour représenter la variété résultant du collage de ces polyèdres idéaux. Toute variété pouvant être ainsi décomposée a un nombre fini de représentations.[23] Le revêtement universel de la variété hérite de la même décomposition, qui forme un pavage de polyèdres idéaux. Des exemples de variétés à rebroussements, conduisant ainsi à des pavages, apparaissent naturellement comme les compléments de nœuds de liens hyperboliques, qui ont un point de rebroussement pour chaque composante du lien. Par exemple, le complément du nœud en huit est ainsi associé au pavage tétraédrique d'ordre 6 et le complément des anneaux borroméens est associé de la même manière au pavage octaédrique d'ordre 4. Ces deux pavages, ainsi que trois autres utilisant le cuboctaèdre idéal, le prisme triangulaire et le tétraèdre tronqué, apparaissent dans l'étude des groupes de Bianchi et proviennent de variétés à rebroussements apparaissant comme quotients d'espace hyperbolique par des sous-groupes des groupes de Bianchi. De telles variétés peuvent également être interprétées comme des compléments de lien[24],[25].
Variété de surface
La surface d'un polyèdre idéal (excluant les sommets) forme une variété de dimension 2, topologiquement équivalente à une sphère perforée. La géométrie hyperbolique de cette surface est uniforme. Autrement dit, les plis de la surface qui apparaissent dans son plongement dans l'espace hyperbolique sont invisibles dans la géométrie intrinsèque de la surface.
Cette surface pouvant être partitionnée en triangles idéaux, son aire est donc finie. Inversement, et de manière analogue au théorème d'unicité d'Alexandrov, toute variété bidimensionnelle à géométrie hyperbolique uniforme et à aire finie, combinatoirement équivalente à une sphère à perforation finie, peut être vue comme la surface d'un polyèdre idéal. (Comme avec le théorème d'Alexandrov, on doit inclure parmi les surfaces possibles les dièdres idéaux.)[26],[27] De ce point de vue, la théorie des polyèdres idéaux a des liens étroits avec les approximations discrètes des applications conformes[28].
Les surfaces des polyèdres idéaux peuvent également être considérées de manière plus abstraite comme des espaces topologiques formés en collant ensemble des triangles idéaux par isométrie le long de leurs bords. Pour toute surface de ce type, et pour toute courbe fermée ne s'enroulant pas simplement autour d'un seul sommet du polyèdre (une ou plusieurs fois) sans séparer les autres, il existe une géodésique unique sur la surface qui est homotope à la courbe donnée. À cet égard, les polyèdres idéaux sont différents des polyèdres euclidiens (et de leurs modèles de Klein euclidiens): par exemple, sur un cube euclidien, toute géodésique peut traverser au plus deux arêtes incidentes à un seul sommet consécutivement, avant de traverser une arête non incidente, mais les géodésiques sur le cube idéal ne sont pas limitées de la sorte[29].
Voir aussi
- Polyèdre canonique, un polyèdre dans lequel chaque arête est tangente à une sphère commune
Références
- William P. Thurston et Silvio Levy (éditeur), Three-dimensional geometry and topology, Princeton University Press, 1997- (ISBN 0-691-08304-5 et 978-0-691-08304-9, OCLC 35849030, lire en ligne)
- (en) Craig D. Hodgson, Igor Rivin et Warren D. Smith, « A characterization of convex hyperbolic polyhedra and of convex polyhedra inscribed in the sphere », Bulletin of the American Mathematical Society, vol. 27, no 2, , p. 246–251 (ISSN 0273-0979 et 1088-9485, DOI 10.1090/S0273-0979-1992-00303-8, lire en ligne, consulté le )
- (en) Undine Leopold, Vertex-transitive polyhedra in three-space (thèse de doctorat), Boston, Northeastern University, (lire en ligne), Vertex-transitive polyhedra in three-space
- (en) Arnau Padrol et Günter M. Ziegler, « Six Topics on Inscribable Polytopes », dans Advances in Discrete Differential Geometry, Springer Berlin Heidelberg, (ISBN 978-3-662-50446-8, DOI 10.1007/978-3-662-50447-5_13, lire en ligne), p. 407–419, paragraphe "Combinatorial Structure"
- (en) Michael B. Dillencourt et Warren D. Smith, « Graph-theoretical conditions for inscribability and Delaunay realizability », Discrete Mathematics, vol. 161, nos 1-3, , p. 63–77 (DOI 10.1016/0012-365X(95)00276-3, lire en ligne, consulté le )
- (en) David Eppstein et Michael B. Dillencourt, « Uninscribable 4-Regular Polyhedron », sur Electronic Geometry Models, , No. 2003.08.001
- (en) L. Fejes Tóth, « Some Researches Inspired by H. S. M. Coxeter », dans The Geometric Vein, Springer New York, (ISBN 978-1-4612-5650-2, DOI 10.1007/978-1-4612-5648-9_18, lire en ligne), p. 271–277
- (en) Harold Scott MacDonald Coxeter, « Regular honeycombs in hyperbolic space », Proceedings of the International Congress of Mathematicians, vol. III, , p. 155-159
- (en) Yunhi Cho et Hyuk Kim, « On the Volume Formula for Hyperbolic Tetrahedra », Discrete & Computational Geometry, vol. 22, no 3, , p. 347–366 (ISSN 0179-5376, DOI 10.1007/PL00009465, lire en ligne, consulté le )
- (en) Johan L. Dupont et Chih-Han Sah, « Scissors congruences, II », Journal of Pure and Applied Algebra, vol. 25, no 2, , p. 159–195 (DOI 10.1016/0022-4049(82)90035-4, lire en ligne, consulté le )
- (en) David Coulson, Oliver A. Goodman, Craig D. Hodgson et Walter D. Neumann, « Computing Arithmetic Invariants of 3-Manifolds », Experimental Mathematics, vol. 9, no 1, , p. 127–152 (ISSN 1058-6458 et 1944-950X, DOI 10.1080/10586458.2000.10504641, lire en ligne, consulté le )
- « Über isoperimetrische Probleme bei konvexen Polyedern. », Journal für die reine und angewandte Mathematik (Crelles Journal), vol. 1928, no 159, , p. 133–143 (ISSN 0075-4102 et 1435-5345, DOI 10.1515/crll.1928.159.133, lire en ligne, consulté le )
- (en) Arnau Padrol et Günter M. Ziegler, « Six Topics on Inscribable Polytopes », dans Advances in Discrete Differential Geometry, Springer Berlin Heidelberg, (ISBN 978-3-662-50446-8, DOI 10.1007/978-3-662-50447-5_13, lire en ligne), p. 407–419
- (en) Michael B. Dillencourt, « Toughness and Delaunay triangulations », Discrete & Computational Geometry, vol. 5, no 6, , p. 575–601 (ISSN 0179-5376 et 1432-0444, DOI 10.1007/BF02187810, lire en ligne, consulté le )
- (en) Pasquale Joseph Federico, Descartes on Polyhedra: A Study of the "De solidorum elementis", Springer, coll. « Sources in the History of Mathematics and Physical Sciences » (no 4), , p.52
- (de) Jakob Steiner, Systematische Entwicklung der Abhängigkeit geometrischer Gestalten von einander, Berlin, G. Fincke, (lire en ligne), p.316
- (en) Craig D. Hodgson, Igor Rivin et Warren D. Smith, « A characterization of convex hyperbolic polyhedra and of convex polyhedra inscribed in the sphere », Bulletin of the American Mathematical Society, vol. 27, no 2, , p. 246–251 (ISSN 0273-0979 et 1088-9485, DOI 10.1090/S0273-0979-1992-00303-8, lire en ligne, consulté le )
- Igor Rivin, « A Characterization of Ideal Polyhedra in Hyperbolic 3-Space », Annals of Mathematics, vol. 143, no 1, , p. 51–70 (ISSN 0003-486X, DOI 10.2307/2118652, lire en ligne, consulté le )
- (en) François Guéritaud, « On an Elementary Proof of Rivin's Characterization of Convex Ideal Hyperbolic Polyhedra by their Dihedral Angles », Geometriae Dedicata, vol. 108, no 1, , p. 111–124 (ISSN 0046-5755 et 1572-9168, DOI 10.1007/s10711-004-3180-y, lire en ligne, consulté le )
- (en) Michael B. Dillencourt et Warren D. Smith, « A LINEAR-TIME ALGORITHM FOR TESTING THE INSCRIBABILITY OF TRIVALENT POLYHEDRA », International Journal of Computational Geometry & Applications, vol. 05, no 01n02, , p. 21–36 (ISSN 0218-1959 et 1793-6357, DOI 10.1142/S0218195995000039, lire en ligne, consulté le )
- D. B. A. Epstein et R. C. Penner, « Euclidean decompositions of noncompact hyperbolic manifolds », Journal of Differential Geometry, vol. 27, no 1, (ISSN 0022-040X, DOI 10.4310/jdg/1214441650, lire en ligne, consulté le )
- (en) Roice Nelson et Henry Segerman, « Visualizing hyperbolic honeycombs », Journal of Mathematics and the Arts, vol. 11, no 1, , p. 4–39 (ISSN 1751-3472 et 1751-3480, DOI 10.1080/17513472.2016.1263789, lire en ligne, consulté le )
- (en) Hirotaka Akiyoshi, « Finiteness of polyhedral decompositions of cusped hyperbolic manifolds obtained by the Epstein-Penner’s method », Proceedings of the American Mathematical Society, vol. 129, no 8, , p. 2431–2439 (ISSN 0002-9939 et 1088-6826, DOI 10.1090/S0002-9939-00-05829-9, lire en ligne, consulté le )
- (en) Allen Hatcher, « Hyperbolic Structures of Arithmetic Type on Some Link Complements », Journal of the London Mathematical Society, vol. s2-27, no 2, , p. 345–355 (DOI 10.1112/jlms/s2-27.2.345, lire en ligne, consulté le )
- (en) Steve Abbott, « Not knot (video), directed by Charlie Gunn and Delle Maxwell. 16 minutes. £23.95. 1995 (ISBN 3-86025-754-4). (Geometry Center/Spektrum Videothek). - Supplement to Not knot, by David Epstein and Charlie Gunn. Pp. 48. Free with video. 1991 (ISBN 0-86720-297-1). (Geometry Center/Jones and Bartlett, Boston MA) », The Mathematical Gazette, vol. 81, no 491, , p. 340–342 (ISSN 0025-5572 et 2056-6328, DOI 10.2307/3619248, lire en ligne, consulté le )
- Igor Rivin, « Intrinsic geometry of convex ideal polyhedra in hyperbolic 3-space », arXiv:math/0005234, (lire en ligne, consulté le )
- (en) Boris Springborn, « Ideal Hyperbolic Polyhedra and Discrete Uniformization », Discrete & Computational Geometry, vol. 64, no 1, , p. 63–108 (ISSN 0179-5376 et 1432-0444, DOI 10.1007/s00454-019-00132-8, lire en ligne, consulté le )
- (en) Alexander I Bobenko, Ulrich Pinkall et Boris A Springborn, « Discrete conformal maps and ideal hyperbolic polyhedra », Geometry & Topology, vol. 19, no 4, , p. 2155–2215 (ISSN 1364-0380 et 1465-3060, DOI 10.2140/gt.2015.19.2155, lire en ligne, consulté le )
- C. Charitos, « Closed Geodesics on Ideal Polyhedra of Dimension 2 », Rocky Mountain Journal of Mathematics, vol. 26, no 2, (ISSN 0035-7596, DOI 10.1216/rmjm/1181072071, lire en ligne, consulté le )
 Portail de la géométrie
Portail de la géométrie