Courbure
Intuitivement, courbe s'oppose à droit : la courbure d'un objet géométrique est une mesure quantitative du caractère « plus ou moins courbé » de cet objet. Par exemple :
- dans le plan euclidien, une ligne droite est un objet à une dimension de courbure nulle et un cercle un objet de courbure constante positive, valant 1/R (inverse du rayon) ;
- dans l'espace euclidien usuel à trois dimensions, un plan est un objet à deux dimensions de courbure nulle, et une sphère est un objet à deux dimensions de courbure constante positive. Une « selle de cheval » possède au contraire un point de courbure négative.
Cette notion intuitive de courbure se précise et admet une généralisation à des espaces de dimensions quelconques dans le cadre de la géométrie riemannienne.
Comme l'a montré Gauss pour le cas des surfaces (theorema egregium), il est très remarquable que la courbure d'un objet géométrique puisse être décrite de façon intrinsèque, c’est-à-dire sans référence aucune à un « espace de plongement » dans lequel se situerait l'objet considéré. Par exemple, le fait qu'une sphère ordinaire soit une surface à courbure positive constante est complètement indépendant du fait que nous voyons habituellement cette sphère comme étant plongée dans notre espace euclidien à trois dimensions. La courbure de cette sphère pourrait très bien être mesurée par des êtres intelligents bidimensionnels vivant sur la sphère (sortes de « fourmis bidimensionnelles »), à partir de mesures de longueurs et d'angles effectuées sur la sphère. La légende veut que Gauss se soit interrogé sur ces questions en étant confronté aux difficultés de cartographie de la Terre.
Courbure d'un arc

Courbure d'un arc plan en un point
On peut définir la courbure d'un arc du plan euclidien de plusieurs façons équivalentes. Il existe cependant deux conventions en usage, l'une faisant de la courbure une quantité obligatoirement positive, l'autre donnant une version algébrique de la courbure. Elle se calcule en chaque point de la courbe, moyennant certaines hypothèses sur les dérivées des fonctions servant à définir celle-ci.
La courbure quantité positive peut être vue comme la norme du vecteur accélération pour un mobile parcourant la courbe à vitesse constante égale à 1. C'est aussi l'inverse du rayon du cercle osculateur, cercle venant épouser la courbe au plus près au voisinage du point d'étude. C'est pour cela qu'on appelle rayon de courbure l'inverse de la courbure. En ce sens, la courbure indique la propension de la courbe à se comporter comme un cercle de plus ou moins grand rayon, c’est-à-dire à former un virage moins ou plus serré.
Pour introduire des versions algébrisées de la courbure, il faut munir le plan et la courbe d'une orientation et introduire un repère mobile (en) adapté au mouvement : le repère de Frenet. Le signe de la courbure s'interprète alors comme l'indication du sens dans lequel est tournée la concavité de la courbe. La courbure désigne aussi le taux (par unité d'abscisse curviligne) auquel les vecteurs du repère de Frenet tournent par rapport à une direction fixe. Aux points d'inflexion, la courbure change de signe.
Courbure d'un arc gauche
La courbure peut ensuite être généralisée aux courbes gauches (courbes tracées dans l'espace à trois dimensions). Il y a à nouveau un cercle osculateur qui est une très bonne approximation locale de la courbe. Ce cercle est inclus dans le plan osculateur et a pour rayon l'inverse de la courbure. Mais les mêmes raisons qui empêchent d'orienter de façon compatible tous les plans de l'espace empêchent de définir une courbure algébrique ; elle est donc par convention toujours positive. La courbure s'accompagne d'un autre invariant, la torsion qui indique la propension de l'arc à s'éloigner du plan osculateur.
Mesures globales
La courbure se mesure en chaque point. La sinuosité d'un arc, en revanche, décrit le repliement général de l'arc : c'est le rapport entre la longueur de l'arc et la distance entre ses extrémités. En termes imagés, elle compare la longueur de la trajectoire obtenue en suivant l'arc avec la distance à vol d'oiseau. On peut par exemple mesurer la sinuosité d'une figure formée par plusieurs arcs de cercle reliés avec des points d'inflexion, ce qui correspond à des alternances de courbures négatives et positives.
Courbure d'une surface de R3
Pour disposer de versions algébrisées de toutes les notions de courbure introduites, il convient de considérer une surface orientée. En chaque point de la surface, on définit les courbures principales et directions principales, notions géométriques intuitives obtenues à partir des courbes tracées sur la surface. Mais de façon plus profonde, ces objets peuvent être obtenus comme valeurs propres et vecteurs propres d'un endomorphisme du plan tangent, l'endomorphisme de Weingarten, qui permet de définir d'autres notions de courbure : courbure moyenne et courbure de Gauss.
Courbures principales en un point
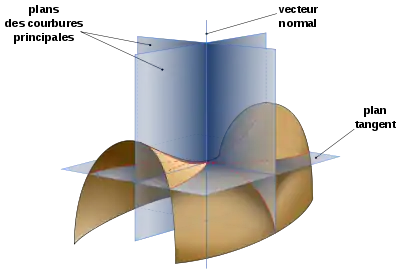
En un point M de la surface, on considère un plan tournant, perpendiculaire en M au plan tangent à la surface. Localement, ce plan intersecte la surface considérée en une courbe. À chacune des courbes ainsi construites est associée sa courbure en M.
Les valeurs minimum et maximum de la courbure portent le nom de courbures principales. En général, elles sont différentes et, dans ce cas, les plans correspondant aux deux courbures principales sont perpendiculaires entre eux. Leur intersection avec le plan tangent définit les directions principales. Sur l'illustration ci-contre, les courbures principales sont de signe opposé puisque l'une des courbes tourne sa concavité dans le sens du vecteur normal et l'autre en sens opposé.
Introduction des courbures en un point à partir de l'endomorphisme de Weingarten
L'application de Gauss associe à chaque point de la surface le vecteur normal orienté. En un point M de la surface, on peut considérer la différentielle de cette application, qui constitue un endomorphisme du plan tangent appelé endomorphisme de Weingarten. Intuitivement, cet endomorphisme indique les petites fluctuations du vecteur normal au voisinage du point M.
Il s'agit d'un endomorphisme symétrique, dont les courbures principales et directions principales sont les valeurs propres et vecteurs propres. Les directions principales sont donc bien orthogonales.
On appelle courbure moyenne la moyenne des courbures principales, soit .


Il s'agit de la demi-trace de l'endomorphisme de Weingarten.
On appelle courbure de Gauss le produit des courbures principales, soit .

Il s'agit du déterminant de l'endomorphisme de Weingarten. Toutefois le Theorema egregium de Gauss montre une différence de nature entre les courbures principales et la courbure moyenne d'une part, qui dépendent de la façon dont la surface est plongée dans l'espace ambiant R3 et la courbure de Gauss d'autre part qui reste invariante par toute isométrie locale (déformation respectant les longueurs). La courbure de Gauss a donc un aspect "intrinsèque" et c'est ce concept qui se généralise aux dimensions supérieures pour donner naissance à la notion de courbure d'une variété. C'est pour cela qu'elle est parfois simplement dénommée courbure.
Par ailleurs, certains auteurs[1] désignent la courbure de Gauss par courbure totale, appellation en conflit avec la désignation suivante.
Courbure totale de la surface
La courbure totale d'une surface orientée S de l'espace est l'intégrale de la courbure de Gauss sur la surface. Elle s'interprète également comme l'aire (algébrique) balayée par le vecteur normal unitaire sur la sphère unité. Sa valeur est donnée par la formule de Gauss-Bonnet : elle ne dépend que de la topologie de la surface.
Courbure d'une variété riemanienne
En géométrie riemannienne, la courbure est un tenseur introduit à partir de la notion de connexion. Cet objet s'est dégagé comme le plus pertinent, mais il peut être difficile à appréhender en raison du formalisme nécessaire à son introduction. La courbure sectionnelle d'une variété riemannienne, d'abord plus simple, véhicule autant d'information que le tenseur de courbure, et permet de faire le lien avec la courbure de Gauss.
Courbure sectionnelle
On définit une courbure sectionnelle pour chacun des 2-plans inclus dans chacun des espaces tangents d'une variété riemannienne. Si P est un tel plan en un point m, on considère en premier lieu la famille des géodésiques issues de m selon les vecteurs de P. Cette famille constitue une surface paramétrée incluse dans la variété, image du 2-plan par l'application exponentielle.
La courbure sectionnelle du 2-plan est alors la courbure de Gauss de cette surface. Formellement, la collection de toutes les courbures sectionnelles constitue une application sur la grassmannienne des 2-plans, à valeurs réelles.
Définition du tenseur de courbure
Soit une variété affine M de dimension , c'est-à-dire une variété munie d'une connexion affine . À partir de cette connexion, on définit le tenseur de courbure, ou tenseur de Riemann . Ce tenseur est défini pour X, Y et Z champs de vecteurs sur la variété par :



- ,

où [X, Y] est le crochet de Lie de X et Y. est un champ d'endomorphisme de l'espace fibré tangent TM : à tout champ de vecteur Z, il associe un nouveau champ de vecteur noté R(X, Y)Z.

Introduction d'une métrique
On munit la variété affine M d'un tenseur métrique g : est alors une variété riemannienne, et on peut définir une courbure à valeurs réelles par :

- .

En composantes dans une base locale , est le vecteur qui s'écrit :


- .

où les sont les composantes du tenseur de courbure. On a alors :

- .

En prenant sa trace (par rapport à X et Y), on obtient le tenseur de courbure de Ricci, et en prenant la trace de celui-ci, on obtient la courbure scalaire (qui est une fonction de M dans ).

Exemples
- Pour l'espace euclidien, la courbure scalaire est nulle.
- Pour la sphère de dimension de rayon 1, la courbure scalaire vaut .

Voir aussi
Article connexe
Liens externes
Pierre de la Harpe, « Espaces courbes », sur images.math.cnrs.fr, (consulté le ).
Johann Colombano, « Visualiser la courbure », sur images.math.cnrs.fr, (consulté le ).
Bibliographie
- Jean-Pierre Bourguignon, Espaces courbes [détail des éditions] Superbe introduction non technique au sujet.
- (en) Lee Carson Loveridge, Physical and Geometric Interpretations of the Riemann Tensor, Ricci Tensor, and Scalar Curvature « gr-qc/0401099 », texte en accès libre, sur arXiv. Remarquable article pédagogique écrit en 2004 (18 pages)
Aspects historiques
- Jean-Jacques Szczeciniarz, L’Invention de la courbure. Hermann, 2013.
- Luciano Boi, Le Problème mathématique de l'espace - Une quête de l'intelligible, Springer, 1995 (ISBN 978-3-54058922-8) Une histoire philosophique du concept mathématique d'espace, de la géométrie euclidienne au développement des géométries modernes non euclidiennes, dont la version riemannienne, indispensable pour la formulation de la relativité générale. Niveau premier cycle universitaire minimum.
- (en) Marvin Jay Greenberg, Euclidean and Non-Euclidean Geometries – Development and History, Freeman, 4e éd. 2007 (ISBN 978-0-71679948-1) Un livre de mathématiques qui retrace l'histoire et le développement des géométries non euclidiennes, essentiellement à deux dimensions (géométries de Gauss, Bolai et Lobachevsky). Accessible à l'« honnête homme » cultivé.
- (en) Max Jammer, Concepts of Space - The History of Theories of Space in Physics, Dover, 3e éd. 1993 (ISBN 978-0-48627119-4). Une histoire érudite du concept d'espace, depuis l'Antiquité jusqu'à nos jours. Niveau premier cycle universitaire.
Aspects techniques
- Boris Doubrovine (de), Anatoli Fomenko et Sergueï Novikov, Géométrie contemporaine - Méthodes et applications, [détail des éditions] – Première partie : géométrie des surfaces, des groupes de transformations et des champs (Part I: The Geometry of Surfaces, Transformation Groups, and Fields). Une introduction très pédagogique à la géométrie, avec des applications à la physique, écrite par des spécialistes russes. L'approche étant plutôt intuitive, cet ouvrage est accessible à partir du premier cycle universitaire pour un bon étudiant motivé.
- Marcel Berger et Bernard Gostiaux, Géométrie différentielle : variétés, courbes et surfaces [détail des éditions] Ouvrage issu d'un cours de magistère de mathématiques.
- (en) Michael Spivak, (A Comprehensive Introduction to) Differential Geometry [détail des éditions] Traité de référence en cinq volumes.
- (en) Marcel Berger, A Panoramic View of Riemannian Geometry, [détail de l’édition] Comme l'indique son titre, le grand géomètre français nous convie ici à une longue (824 pages) promenade panoramique dans le monde de la géométrie riemannienne. Les divers résultats sont pour la plupart donnés sans démonstrations détaillées, mais avec les références idoines pour le lecteur qui souhaiterait mettre « les mains dans le cambouis » . Le dernier chapitre donne les bases techniques du domaine.
- (en) Sylvestre Gallot, Dominique Hulin (en) et Jacques Lafontaine, Riemannian Geometry [détail de l’édition] Devenu une référence incontournable de la géométrie riemannienne.
Ouvrages de physique théorique
- (en) Theodore Frankel, The Geometry of Physics - An introduction, Cambridge University Press, 2004, 2e éd. révisée et illustrée (ISBN 978-0-52153927-2)
- (en) Mikio Nakahara, Geometry, Topology and Physics, Institute of Physics Publishing, 2003, 2e éd. illustrée (ISBN 978-0-75030606-5)
- (en) Charles Nash et Siddhartha Sen, Topology and Geometry for Physicists, Academic Press, 1983 (ISBN 978-0-12514080-5)
- (en) Yvonne Choquet-Bruhat et Cécile DeWitt-Morette, Analysis, Manifolds and Physics - Part I: Basics, North-Holland, 1989 (ISBN 978-0-44486017-0)
Notes et références
- J. Lelong-Ferrand, J.-M. Arnaudiès, Cours de mathématiques, t. 3, Géométrie et cinématique, 2e éd., Dunod Université, , p 509
 Portail de la géométrie
Portail de la géométrie  Portail de la physique
Portail de la physique