wikiHow est un wiki, ce qui veut dire que de nombreux articles sont rédigés par plusieurs auteurs(es). Pour créer cet article, 31 personnes, certaines anonymes, ont participé à son édition et à son amélioration au fil du temps.
Cet article a été consulté 47 170 fois.
À la différence d'une équation affine ou linéaire, une équation différentielle est une équation dont les solutions sont, non pas des valeurs numériques, mais des fonctions. Une telle équation est une relation entre ces fonctions inconnues et leurs dérivées successives. Pour faire simple, une fonction met en relation des valeurs, tandis que sa dérivée est une autre fonction qui permet d'étudier, sur un intervalle bien défini à l'avance, le taux (ou la vitesse) de variation de ces mêmes valeurs. C'est à cause de ce mélange des fonctions et de leurs dérivées qu'une équation différentielle n'est jamais très simple à résoudre.
Dans cet article, nous allons voir certaines techniques pour résoudre des équations différentielles classiques, les solutions seront essentiellement des fonctions élémentaires, comme des fonctions polynomiales, exponentielles, logarithmiques ou encore trigonométriques, ou leurs réciproques. Les équations différentielles sont présentes dans de très nombreux domaines, parfois éloignés les uns des autres (démographie, électronique, physique du mouvement, cosmologie…) dès lors qu'un phénomène implique des variations dans le temps ou l'espace. Certaines sont (assez) faciles à résoudre, tandis que d'autres exigent des méthodes de résolution très savantes, basées en partie sur une discussion préalable. Les solutions sont alors des fonctions peu courantes, des séries entières ou une approximation de la fonction qui est solution (algorithme de résolution).
La lecture de cet article suppose une bonne connaissance du calcul infinitésimal (calcul différentiel et intégral) et des dérivées partielles. Une certaine maitrise de l'algèbre linéaire est aussi nécessaire, en particulier pour comprendre ce qui se cache, théoriquement parlant, derrière les équations différentielles d'ordre deux. Dans la deuxième partie des résolutions, il est fréquent de retomber sur un terrain mieux connu, à savoir l'analyse.
Considérations préliminaires sur les équations différentielles
- Les équations différentielles sont de différents types. Dans cet article, nous ne traiterons à fond que les équations différentielles ordinaires n'impliquant que des fonctions à une seule variable et leurs dérivées. Les équations différentielles ordinaires sont plus faciles à comprendre et à résoudre que les équations aux dérivées partielles qui, elles, impliquent des fonctions avec plusieurs variables. La résolution de ces dernières équations ne sera pas abordée ici, car les méthodes à utiliser changent pratiquement pour chaque équation.
- Vous trouverez ci-dessous deux exemples d'équations différentielles ordinaires :
- Vous trouverez ci-dessous deux exemples d'équation aux dérivées partielles :
- Vous trouverez ci-dessous deux exemples d'équations différentielles ordinaires :
- L’ordre d'une équation différentielle est en fait l'ordre (la puissance, si vous préférez) le plus élevé de toutes les dérivées contenues dans l'équation. La toute première équation de cet article est une équation d'ordre un, tandis que la suivante est une équation d'ordre deux. En parallèle, le degré d'une équation est la puissance la plus élevée d'un terme de l'équation.
- Ainsi, l'équation ci-dessous est une équation du second degré d'ordre trois :
- Ainsi, l'équation ci-dessous est une équation du second degré d'ordre trois :
- Une équation différentielle est dite linéaire si le degré de la fonction et celui de ses dérivées sont 1. Dans tous les autres cas, l'équation est dite non linéaire. Les équations linéaires se distinguent par le fait qu'elles ont des solutions qui, ajoutées les unes aux autres en une combinaison linéaire, permettent de trouver d'autres solutions.
- Vous trouverez ci-dessous deux exemples d'équations différentielles linéaires :
- Vous trouverez ci-dessous deux exemples d'équations différentielles non linéaires, la première est non linéaire à cause de la présence de la fonction sinus.
- Vous trouverez ci-dessous deux exemples d'équations différentielles linéaires :
- Les solutions générales des équations différentielles ordinaires ne sont pas uniques, mais comportent ce que l'on appelle des constantes arbitraires. Dans la plupart des cas, le nombre de ces dernières est le même que l'ordre de l'équation. En pratique, ces constantes sont déterminées par les conditions initiales données, à savoir la fonction et ses dérivées, le plus souvent en . Dans la plupart des cas, le nombre de conditions initiales requis pour trouver une solution particulière d'une équation différentielle est égal à la valeur de l'ordre de l'équation.
- L'équation ci-dessous sera utilisée plus loin comme support concret de la résolution d'une telle équation. C'est donc une équation différentielle linéaire d'ordre deux. Sa solution générale contient donc deux constantes arbitraires. Pour évaluer ces dernières, nous avons besoin de conditions initiales pour et . Ces conditions initiales sont généralement données pour , mais ce peut être une autre valeur. La question des solutions particulières établies grâce aux conditions initiales sera abordée plus loin dans l'article.
- L'équation ci-dessous sera utilisée plus loin comme support concret de la résolution d'une telle équation. C'est donc une équation différentielle linéaire d'ordre deux. Sa solution générale contient donc deux constantes arbitraires. Pour évaluer ces dernières, nous avons besoin de conditions initiales pour et . Ces conditions initiales sont généralement données pour , mais ce peut être une autre valeur. La question des solutions particulières établies grâce aux conditions initiales sera abordée plus loin dans l'article.














Étapes
Partie 1
Partie 1 sur 2:Résoudre des équations d'ordre un
-
1Résolvez des équations linéaires d'ordre un. Dans cette partie, nous allons voir les méthodes de résolution d'une équation différentielle linéaire d'ordre un, et dans le cas général et dans certains cas particuliers, notamment quand certains termes sont égaux à 0. Soit , et , toutes trois, comme cela se remarque, fonctions de .
avec comme condition initiale . Selon le théorème fondamental de l'analyse, l'intégrale de la dérivée d'une fonction est la fonction elle-même. Dit plus simplement, si vous prenez l'intégrale de la dérivée, vous obtenez votre réponse. Souvenez-vous qu'évaluer une intégrale indéfinie amène à introduire une constante arbitraire. avec comme condition initiale . Nous allons utiliser la technique de la séparation des variables. Elle ne peut être mise en œuvre que lorsque chacune des variables apparait dans un membre distinct de l'équation. Ainsi, nous allons déplacer tous les termes contenant d'un côté de l'égalité, et tous les termes contenant de l'autre côté. Les objets et peuvent être intégrés ou dérivés sans introduire de structure ambiante supplémentaire dérivée. Gardez cependant à l'esprit que ce que nous faisons là est une sorte de tour de passepasse qui permet de tirer parti du théorème de dérivation des fonctions composées. La nature exacte de ces objets, que l'on nomme formes différentielles, ne sera pas évoquée ici, faute de place, seul nous intéresse le théorème.
- En premier lieu, il faut regrouper les variables ( et ) de part et d'autre du signe « = » :
- Intégrez chacun des membres de l'équation. L'intégration introduit une constante arbitraire de chaque côté, mais il est possible par la suite de les grouper à droite.
-
Exemple 1.1. Lors de l'étape précédente, nous avons utilisé la loi des exposants qui veut, entre autres, que : . Remplaçons à présent par , car c'est une constante arbitraire.
étant entendu que et . Pour résoudre le cas général, nous allons introduire le facteur intégrant , en fait une fonction de qui permet de résoudre plus facilement l'équation en écrivant le membre de gauche sous la forme d'une dérivée commune.
- Multipliez chacun des membres par .
- Afin de n'avoir qu'une seule dérivée dans le membre de gauche, nous devons procéder ainsi :
- La dernière équation implique que . C'est ce dernier facteur intégrant qui permet de résoudre toute équation linéaire d'ordre un. Il est alors possible de dériver facilement selon , les calculs sont alors grandement simplifiés. Nous sommes passés ainsi d'une différentielle inexacte à une différentielle exacte.
-
Exemple 1.2 : nous allons ici voir comment trouver une solution particulière à l'équation différentielle en nous aidant d'une ou plusieurs conditions initiales.
-
2Résolvez des équations non linéaires d'ordre un. Dans cette partie, nous allons voir les méthodes de résolution de certaines équations différentielles non linéaires d'ordre un. Il n'est pas possible d'obtenir une solution générale d'un seul tenant, mais certaines équations peuvent être résolues en utilisant d'autres techniques :
avec . Si la fonction peut se décomposer en fonctions ayant chacune une variable, alors l'équation est dite « à variables séparables ». On peut alors procéder avec la même méthode que précédemment :-
Exemple 1.3.
avec . Soit et des fonctions de et de . Partant, une équation différentielle homogène est une équation dans laquelle et sont des fonctions homogènes de même degré. Tout cela pour dire que la fonction satisfait la propriété , étant ce que l'on appelle le degré d'homogénéité. Toute équation différentielle homogène peut être transformée en une équation connue en effectuant un changement de fonction inconnue, en posant, par exemple, ou .
-
Exemple 1.4 : la discussion précédente sur le thème de l'homogénéité peut sembler complexe au premier abord. Il suffit dès lors de prendre un exemple concret pour mieux cerner le concept.
- Nous pouvons donc voir que c'est une équation non linéaire du point de vue de . Nous pouvons également constater que cette équation n'est pas à variables séparables. Cependant, c'est quand même bien une équation différentielle homogène, puisque le numérateur et le dénominateur sont homogènes (du troisième degré). En conséquence, il est possible de procéder au changement de variable en posant, par exemple, :
- . C’est devenu une équation à variables séparables en .
avec . C'est l'équation différentielle de Bernoulli, un exemple particulier d'équation linéaire d'ordre un, dont les solutions peuvent être présentées sous la forme de fonctions génériques (aussi appelées « élémentaires »).
- Multipliez par .
- Dans le membre de gauche, servez-vous du théorème de dérivation des fonctions composées pour convertir l'équation en une équation linéaire en , laquelle pourra être résolue avec une de techniques vues précédemment.
avec . Nous n'évoquerons ici que des équations différentielles exactes. Notre but est de trouver une fonction , aussi dite harmonique, telle que .
- Pour remplir cette condition, nous avons la dérivée totale ci-dessous. La dérivée totale permet de déterminer les dépendances avec une autre variable. Pour calculer la dérivée totale de par rapport à , nous ne devons pas écarter l'idée que puisse éventuellement dépendre de .
- Si l'on compare les termes, nous avons d'un côté , et de l'autre . En calcul vectoriel, une équation différentielle est exacte quand les dérivées croisées des solutions sont absolument égales. Cette proposition est connue sous le nom de théorème de Schwarz, de Clairaut ou encore de Young. L'équation différentielle est dite exacte si la condition ci-dessous est établie :
- La méthode de résolution des équations exactes est apparentée à celle des fonctions harmoniques que nous n'évoquerons ici que très brièvement. Il convient dès lors d'intégrer d'abord par rapport à . Comme est à la fois une fonction de et de , l'intégration ne permet que la récupération partielle de , dont le terme se doit d'être retenu. Il y a également une constante d'intégration qui est une fonction de .
- Nous allons prendre la dérivée partielle de notre résultat par rapport à , puis comparer chaque terme de celle-ci avec , et enfin intégrer afin d'obtenir . Vous pouvez aussi commencer par intégrer , puis prendre la dérivée partielle du résultat par rapport à afin de résoudre la fonction arbitraire . Les deux méthodes fonctionnent, mais celle de l'intégration est la plus pratiquée.
-
Exemple 1.5. Nous pouvons vérifier que l'équation ci-dessous est exacte en faisant les dérivées partielles.
- Si l'équation différentielle est inexacte, alors, sous certaines conditions, il est possible de trouver une fonction de type facteur intégrant qui la transformera en différentielle exacte. Cependant, ces équations ne sous-tendent pas encore d'applications concrètes, car les facteurs d'intégration, qui existent assurément, ne sont pas très faciles à trouver, tant s'en faut. Comme nous touchons ici au cas par cas, nous ne développerons pas cet aspect, car cela nous emmènerait trop loin.
Publicité




















































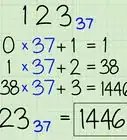
![v(x)={\sqrt[ {3}]{-3\ln x+C}}](./images/2084446136-823f9c5e9ba9e40debfce3348d25e80a09873362.webp)
![y(x)=x{\sqrt[ {3}]{-3\ln x+C}}](./images/1986469801-7ed0df22b4993eb4510d79efc2b8e913d412360d.webp)

























Partie 2
Partie 2 sur 2:Résoudre des équations d'ordre deux
-
1Résolvez des équations linéaires homogènes à coefficients constants. Ces équations sont très importantes, car une très grande variété d'applications concrètes sont sous-tendues, à un degré ou un autre, par ces équations. Dans cette appellation, « homogène » veut simplement dire que l'équation est égale à 0. Nous avons vu dans la partie précédente comment résoudre les équations différentielles non homogènes correspondantes. Ci-dessous, et sont des constantes :
L'équation caractéristique : c'est un élément important de la résolution, car elle la facilite, à la condition de pouvoir déduire les propriétés que peuvent avoir ses solutions. Cette équation nous montre que et ses dérivées sont toutes proportionnelles les unes par rapport aux autres. Nous savons à présent, exemples précédents à l'appui, qu'une seule fonction exponentielle a cette propriété. En conséquence, nous nous servirons d'un ansatz, c'est-à-dire d'une solution qui marche, une sorte de conjecture.
- L'ansatz est la fonction exponentielle , dans laquelle est une constante à déterminer. En la plaçant dans l'équation, on obtient l'équation suivante :
- Cette équation nous expose le produit d'une fonction exponentielle par un polynôme, lequel produit est donc égal à 0. Or, par définition, une fonction exponentielle ne peut jamais être égale 0. En conséquence, seul le polynôme est égal à 0. Vous voyez que nous avons donc réussi à transformer un problème d'équation différentielle en un problème somme toute classique d'équation du second degré, ce qui, reconnaissons-le, est plus facile à résoudre.
- et
- Nous obtenons donc deux racines. Comme cette équation différentielle est linéaire, la solution générale est donc une combinaison linéaire de solutions individuelles. Comme c'est une équation d'ordre deux, nous en concluons, selon la théorie, qu'il n'y a qu'une seule solution générale, il serait vain d'en chercher d'autres. Pour plus de détails sur cet aspect des choses, reportez-vous à des manuels sur les théorèmes qui établissent l'existence et l'unicité des solutions.
- Il existe une façon de vérifier que deux solutions sont linéairement indépendantes et elle consiste à utiliser le wronskien (). Il s'agit du déterminant d'une matrice dont chaque colonne, et il y en a autant que de solutions, est constituée d'une solution, puis de sa dérivée. En algèbre linéaire, il est un théorème qui établit que les fonctions dans une matrice wronskienne sont linéairement dépendantes si le wronskien s'annule en un point. L'inverse de cette proposition est donc que deux solutions sont linéairement indépendantes quand le wronskien ne s'annule pas. Le wronskien sera d'une importance bien plus capitale quand il faudra résoudre (par le biais de la variation des paramètres) des équations différentielles non homogènes avec coefficients constants.
- En algèbre linéaire, l'ensemble des solutions de cette équation différentielle décrit un espace vectoriel dont la dimension est l'ordre de l'équation différentielle. Les solutions constituent une famille et sont, par définition, linéairement indépendantes les unes des autres. Ceci est possible, car la fonction agit à la manière d'un opérateur linéaire. La dérivée est donc un opérateur linéaire, car elle entraine que l'espace des fonctions différentiables est appliqué à l'espace de toutes les fonctions. Cette équation est homogène, car, pour tout opérateur linéaire , nous cherchons des solutions à l'équation .
Ceci posé, il est possible d'étudier deux des trois types de racines possibles. Le cas des racines doubles ne pourra être résolu qu'avec l'étude ultérieure de la réduction d'ordre.
Premier cas : deux racines réelles et distinctes. Si et sont à la fois réelles et distinctes, alors la solution de l'équation différentielle est la suivante :Second cas : deux racines complexes. C'est un corolaire de ce théorème fondamental de l'algèbre qui pose que les solutions d'une équation polynomiale ayant des coefficients réels sont des solutions soit réelles soit des paires de valeurs conjuguées. C'est ainsi que si est une solution de l'ensemble des complexes et est une racine de l'équation caractéristique, alors est aussi une racine. Nous pouvons alors inscrire la solution sous la forme , mais cette solution appartient à l'ensemble des complexes et ne convient donc pas pour une équation différentielle à coefficients réels.
- Nous pouvons aussi utiliser la formule d'Euler qui permet d'écrire la solution sous forme de fonctions trigonométriques.
- Après factorisation, nous allons remplacer, d'une part, la somme par et d'autre part, par . Cela nous conduit à la solution suivante :
- Il y a également une autre façon d'écrire la solution, sous forme d'amplitude et de phase, ce qui est le cas, vous l'aurez reconnu, dans certaines applications en physique. Sur Internet ou dans un manuel, vous trouverez des détails sur la façon de calculer.
-
Exemple 2.1 : trouvez la solution à l'équation différentielle ci-dessous connaissant deux conditions initiales. Pour y parvenir, nous devons utiliser notre solution et sa dérivée, puis faire l'application avec les conditions initiales dans les deux équations afin de déterminer les constantes arbitraires.
- L'ansatz est la fonction exponentielle , dans laquelle est une constante à déterminer. En la plaçant dans l'équation, on obtient l'équation suivante :
-
2Utilisez la méthode de la réduction d'ordre. Quand une solution linéaire indépendante est déjà connue, la réduction d'ordre est une technique de résolution des équations différentielles. La méthode fonctionne en diminuant l'ordre de l'équation d'une unité, ce qui permet la résolution selon une des techniques évoquées dans la partie précédente. Supposons que soit une solution connue. L'intérêt de la réduction d'ordre est de trouver une solution de la forme ci- dessous, dans laquelle est une fonction qui devra être déterminée. Cette solution sera rentrée dans l'équation différentielle afin de déterminer . Plus loin, nous verrons comment la réduction d'ordre peut aussi être utilisée pour résoudre une équation différentielle avec coefficients constants ayant des racines doubles.
Les racines doubles d'une équation différentielle homogène avec coefficients constants : souvenez-vous qu'une équation d'ordre deux doit avoir deux solutions linéairement indépendantes. Si l'équation caractéristique a pour solution une racine double, alors il est impossible de déterminer la totalité des solutions, car ces dernières sont linéairement dépendantes. Nous devons donc recourir à la réduction d'ordre pour déterminer la seconde solution linéairement indépendante.
- Posons que soit la racine double de l'équation caractéristique. Nous supposerons que la seconde solution est de la forme , solution qui va être mise dans l'équation différentielle. Nous nous apercevons alors que tous les termes s'annulent, sauf le terme contenant la dérivée seconde de .
-
Exemple 2.2 : Prenons comme exemple l'équation ci-dessous qui admet une racine double, à savoir . Par chance, l'application numérique fait que beaucoup de termes s'annulent :
- Comme avec l'ansatz pour l'équation différentielle à coefficients constants, seule la dérivée seconde peut être égale à 0. Le fait d'intégrer deux fois de suite permet d'exprimer simplement .
- La solution générale d'une équation différentielle avec coefficients constants, dont l'équation caractéristique à pour solution une racine double peut être écrite comme ci-dessous. Pour vous en souvenir, vous pouvez mentalement multiplier le second terme par pour prouver l'indépendance linéaire. Comme cet ensemble est linéairement indépendant, nous sommes en possession de toutes les solutions de cette équation, le travail est terminé.
avec . La réduction d'ordre ne peut être utilisée qu'à la condition de déjà connaitre une solution de l'équation, ici , cette solution aura été donnée dans le problème ou bien trouvée par un autre moyen (intuition, expérience).
- Nous cherchons donc une solution sous la forme et faisons l'application numérique dans l'équation.
- Comme est d'ores et déjà une solution de l'équation différentielle, les termes contenant disparaissent. Il vous reste alors une équation linéaire d'ordre un. Pour que ce soit encore plus parlant, changez les variables en posant .
- Si l'intégration est possible, alors vous obtiendrez la solution générale sous forme de fonctions élémentaires. Sinon, la solution peut être laissée sous sa forme d'intégrale.
- Posons que soit la racine double de l'équation caractéristique. Nous supposerons que la seconde solution est de la forme , solution qui va être mise dans l'équation différentielle. Nous nous apercevons alors que tous les termes s'annulent, sauf le terme contenant la dérivée seconde de .
-
3Étudiez l'équation d'Euler-Cauchy. C'est un exemple particulier d'équation différentielle d'ordre deux avec coefficients non constants qui donne des solutions exactes. Cette équation apparait dans certaines applications, comme la résolution d'une équation de Laplace en coordonnées sphériques.
L'équation caractéristique : la structure de cette équation différentielle est telle que chaque terme est multiplié par un terme dont la puissance est égale à l'ordre de la dérivée.
- Partant de ce constat, il convient d'essayer une conjecture (ansatz) du type , étant à déterminer, exactement comme cela a été fait avec l'emploi d'une fonction exponentielle dans la résolution d'une équation différentielle linéaire avec coefficients constants. Après dérivation et substitution, nous arrivons à l'égalité suivante :
- À ce stade, nous devons supposer que afin de pouvoir utiliser l'équation caractéristique de l'équation différentielle. Le point est appelé « point singulier régulier » de l'équation différentielle, une propriété qui s'avère très importante pour résoudre des équations différentielles à l'aide de séries entières. Cette équation admet deux racines qui peuvent être réelles et distinctes, doubles ou encore des conjuguées d'un nombre complexe.
-
et
-
et
Premier cas : deux racines réelles et distinctes. Si et sont réelles et distinctes, alors la solution de l'équation différentielle est la suivante :
Deuxième cas : deux racines complexes. Si étaient les solutions de l'équation caractéristique, alors la solution à trouver serait une fonction complexe.
- Pour la transformer en fonction réelle, il faut opérer un changement de variables (cela implique que ) et utiliser la formule d'Euler. Cette façon de procéder a été vue précédemment avec la réassignation des constantes arbitraires.
- La solution générale peut alors s'écrire comme suit :
Troisième cas : des racines doubles. Pour obtenir la seconde solution linéairement indépendante, nous devons à nouveau recourir à la réduction d'ordre.
- Certes, il y a des calculs, mais le principe reste le même : il faut faire l'application en posant , étant la première solution. Des termes s'annulent et il ne reste plus que l'équation suivante :
- C'est une équation linéaire d'ordre un en . La solution est
. La réponse peut aussi être formulée comme ci-dessous et pour vous souvenir de cette solution, linéairement indépendante, il vous suffit d'ajouter le terme .
- Partant de ce constat, il convient d'essayer une conjecture (ansatz) du type , étant à déterminer, exactement comme cela a été fait avec l'emploi d'une fonction exponentielle dans la résolution d'une équation différentielle linéaire avec coefficients constants. Après dérivation et substitution, nous arrivons à l'égalité suivante :
-
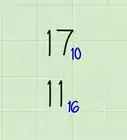
4Résolvez des équations linéaires non homogènes. Il est sous-entendu que les coefficients sont constants. Dans ces cas-là, vous aurez affaire avec une équation du type , dans laquelle est appelé terme source. Conformément à la théorie des équations différentielles, la solution générale à cette équation est la superposition de la solution particulière et de la solution complémentaire . Ici, la solution particulière, ce qui ne facilite pas les choses, n'est pas la solution répondant aux conditions initiales, mais bien plutôt la solution qui existe en tant que résultat d'un terme non homogène. Quant à elle, la solution complémentaire correspond a la solution de l'équation différentielle homogène, lorsque que . Vous devez démontrer que la solution générale est une superposition de ces deux solutions en écrivant :
et comme , cette superposition est dès lors la solution générale.La méthode des coefficients indéterminés : elle peut être mise en œuvre quand le terme source est une combinaison de termes exponentiels, trigonométriques, hyperboliques ou élevés à une puissance. Ces termes sont les seuls à avoir un nombre fini de dérivées linéairement indépendantes. Dans cette partie, nous ne nous intéresserons qu'à la découverte de la solution particulière.
- Comparez les termes en et les termes en , sans tenir compte des constantes multiplicatives. Il faut alors envisager les trois cas possibles.
- Aucun des termes n'est identique. La solution particulière consistera en une combinaison linéaire des termes en et de leurs dérivées linéairement indépendantes.
- contient un terme qui est fois un terme en , dans lequel est soit nul soit un entier positif, mais ce terme provient d'une racine distincte de l'équation caractéristique. Dans ce cas, consistera en une combinaison linéaire de , de ses dérivées linéairement indépendantes, mais aussi des termes de et de leurs dérivées linéairement indépendantes.
- contient un terme qui est fois un terme en , dans lequel est soit nul soit un entier positif, mais ce terme provient d'une racine double de l'équation caractéristique. Dans ce cas, consistera en une combinaison linéaire de ( étant, ici, la multiplicité de la racine) et de ses dérivées linéairement indépendantes, mais aussi des autres termes de et de leurs dérivées linéairement indépendantes.
- Écrivez sous la forme d'une combinaison linéaire des termes précédemment vus. Les coefficients de cette combinaison linéaire sont qualifiés alors d'indéterminés. Si des termes en apparaissent, alors ils peuvent alors être écartés, grâce à la présence des constantes arbitraires en . Une fois la simplification faite, faites l'application numérique avec la solution et regroupez les termes identiques.
- Calculez les coefficients. À ce stade, on se retrouve généralement face à un système d'équations algébriques relativement facile à résoudre. Une fois ce dernier résolu, est facile à trouver et l'équation est résolue.
-
Exemple 2.3 : l'équation différentielle ci-dessous est une équation différentielle non homogène avec un terme source qui contient un grand nombre, fini, de dérivées linéairement indépendantes. En conséquence, nous devons utiliser la méthode de coefficients indéterminés pour trouver la solution particulière :
La variation des paramètres : c'est une technique de résolution des équations différentielles non homogènes, surtout dans les cas où le terme source ne contient pas un nombre fini de dérivées linéairement indépendantes. Des termes sources comme et nécessitent d'employer la variation des paramètres pour trouver la solution particulière. La technique de la variation des paramètres peut éventuellement être utilisée pour résoudre des équations différentielles avec coefficients non constants, à l'exception du cas très particulier de l'équation d'Euler-Cauchy. Cette technique est moins utilisée, car la solution complémentaire ne peut généralement pas s'écrire avec des fonctions élémentaires.
- Prenons comme exemple la solution ci-dessous. Sa dérivée est indiquée sur la ligne suivante :
- Vous le voyez, la solution est une seule équation, mais avec deux inconnues. C'est pourquoi, pour la résolution, il est nécessaire d'introduire à ce stade une condition que l'on pourrait qualifier d'auxiliaire. Pour notre exemple, nous avons choisi la condition suivante :
- Il est temps de passer à la seconde équation. Après avoir remplacé et organisé les termes, il faut regrouper les termes contenant d'une part et ceux contenant d'autre part . Tous ces termes s'annulent, car et sont les solutions de l'équation homogène correspondante. Nous nous retrouvons donc avec le système d'équations ci-dessous.
- Ce système peut être présenté sous la forme d'une équation matricielle de la forme , dont la solution est . L'inverse d'une matrice s'obtient en divisant chaque coefficient par le déterminant, en inversant les coefficients de la première diagonale et en inversant le signe des coefficients de la seconde diagonale. Le déterminant de cette matrice est en fait le wronskien.
- Vous trouverez ci-dessous les formules de et de . Tout comme avec la réduction d'ordre, l'intégration entraine l'apparition d'une constante arbitraire de laquelle dépendent la solution complémentaire, puis la solution générale de l'équation différentielle.
Publicité - Comparez les termes en et les termes en , sans tenir compte des constantes multiplicatives. Il faut alors envisager les trois cas possibles.













![L[y]=0](./images/1790254900-d28d0b3b621b6b82db3020405c31e8e6192fd680.webp)


























































![L[y(x)]=f(x)](./images/2162827438-b6b55f6d871c7cd94e864ddf6dbc8d6e0ee8a3d0.webp)




![L[y_{{p}}+y_{{c}}]=L[y_{{p}}]+L[y_{{c}}]=f(x)](./images/1833115463-60f7be2a949cf279a5a28358e972322bb64ab200.webp)
![L[y_{{c}}]=0](./images/2181701735-bd8ce611d0d31a71b7aed4ec47764afc9dea7725.webp)































Discussion
Les équations différentielles, comme cela a été dit en introduction, établissent une relation entre une fonction et une ou plusieurs de ses dérivées. Dans notre monde de plus en plus évolué, les équations différentielles sont partout, car elles sous-tendent de nombreuses applications concrètes, mais comme nous vivons dans un monde à quatre dimensions, ces équations sont des équations différentielles partielles. Nous voudrions passer en revue quelques-unes de ces équations et leurs applications.
-
Les croissances et décroissances exponentielles : ces phénomènes physiques et mathématiques se rencontrent, par exemple, lors de la décomposition des éléments radioactifs (demi-vie), avec les intérêts composés d'un placement, l'évolution d'une population, la disparition de molécules médicamenteuses dans le sang ou encore dans la loi de refroidissement de Newton. Comme vous le voyez, il existe de nombreux phénomènes dont l'évolution peut être prévue dans le temps, par exemple, à un instant t donné. C'est pour cette raison que la fonction exponentielle, la solution de cette équation différentielle, est une des plus importantes fonctions que l'on croise en mathématiques ou plus généralement en sciences. Cependant, le problème devient plus complexe si l'on fait entrer en ligne de compte des facteurs connexes, comme une limitation de la croissance démographique par une politique antinataliste. Ci-dessous, est une constante qui peut être positive comme négative.
-
Le mouvement harmonique : l'oscillateur harmonique, aussi bien en mécanique classique que quantique, est un modèle physique très simple au premier abord, possédant de nombreuses applications concrètes se présentant parfois sous forme de modèles bien plus compliqués, comme le pendule simple. En mécanique classique, le mouvement harmonique simple est décrit par l'équation de Hooke qui donne à un moment donné la position d'une particule, ainsi que son accélération. Une force extérieure et une force d'amortissement peuvent être présentes dans l'analyse. Ci-dessous, est la dérivée de par rapport au temps, est un paramètre décrivant une force d'amortissement, est la fréquence angulaire du système, et enfin, est une force extérieure dépendante du temps. L'oscillateur harmonique est également présent dans certains systèmes, comme le circuit RLC (circuit électrique oscillant), on obtient alors une grande précision de la pulsation , bien plus grande que dans un oscillateur mécanique.
-
L'équation de Bessel : cette équation différentielle trouve de nombreuses applications en physique, en particulier pour résoudre l'équation d'onde, l'équation de Laplace et l'équation de Schrödinger, plus particulièrement dans les problèmes qui comportent des symétries cylindriques ou sphériques. Comme c'est une équation différentielle d'ordre deux avec coefficients non constants, mais non l'équation d'Euler-Cauchy, l'équation n'a pas de solutions pouvant être libellées sous la forme de fonctions élémentaires. Les solutions à une équation de Bessel sont des fonctions de Bessel, lesquelles sont très bien étudiées, car elles ont une multitude d'applications concrètes. Ci-dessous, est une constante, considérée comme l'ordre de la fonction de Bessel.
-
Les équations de Maxwell : avec la force électromagnétique de Lorentz, ces quatre équations de Maxwell constituent les postulats de base de l'électromagnétisme. Par paires, ce sont toutes des équations aux dérivées partielles, une paire relative au champ électrostatique (), l'autre au champ magnétostatique (). Ci-dessous, est la densité de charge, , la densité du courant, et et sont respectivement la constante électrique et la constante magnétique.
-
L'équation de Schrödinger : en mécanique quantique, l'équation de Schrödinger est l'équation fondamentale qui décrit l'évolution dans le temps du vecteur d'état d'une particule subatomique. L'équation du mouvement est fonction du comportement de l'opérateur hamiltonien (noté ), lequel décrit l'énergie du système. Il est également possible de formuler l'équation de Schrödinger d'une particule libre (non-relativiste) soumise à l'influence d'un potentiel , formulation très utile dans de nombreux systèmes physiques. En ces cas, l'équation de Schrödinger, laquelle est indépendante du temps, est légèrement modifiée, en cela que le membre de gauche () est remplacé par , dans laquelle est l'énergie de la particule. Ci-dessous, est la constante de Planck réduite (quantum d'action).
-
L'équation d'onde : les ondes nous entourent, elles sont électromagnétiques, sonores, lumineuses… et on les retrouve dans de très nombreux systèmes physiques. Le plus souvent, l'équation d'onde est celle exposée ci-dessous, dans laquelle est la fonction à trouver et , une constante déterminée expérimentalement. D'Alembert a été le premier à découvrir que l'équation d'une onde unidimensionnelle admettait comme solution toute fonction arbitraire qui admettra comme argument, décrivant une onde de forme arbitraire qui se déplace dans le temps vers la droite (vers les positifs). La solution générale, avec une onde unidimensionnelle, décrit en fait une combinaison linéaire de cette fonction avec une autre admettant comme argument, décrivant un déplacement vers la gauche (vers les négatifs). La solution générale est indiquée ci-dessous, sur la seconde ligne.
-
Les équations de Navier-Stokes : elles décrivent le mouvement des fluides newtoniens (gaz et liquides). Et comme les fluides sont partout, ces équations servent dans de nombreux secteurs de la recherche fondamentale comme appliquée. Elles servent, par exemple, à la prévision du temps, au profilage des ailes d'avions, aux comportements possibles des courants océaniques… Ces équations de Navier-Stokes sont des équations différentielles non linéaires partielles, souvent très difficiles à résoudre. En effet, les fluides sont affectés de turbulences (d'où la non-linéarité) dont on connait bien peu de choses, tant elles changent. Ces équations de Navier-Stokes sont comme une base, inachevée pour l'instant, pour tous ceux qui ont besoin de modéliser l'écoulement des fluides. Partant de là, la simulation numérique est fondée sur une stratégie de résolution approchée des équations de Navier-Stokes. L'approximation des résultats dépend en fait de la puissance de calcul des ordinateurs mis à la disposition des chercheurs : plus ils sont puissants, plus la réponse est proche de la réalité. Sans même rentrer dans le détail de la résolution proprement dite des équations non linéaires à dérivées partielles, certaines interrogations en apparence simples, comme l'existence ou l'unicité des solutions, sont d'une complexité effarante. La résolution rigoureuse des équations de Navier-Stokes, celles concernant les trois dimensions, font partie des sept problèmes, non résolus, du prix du millénaire de l'institut de mathématiques Clay… c'est dire ! L'équation de conservation dans le cas de l'écoulement incompressible du fluide se présente ainsi :
































Conseils
- De nombreuses équations différentielles ne peuvent pas être facilement résolues avec les seules méthodes évoquées dans cet article, en particulier les équations distinguées dans la discussion. Parmi celles qui sont difficiles à résoudre, citons les équations ayant des coefficients non constants (sauf l'équation d'Euler-Cauchy) ou les équations non linéaires (à quelques rares exceptions près). Les quelques méthodes évoquées ci-dessus suffisent largement pour résoudre la plupart des équations différentielles rencontrées aussi bien en mathématiques qu'en physique ou dans d'autres domaines plus spécifiques.
- S'il est toujours possible de dériver une fonction, l'intégrale de nombreuses expressions ne donne pas systématiquement des fonctions élémentaires. En conséquence, ne perdez pas de temps à intégrer une fonction qui ne peut l'être. En ce cas, allez vérifier sur des tableaux d'intégrales ou de primitives. La solution d'une équation différentielle qui peut être exprimée sous forme de fonctions élémentaires peut parfois être formulée sous forme intégrale, que l'intégration soit possible ou non.
Avertissements
- Ne vous fiez pas à l'apparence d'une équation différentielle ! Ou plutôt si, faites très attention à sa structure et à sa composition. Ne vous précipitez pas pour dire qu'il y a tant ou tant de solutions. Ci-dessous, vous avez deux équations différentielles d'ordre un qui apparaissent bien innocentes. La première peut, en effet, être facilement résolue par une des méthodes vues plus haut. Par contre, la résolution de la seconde équation qui, dans sa forme, semble bien proche de la première est d'une complexité redoutable. Cette mince différence, au lieu de , fait que la seconde équation n'est plus linéaire et là, les choses se compliquent.