روبوتية
إن الروبوتية أو علم الروبوتات هو مجال التخصصات المتعددة المتداخلة والذي يدمج علوم الحاسوب والهندسة التطبيقة.[1] تتضمن الروبوتية تصميم وبناء وتشغيل واستخدام الروبوتات. إن الهدف من الروبوتية هو تصميم آلات يمكن أن تساعد البشر وتساندهم. تدمج الروبوتية مجالات الهندسة الميكانيكية والهندسة الكهربائية وهندسة المعلومات والميكاترونيك والإلكترونيات والهندسة الحيوية وهندسة الكمبيوتر وهندسة التحكم وهندسة البرمجيات وغيرها.

تطور الروبوتية آلات يمكن أن تحل محل البشر نظام الروبوت يعتمد على الجنان وتكرر الأعمال البشرية. يمكن استخدام الروبوتات في العديد من المواقف ولأغراض عديدة ولكن يتم استخدام العديد منها اليوم في البيئات الخطرة (بما في ذلك فحص المواد المشعة واكتشاف القنابل وإبطال مفعولها) وعمليات التصنيع أو حيث لا يستطيع البشر البقاء على قيد الحياة (على سبيل المثال في الفضاء وتحت الماء وفي أماكن مرتفعة الحرارة وتنظيف واحتواء المواد الخطرة والإشعاع). يمكن أن تتخذ الروبوتات أي شكل ولكن بعضها مصنوع ليشبه البشر في المظهر. يقال أن هذا يساعد في قبول الروبوت في بعض السلوكيات التكرارية التي عادة ما يؤديها الناس. تحاول هذه الروبوتات محاكاة المشي أو النهوض أو الكلام أو الإدراك أو أي نشاط بشري آخر. إن العديد من روبوتات اليوم مستوحاة من الطبيعة وتساهم في مجال الروبوتات المستوحاة من الكائنات الحية.
تتطلب بعض الروبوتات إدخالات من قبل المستخدم لتعمل بينما تعمل الروبوتات الأخرى بشكل مستقل. يعود مفهوم إنشاء روبوتات يمكنها العمل بشكل مستقل إلى العصور الكلاسيكية لكن البحث في الوظائف والاستخدامات المحتملة للروبوتات لم ينمو بشكل كبير حتى القرن العشرين. عبر التاريخ افترض العديد من العلماء والمخترعين والمهندسين والفنيين أن الروبوتات ستتمكن يومًا ما من محاكاة السلوك البشري وإدارة المهام بطريقة شبيهة بالبشر. إن الروبوتات اليوم هي مجال سريع النمو خاصة مع استمرار التقدم التكنولوجي. تخدم عمليات البحث والتصميم وبناء الروبوتات الجديدة أغراضًا عملية متنوعة سواء منزلياً أو تجاريًا أو عسكريًا. تم تصميم العديد من الروبوتات للقيام بوظائف خطرة على الناس مثل نزع فتيل القنابل والعثور على ناجين في أنقاض غير مستقرة واستكشاف الألغام وحطام السفن. تُستخدم الروبوتات أيضًا في العلوم والتكنولوجيا والهندسة والرياضيات (بالإنكليزية: STEM) كأداة مساعدة في التدريس.[2]
علم أصول الكلمات
تم اشتقاق كلمة روبوتية (بالإنجليزية: robotics) من كلمة روبوت (بالإنجليزية: robot) التي قدمها للجمهور الكاتب التشيكي كارل تشابيك في مسرحيته روبوتات روسوم العالمية (بالإنجليزية: R.U.R) التي نُشرت عام 1920.[3] تأتي كلمة روبوت من الكلمة السلافية روبوتا robota والتي تعني عبد / خادم. تبدأ المسرحية في مصنع يصنع أشخاصًا اصطناعيين يطلق عليهم اسم روبوتات وهي مخلوقات يمكن الخلط بينها وبين البشر - تشبه إلى حد بعيد الأفكار الحديثة لأجهزة أندرويد. إن كارل تشابيك نفسه لم يصوغ الكلمة. كتب رسالة قصيرة في إشارة إلى أصل الكلمة في قاموس أوكسفورد الإنجليزي حيث ذكر أن شقيقه جوزيف شابيك هو المنشئ الفعلي لهذه التسمية.[3]
وفقًا لقاموس أوكسفورد الإنجليزي ، استخدم إسحق عظيموف كلمة روبوتية (بالإنجليزية: robotics) لأول مرة في قصته القصيرة للخيال العلمي "الكذاب!" (بالإنجليزية: Liar) والتي نُشرت في مايو 1941 في مجلة الخيال العلمي التناظري والواقع. لم يكن عظيموف مدركًا أنه كان يصوغ المصطلح نظرًا لأن علم وتقنية الأجهزة الكهربائية هي عبارة عن إلكترونيات (بالإنجليزية: electronics) فقد افترض أن كلمة الروبوتية (بالإنجليزية: robotics) تشير بالفعل إلى علم وتقنية الروبوتات. في بعض أعمال عظيموف الأخرى ذكر أن أول استخدام لكلمة روبوتية كان في قصته القصيرة الركض حول (بالإنجليزية: Runaround) (المنشورة في مجلة الخيال العلمي التناظري والواقع عدد مارس عام 1942)[4][5] حيث قدم مفهومه للقوانين الثلاثة للروبوتات. ومع ذلك فإن المنشور الأصلي لقصته القصيرة للخيال العلمي "الكذاب!" يسبق نشر قصته القصيرة «الركض حول» بعشرة أشهر، لذلك يُشار إلى القصة الأولى عمومًا على أنها أصل الكلمة.
التاريخ
في عام 1948 صاغ نوربرت فينر مبادئ علم التحكم الآلي، وهو أساس الروبوتات العملية.
ظهرت الروبوتات المستقلة بالكامل فقط في النصف الثاني من القرن العشرين. تم تركيب أول روبوت يعمل رقميًا وقابل للبرمجة وهو يونيميت في عام 1961 من أجل استخدامه في رفع القطع المعدنية الساخنة من آلة صب القوالب وتكديسها. تنتشر الروبوتات التجارية والصناعية على نطاق واسع اليوم وتستخدم لأداء وظائف أرخص وأكثر دقة وموثوقية من البشر. يتم توظيفهم أيضًا في بعض الوظائف التي تكون قذرة جدًا أو خطيرة أو مملة بحيث لا تكون مناسبة للإنسان. تُستخدم الروبوتات على نطاق واسع في التصنيع والتجميع والتعبئة والتغليف والتعدين والنقل واستكشاف الأرض والفضاء والجراحة[6] والأسلحة والبحوث المختبرية والسلامة والإنتاج الضخم للسلع الاستهلاكية والصناعية.[7]
| التاريخ | الأهمية | اسم الروبوت | المخترع |
|---|---|---|---|
| القرن الثالث قبل الميلاد وما قبله | يظهر أحد أقدم أوصاف الأوتوماتا في نص لي تزي حيث يصف مواجهة حدثت في وقت سابق بين الملك مو حاكم تزو (1023-957 قبل الميلاد) ومهندس ميكانيكي يُعرف باسم يان شي المعروف باسم "الصانع". يُزعم أن الأخير قدم للملك شخصية على هيئة إنسان وبالحجم الطبيعي من نتاج عمله اليدوي الميكانيكي.[8] | يان شي ((بالصينية)) | |
| القرن الأول الميلادي وما قبله | أوصاف أكثر من 100 آلة وأوتوماتا بما في ذلك محرك إطفاء وعضو هوائي وآلة تعمل بقطع النقود المعدنية ومحرك يعمل بالبخار في مجلد الآلات الهوائية والآلات الذاتية الحركة (بالإنجليزية: Pneumatica and Automata) بواسطة هيرو الإسكندري | ستيسيبيوس وفيلو البيزنطي وهيرو الإسكندري وغيرهم | |
| حوالي 420 قبل الميلاد | طائر خشبي مدفوع بالبخار قادر على الطيران | الحمامة الطائرة | أرخيتاس التارانتومي |
| 1206 | يشكل الإنشاء الباكر لآلة شبيهة بالبشر والفرقة الآلية القابلة للبرمجة[9] | الفرقة الروبوتية
آلة غسل اليدين[10] الطاووس المتحرك الآلي[11] |
الجزري |
| 1495 | تصاميم لروبوت شبيه بالبشر | الفارس الآلي | ليوناردو دا فينشي |
| 1560 | راهب ميكانيكي له أقدام ميكانيكية مبنية تحت رداءه تقلدان حركة المشي. إن عيون وشفتا ورأس الروبوت تتحرك بحركات نابضة بالحياة. | الراهب الآلي[12] | ليوناردو دا فينشي |
| 1738 | البطة الميكانيكية التي كانت قادرة على الأكل ورفرفة جناحيها وطرح الفضلات. | البطة الهاضمة | جاك دي فوكانسون |
| 1898 | يوضح نيكولا تيسلا أول سفينة يتم التحكم فيها عن بُعد بواسطة الإشارات الراديوية. | سفينة تيلياوتوماتون
(بالإنجليزية: Teleautomaton) |
نيكولا تيسلا |
| 1921 | تظهر أول أناس آليين خياليين يدعون "الروبوتات" في مسرحية روبوتات روسوم العالمية (بالإنجليزية: R.U.R). | روبوتات روسوم العالمية | كارل تشابيك |
| 1930 | تم عرض روبوت شبيه بالبشر في معرضي العالم عامي 1939 و1940 | الكترو | شركة وستنجهاوس الكتريك |
| 1946 | أول جهاز كمبيوتر رقمي متعدد الأغراض | الزوبعة | أناس متعددون |
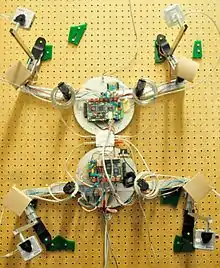
| 1948 | هما روبوتان بسيطان يظهران سلوكيات بيولوجية[13] | إلسي وإلمر | وليام جراي والتر |
| 1956 | أول روبوت تجاري من شركة يونيماتون (بالإنجليزية: Unimation) التي أسسها جورج ديفول وجوزيف إنجلبرجر بناءً على براءات اختراع ديفول.[14] | يونيمات | جورج ديفول |
| 1961 | أول روبوت صناعي تم تركيبه. | يونيمات | جورج ديفول |
| 1967 to 1972 | أول روبوت شبيه بالبشر ذكي كامل النطاق[15][16] وأول أندرويد. إن نظام التحكم في أطرافه سمح له بالسير باستخدام الأطراف السفلية وإمساك الأشياء ونقلها باليدين باستخدام أجهزة استشعار باللمس. إن نظام الرؤية الخاص به سمح له بقياس المسافات والاتجاهات للأشياء باستخدام المستقبلات الخارجية والعينين والأذنين الاصطناعية. وقد سمح له نظام المحادثة الخاص به بالتواصل مع شخص باللغة اليابانية باستخدام فم اصطناعي.[17][18][19] | وابوت - 1 | جامعة واسيدا |
| 1973 | أول روبوت صناعي بستة محاور مسيرة بالطاقة الكهروميكانيكية.[20][21] | فاميولوس | مجموعة روبوت كوكا |
| 1974 | لأول مرة في العالم تم تسليم أول روبوت صناعي كهربائي يتم التحكم فيه بواسطة الكمبيوتر الأصغري المسمى آي أر بي 6 (بالإنجليزية: IRB 6) المنتج من قبل شركة إيه اس إي إيه (بالإنجليزية: ASEA) إلى شركة هندسة ميكانيكية صغيرة في جنوب السويد. تم تسجيل براءة اختراع تصميم هذا الروبوت بالفعل عام 1972. | آي أر بي 6 | مجموعة روبوت إيه بي بي |
| 1975 | ذراع معالجة عالمي قابل للبرمجة، منتج يونيماشن (بالإنجليزية: Unimation) | بوما | فيكتور شاينمان |
| 1978 | أول لغة برمجة للروبوت على مستوى الكائن والتي تتيح للروبوتات التعامل مع الاختلافات في موضع وشكل الكائن وضوضاء المستشعر. | فريدي I وفريدي II ،
لغة برمجة الروبوت رابت (بالإنجليزية: RAPT) |
باتريشيا أمبلر وروبن بوبلستون |
| 1983 | أول لغة برمجة موازية متعددة المهام مستخدمة من أجل التحكم في الروبوت. كانت اللغة مدفوعة بالحدث (بالإنجليزية: Event Driven Language (EDL)) على كمبيوتر العملية آي بي إم/ السلاسل/ 1، مع تنفيذ كل من آليات الاتصال بين العمليات (WAIT / POST) والاستبعاد المتبادل (ENQ / DEQ) للتحكم في الروبوت.[22] | أدريال I (بالإنجليزية: ADRIEL I) | ستيفو بوزينوفسكي وميخائيل سيستاكوف |
الجوانب الروبوتية



هناك أنواع عديدة من الروبوتات والتي يتم استخدامها في العديد من البيئات المختلفة ولعدة استخدامات مختلفة. على الرغم من كونها شديدة التنوع في التطبيق والشكل إلا أنها تشترك جميعًا في ثلاثة جوانب تشابه أساسية عندما يتعلق الأمر ببنائها:
- جميع الروبوتات لديها نوع من البناء الميكانيكي أو إطار أو شكل أو شكل مصمم لتحقيق مهمة معينة. على سبيل المثال إن روبوت مصمم لاختراق الأوساخ الثقيلة أو الطين يمكن أن يستخدم مسارات كاتربيلر. إن الجانب الميكانيكي هو في الغالب الحل المبتكر لإكمال المهمة المعينة والتعامل مع فيزياء البيئة المحيطة بها. إن الشكل يتبع الوظيفة.
- تحتوي الروبوتات على مكونات كهربائية تعمل على تشغيل الماكينة والتحكم فيها. على سبيل المثال سيحتاج الروبوت الذي يحتوي على مسارات كاتربيلر إلى نوع من القوة لتحريك أدوات التعقب. تأتي هذه الطاقة في شكل كهرباء والتي يجب أن تنتقل عبر سلك وتنشأ من بطارية وهي دائرة كهربائية أساسية. حتى الآلات التي تعمل بالبنزين والتي تستمد طاقتها بشكل أساسي من البنزين لا تزال بحاجة إلى تيار كهربائي لبدء عملية الاحتراق وهذا هو السبب في أن معظم الآلات التي تعمل بالبنزين مثل السيارات تحتوي على بطاريات. يستخدم الجانب الكهربائي للروبوتات للحركة (من خلال المحركات) والاستشعار (حيث تُستخدم الإشارات الكهربائية لقياس أشياء مثل الحرارة والصوت والموضع وحالة الطاقة) والتشغيل (حيث تحتاج الروبوتات إلى مستوى معين من الطاقة الكهربائية التي يتم توفيرها لمحركاتها وأجهزة استشعارها ليتم تفعيل وتنفيذ العمليات الأساسية).
- تحتوي جميع الروبوتات على مستوى معين من كود برمجة الكمبيوتر. إن البرنامج هو كيف يقرر الروبوت متى وكيف يفعل شيئًا ما. في مثال مسار كاتربيلر قد يكون للروبوت الذي يحتاج إلى التحرك عبر طريق موحل البناء الميكانيكي الصحيح ويتلقى المقدار الصحيح من الطاقة من بطاريته لكنه لن يذهب إلى أي مكان دون أن يأمره البرنامج بالتحرك. إن البرامج هي الجوهر الأساسي للروبوت ويمكن أن يكون للروبوتات بنية ميكانيكية وكهربائية ممتازة ولكن إذا كان برنامجها سيئ البناء فسيكون أدائها سيئًا للغاية (أو قد لا يعمل على الإطلاق). هناك ثلاثة أنواع مختلفة من البرامج الروبوتية: التحكم عن بعد والذكاء الاصطناعي والهجين. يحتوي الروبوت المزود ببرمجة للتحكم عن بعد على مجموعة أوامر موجودة مسبقًا لن يؤديها إلا إذا استقبل إشارة من مصدر تحكم وعادة ما يكون ذلك المصدر هو إنسان يمتلك جهاز تحكم عن بعد. ربما يكون من الأنسب النظر إلى الأجهزة التي يتم التحكم فيها بشكل أساسي بواسطة أوامر بشرية على أنها تندرج في مجال الأتمتة بدلاً من الروبوتات. تتفاعل الروبوتات التي تستخدم الذكاء الاصطناعي مع بيئتها من تلقاء نفسها بدون مصدر تحكم ويمكنها تحديد ردود الفعل على الأشياء والمشكلات التي تواجهها باستخدام البرمجة الموجودة مسبقًا. إن البرامج الروبوتية الهجينة هي شكل من أشكال البرمجة التي تدمج وظائف الذكاء الاصطناعي والتحكم عن بعد معا ضمنها.
التطبيقات
نظرًا لأن المزيد والمزيد من الروبوتات يتم تصميمها لأداء مهام محددة فإن طريقة التصنيف هذه تصبح أكثر صلة. على سبيل المثال تم تصميم العديد من الروبوتات لأعمال التجميع والتي قد لا تكون قابلة للتكيف بسهولة مع التطبيقات الأخرى وبالتالي يطلق عليهم اسم «روبوتات التجميع». بالنسبة لعملية لحام التماس يوفر بعض الموردين أنظمة لحام كاملة مع الروبوت مثل معدات اللحام إلى جانب مرافق معالجة المواد الأخرى مثل الأقراص الدوارة وما إلى ذلك كوحدة متكاملة حيث يسمى هذا النظام الآلي المتكامل «روبوت اللحام» على الرغم من أن وحدة المنابلة المنفصلة يمكن تكييفها مع مجموعة متنوعة من المهام. تم تصميم بعض الروبوتات خصيصًا للتعامل مع الأحمال الثقيلة وتم تصنيفها على أنها «روبوتات الخدمة الشاقة».[23]
تشمل التطبيقات الحالية والمحتملة:
- الروبوتات العسكرية.
- الروبوتات الصناعية. تستخدم الروبوتات بشكل متزايد في التصنيع (منذ الستينيات). وفقًا لبيانات اتحاد الصناعات الروبوتية في الولايات المتحدة كانت صناعة السيارات في عام 2016 هي العميل الرئيسي للروبوتات الصناعية بنسبة 52٪ من إجمالي المبيعات.[24] في صناعة السيارات يمكن أن تصل الروبوتات إلى أكثر من نصف «العمالة». حتى أن هناك مصانع «مطفأة الأنوار» مثل مصنع تصنيع لوحة مفاتيح آي بي إم في تكساس والذي كان آليًا بالكامل في وقت مبكر من عام 2003.[25]
- الكوبوتات (بالإنجليزية: Cobots) (وهي الروبوتات التعاونية).[26]
- روبوتات البناء. يمكن تقسيم روبوتات البناء إلى ثلاثة أنواع: الروبوتات التقليدية والذراع الآلية والهيكل الخارجي الآلي.[27]
- الروبوتات الزراعية (بالإنجليزية: AgRobots).[28] يرتبط استخدام الروبوتات في الزراعة ارتباطًا وثيقًا بمفهوم الزراعة الدقيقة بمساعدة الذكاء الاصطناعي واستخدام الطائرات بدون طيار.[29] أثبتت أبحاث أجريت بين عام 1996وعام 1998 أيضًا أن الروبوتات يمكنها أداء مهمة الرعي.[30]
- الروبوتات الطبية بأنواعها المختلفة (مثل نظام دافنشي الجراحي وهوسبي).
- أتمتة المطبخ. الأمثلة التجارية لأتمتة المطبخ هي فليبي (البرغر) وزومي بيزا (البيتزا) وكافيه إكس (القهوة) وماكر شاكر (الكوكتيلات) وفروبوت (الزبادي المجمد) وسالي (السلطات).[31] الأمثلة المنزلية هي روتيماتيك (الخبز المسطح) [32] وبوريس (تحميل في غسالة الأطباق).[33]
- رياضة قتال الروبوت. وهي هواية أو حدث رياضي حيث يتقاتل روبوتان أو أكثر في ساحة لتعطيل بعضهما البعض. لقد تطور هذا الأمر من هواية في التسعينيات إلى العديد من المسلسلات التلفزيونية في جميع أنحاء العالم.
- تنظيف المناطق الملوثة مثل النفايات السامة أو المنشآت النووية.[34]
- الروبوتات المنزلية.
- الروبوتات النانوية.
- روبوتية السرب.[35]
- طائرات بدون طيار ذاتية القيادة.
- تعليم الخطوط في مجال الرياضة.
المكونات
مصدر الطاقة

في الوقت الحاضر يتم استخدام بطاريات (الرصاص الحمضية) كمصدر للطاقة. يمكن استخدام أنواع مختلفة من البطاريات كمصدر طاقة للروبوتات. وهي تتراوح بين بطاريات الرصاص الحمضية وهي آمنة ولها عمر افتراضي طويل نسبيًا ولكنها ثقيلة نوعًا ما مقارنة ببطاريات الفضة والكادميوم الأصغر حجمًا والتي تعد حاليًا أغلى بكثير. يحتاج تصميم روبوت يعمل بالبطارية إلى مراعاة عوامل مثل السلامة وعمر الدورة والوزن. يمكن أيضًا استخدام المولدات التي غالبًا ما تكون نوعًا من محركات الاحتراق الداخلي. ومع ذلك غالبًا ما تكون هذه التصميمات معقدة ميكانيكيًا وتحتاج إلى وقود وتتطلب تبديدًا للحرارة وتكون ثقيلة نسبيًا. سيؤدي الكابل الذي يربط الروبوت بمصدر طاقة إلى إزالة مصدر الطاقة من الروبوت بالكامل. هذا له ميزة توفير الوزن والمساحة عن طريق نقل جميع مكونات توليد الطاقة والتخزين إلى مكان آخر. ومع ذلك، فإن هذا التصميم يأتي مع عيب وجود كابل متصل بالروبوت باستمرار والذي قد يكون من الصعب التعامل معه.[36] أن مصادر الطاقة المحتملة يمكن أن تكون:
- هوائي (غازات مضغوطة)
- الطاقة الشمسية (باستخدام طاقة الشمس وتحويلها إلى طاقة كهربائية)
- المكونات الهيدروليكية (السوائل)
- تخزين طاقة دولاب الموازنة
- قمامة عضوية (عن طريق الهضم اللاهوائي)
- نووي
التَشغِيل

إن المشغلات هي «عضلات» الإنسان الآلي وهي الأجزاء التي تحول الطاقة الكامنة إلى حركة.[37] إن أكثر المشغلات شيوعًا هي المحركات الكهربائية التي تدور عجلة أو ترس والمحركات الخطية التي تتحكم في الروبوتات الصناعية في المصانع. هناك بعض التطورات الحديثة في أنواع بديلة من المشغلات التي تعمل بالكهرباء أو المواد الكيميائية أو الهواء المضغوط.
المحركات الكهربائية
إن الغالبية العظمى من الروبوتات تستخدم محركات كهربائية وهي غالبًا ما تكون محرّكات التيّار المستمرّ الفرجونيّة وغير الفرجونيّة (بالإنجليزية: brushed and brushless DC motors) في الروبوتات المحمولة أو محركات التيار المتردد في الروبوتات الصناعية وآلات التحكم الرقمي باستخدام الحاسوب (بالإنجليزية: computer numerical control (CNC)). غالبًا ما تكون هذه المحركات مفضلة في الأنظمة ذات الأعباء الأخف وحيث يكون الشكل السائد للحركة هو الدوران.
المشغلات الخطية
تتحرك أنواع مختلفة من المشغلات الخطية للداخل والخارج بدلاً من الدوران وغالبًا ما يكون لها تغيرات أسرع في الاتجاه خاصة عندما تكون هناك حاجة إلى قوى كبيرة جدًا مثل الروبوتات الصناعية. يتم تشغيلها عادةً عن طريق الهواء المضغوط والمؤكسد (مشغل هوائي) أو زيت (مشغل هيدروليكي) كما يمكن أيضًا تشغيل هذه المشغلات الخطية بالكهرباء التي تتكون عادةً من محرك ومسمار رئيسي. نوع آخر شائع هو المشغل الخطي الميكانيكي الذي يتم تشغيله يدويًا مثل الرف والترس على السيارة.
سلسلة المشغلات المرنة
يعتمد التشغيل المرن المتسلسل (بالإنجليزية: Series elastic actuation (SEA)) على فكرة إدخال مرونة مقصودة بين مشغل المحرك والحمل من أجل التحكم القوي في القوة. بسبب القصور الذاتي المنعكس المنخفض الناتج فإن التشغيل المرن المتسلسل يحسن السلامة عندما يتفاعل الروبوت مع البيئة (على سبيل المثال البشر أو قطعة العمل) أو أثناء الاصطدامات.[38] علاوة على ذلك فإنه يوفر أيضًا كفاءة في استخدام الطاقة وامتصاص الصدمات (الترشيح الميكانيكي) مع تقليل التآكل المفرط لناقل الحركة والمكونات الميكانيكية الأخرى. تم استخدام هذا النهج بنجاح في العديد من الروبوتات وخاصة روبوتات التصنيع المتقدمة [39] والروبوتات الشبيهة بالإنسان التي تسير.[40][41]
غالبًا ما يتم تنفيذ تصميم وحدة التحكم للمشغل المرن المتسلسل ضمن إطار العمل الخامل ديناميكيا وحراريا لأنه يضمن سلامة التفاعل مع البيئات غير المنظمة.[42] على الرغم من متانة الاستقرار الملحوظة إلا أن هذا الإطار يعاني من قيود صارمة مفروضة على وحدة التحكم والتي قد تؤدي إلى مقايضة على حساب الأداء. تتم إحالة القارئ إلى الاستقصاء التالي الذي يلخص معماريات وحدة التحكم العامة الخاصة بالتشغيل المرن المتسلسل جنبًا إلى جنب مع شروط الخمول الكافية المقابلة.[43] استخلصت إحدى الدراسات الحديثة شروط الخمول الضرورية والكافية لواحدة من أكثر معماريات التحكم في المعاوقة شيوعًا وهي بالإسم التشغيل المرن المتسلسل المزود بالسرعة السرعة (بالإنجليزية: velocity-sourced SEA).[44] هذا العمل له أهمية خاصة لأنه يقود حدود الخمول غير المتحفظة ولأول مرة في مخطط التقييم البيئي الاستراتيجي مما يسمح باختيار أكبر لمكاسب التحكم.
العضلات الهوائية
إن العضلات الاصطناعية الهوائية والمعروفة أيضًا باسم عضلات الهواء هي عبارة عن أنابيب خاصة تتمدد (عادةً تصل إلى 40٪) عندما يتم دفع الهواء داخلها. يتم استخدامها في بعض تطبيقات الروبوت.[45][46][47]
سلك العضلات
إن سلك العضلات والمعروف أيضًا باسم سبيكة ذات ذاكرة للشكل مثل سلك نيتينول (بالإنجليزية: Nitinol®) أو فليكسينول (بالإنجليزية: Flexinol®) هو مادة تتقلص (أقل من 5 ٪) عند استخدام الكهرباء. لقد تم استخدامها لبعض تطبيقات الروبوت الصغيرة.[48][49]
البوليمرات الكهربية
إن البوليمرات الكهربية (بالإنجليزية: EAPs أو EPAMs) عبارة عن مادة بلاستيكية يمكن أن تنكمش بشكل كبير عند التعرض للكهرباء (تصل إلى 380٪ من إجهاد التنشيط) وقد تم استخدامها في عضلات الوجه وأذرع الإنسان الآلي[50] ولتمكين الروبوتات الجديدة من الطفو[51] أوالطيران أو السباحة أو المشي.[52]
محركات بيزو
إن البدائل الحديثة لمحركات التيار المستمر هي محركات كهرضغطية أو محرك بموجات فوق صوتية. تعمل هذه العناصر وفقًا لمبدأ مختلف تمامًا حيث إن عناصر كهرباء انضغاطية صغيرة، والتي تهتز عدة آلاف من المرات في الثانية، تتسبب في حركة خطية أو دورانية. هناك آليات عمل مختلفة حيث يستخدم أحد الأنواع اهتزاز عناصر كهرضغطية لتوجيه المحرك في دائرة أو خط مستقيم.[53] هناك نوع آخر يستخدم العناصر الكهرضغطية لتسبب اهتزاز الجوزة أو لتقود برغي. إن مزايا هذه المحركات هي الدقة النانومترية والسرعة والقوة المتاحة مقارنة مع حجمها.[54] هذه المحركات متوفرة بالفعل تجاريًا ويتم استخدامها في بعض الروبوتات.[55][56]
الأنابيب النانوية المرنة
إن الأنابيب النانوية المرنة هي تقنية عضلات اصطناعية واعدة لكنها لا تزال في مرحلة مبكرة من التطوير التجريبي. يؤدي عدم وجود عيوب في الأنابيب النانوية الكربونية إلى تمكين هذه الخيوط من التشوه بشكل مرن بنسبة عدة درجات في المائة مع مستويات تخزين للطاقة ربما تصل إلى 10 جول / سم 3 للأنابيب النانوية المعدنية. يمكن استبدال العضلة ذات الرأسين البشرية بسلك قطره 8 مم من هذه المادة. مثل هذه «العضلات» المدمجة قد تسمح للروبوتات المستقبلية بالتغلب على البشر في الجري والقفز.[57]
الاستشعار
تسمح المستشعرات للروبوتات بتلقي معلومات حول قياس معين للبيئة أو المكونات الداخلية. يعد هذا الأمر ضروريًا للروبوتات لأداء مهامها والعمل على أي تغييرات في البيئة لحساب الاستجابة المناسبة. يتم استخدام هذه المستشعرات لإنجاز أشكال مختلفة من القياسات لإعطاء الروبوتات تحذيرات حول السلامة أو الأعطال ولتوفير معلومات في الوقت الفعلي للمهمة التي تؤديها هذه الروبوتات.
اللمس
تتلقى الأيدي الروبوتية والأيدي الصناعية الحالية معلومات لمسية أقل بكثير من اليد البشرية. طورت الأبحاث الحديثة مجموعة أجهزة استشعار تعمل باللمس تحاكي الخواص الميكانيكية ومستقبلات اللمس لأطراف الأصابع البشرية.[58][59] يتم إنشاء مجموعة المستشعرات كنواة صلبة محاطة بسائل موصل يحتوي على جلد مرن. يتم تثبيت الأقطاب الكهربائية على سطح النواة الصلبة ويتم توصيلها بجهاز قياس المعاوقة داخل النواة. عندما يلامس الجلد الاصطناعي شيئًا ما يتشوه مسار السائل حول الأقطاب الكهربائية مما ينتج عنه تغييرات في المعاوقة تحدد القوى المستلمة من الجسم. يتوقع الباحثون أن إحدى الوظائف المهمة لأطراف الأصابع الاصطناعية هذه هي ضبط القبضة الآلية على الأشياء الممسوكة.
طور علماء من عدة دول أوروبية وإسرائيل يدًا اصطناعية في عام 2009 تسمى اليد الذكية (بالإنجليزية: SmartHand) والتي تعمل مثل اليد الحقيقية - مما يسمح للمرضى بالكتابة بها والكتابة باستخدام لوحة المفاتيح ولعب البيانو وأداء حركات أخرى رائعة. يحتوي الطرف الاصطناعي على مستشعرات تمكن المريض من الشعور بشعور حقيقي في أطراف أصابعه.[60]
الرؤية
الرؤية الحاسوبية هي علم وتكنولوجيا الآلات التي ترى. كتخصص علمي تهتم رؤية الكمبيوتر بالنظرية الكامنة وراء الأنظمة الاصطناعية التي تستخرج المعلومات من الصور. يمكن أن تتخذ بيانات الصورة عدة أشكال مثل تسلسلات الفيديو والمشاهدات من الكاميرات.
في معظم تطبيقات رؤية الكمبيوتر العملية تكون أجهزة الكمبيوتر مبرمجة مسبقًا لحل مهمة معينة ولكن الأساليب القائمة على التعلم أصبحت الآن شائعة بشكل متزايد.
تعتمد أنظمة رؤية الكمبيوتر على مستشعرات الصور التي تكتشف الإشعاع الكهرومغناطيسي الذي يكون عادةً في شكل ضوء مرئي أو ضوء الأشعة تحت الحمراء. تم تصميم المستشعرات باستخدام فيزياء الحالة الصلبة. يتم شرح العملية التي ينتشر بها الضوء وينعكس عن الأسطح باستخدام البصريات. تتطلب مستشعرات الصور المتطورة حتى ميكانيكا الكم لتوفير فهم كامل لعملية تكوين الصورة. يمكن أيضًا تزويد الروبوتات بأجهزة استشعار متعددة للرؤية لتكون أكثر قدرة على حساب الإحساس بالعمق في البيئة. مثل عيون الإنسان، يجب أن تكون «عيون» الروبوتات أيضًا قادرة على التركيز على مجال معين من الاهتمام، وكذلك التكيف مع الاختلافات في شدة الضوء.
يوجد حقل فرعي ضمن رؤية الكمبيوتر حيث تم تصميم الأنظمة الاصطناعية لتقليد معالجة وسلوك النظام البيولوجي على مستويات مختلفة من التعقيد. أيضًا إن بعض الأساليب القائمة على التعلم التي تم تطويرها ضمن رؤية الكمبيوتر لها خلفيتها في علم الأحياء.
أشكال أخرى
تستخدم الأشكال الشائعة الأخرى للاستشعار في الروبوتات الليدار والرادار والسونار.[61] يقيس الليدار (بالإنجليزية: Lidar) المسافة إلى الهدف عن طريق إضاءة الهدف بضوء الليزر وقياس الضوء المنعكس بجهاز استشعار. يستخدم الرادار موجات الراديو لتحديد نطاق أو زاوية أو سرعة الأجسام. يستخدم السونار انتشارًا صوتيًا للتنقل أو الاتصال أو اكتشاف الأشياء الموجودة على سطح الماء أو تحته.
المنابلة


.jpg.webp)
قدم مات ماسون تعريفًا للمنابلة الآلية على النحو التالي: «تشير المنابلة إلى تحكم الوكيل في بيئته من خلال الاتصال الانتقائي».[62]
تحتاج الروبوتات إلى التعامل مع الأشياء أو التقاط أو تعديل أو تدمير أو أي تأثير آخر. وبالتالي يُشار إلى النهاية الوظيفية لذراع الروبوت التي تهدف إلى إحداث التأثير (سواء كانت يد أو أداة) على أنها مؤثرات نهائية[63] بينما يُشار إلى «الذراع» على أنها منابل(بالإنجليزية: manipulator).[64] تحتوي معظم أذرع الروبوت على مؤثرات نهائية قابلة للاستبدال كل منها يسمح لها بأداء مجموعة صغيرة من المهام. يحتوي البعض على منابل ثابت لا يمكن استبداله بينما يمتلك البعض منابلا واحدًا للأغراض العامة جدًا مثل اليد الشبيهة باليد البشرية على سبيل المثال.[65]
القابض الميكانيكي
من أكثر أنواع المؤثرات النهائية شيوعًا «القابضون». في أبسط مظاهره يتكون من إصبعين فقط يمكن فتحهما وإغلاقهما لالتقاط مجموعة من الأشياء الصغيرة وتركها. يمكن على سبيل المثال أن تصنع الأصابع من سلسلة يمر بها سلك معدني.[66] تشمل الأيدي التي تشبه اليد البشرية وتعمل مثل نظام يد الظل الآلية ويد الروبوت.[67] تشتمل الأيدي ذات المستوى المتوسط من التعقيد على يد دلفت (بالإنجليزية: Delft).[68][69] يمكن أن يأتي القابض الميكانيكي بأنواع مختلفة بما في ذلك قابض فكوك الاحتكاك وقابض الفكوك المحيطة. تستخدم فكوك الاحتكاك كل قوة القابض لتثبيت الكائن في مكانه باستخدام الاحتكاك في حين إن قابض الفكوك المحيطة تثبت الجسم الذي تقبض عليه في مكانه باستخدام احتكاك أقل.
مستجيبات نهاية الشفط
إن مستجيبات نهاية الشفط والتي يتم تزويدها بالطاقة بواسطة مولدات الضغط السلبي هي أجهزة قابضة بسيطة جدا [70] تستطيع حمل حمولات كبيرة جدا في حال كان سطح الإمساك ناعما بما فيه الكفاية لضمان الشفط.
إن روبوتات اللقط والوضع للمكونات الإلكترونية والأشياء الكبيرة مثل الزجاج الأمامي للسيارة غالبًا ما تستخدم مستجيبات نهاية ضغط سلبي بسيطة للغاية.
إن الشفط هو نوع مستخدم بشكل كبير من قبل المستجيبات النهائية في الصناعة ويرجع ذلك جزئيًا إلى أن المطاوعة الطبيعية لمستجيبات نهاية الشفط الناعم يمكن أن تتيح للروبوت أن يكون أكثر قوة في إطار الإدراك الآلي غير الكامل. كمثال: لنضع في الاعتبار حالة نظام رؤية روبوت يقدّر موضع زجاجة ماء لكن هذا الروبوت لديه خطأ في التقدير يبلغ سنتيمترًا واحدًا. في هذه الحالة قد يسبب هذا الأمر في ثقب القابض الميكانيكي الصلب لزجاجة الماء، لكن في المقابل فإن مستجيب نهاية الشفط الناعم قد ينحني للشفط قليلاً ويتوافق مع شكل سطح زجاجة الماء مانعا ثقبها.
المستجيبات المستخدمة للأغراض العامة
بدأت بعض الروبوتات المتقدمة في استخدام أيدي شبه بشرية بالكامل مثل نظام يد الظل الآلية ومانوس (بالإنجليزية: MANUS) و [71] و يد شنك (بالإنجليزية: Schunk Hand).[72] إن هذه الأيدي الآلية تمتلك مناورات بارعة للغاية مع ما يصل إلى 20 درجة من الحرية الميكانيكية وامتلاكها لمئات من أجهزة الاستشعار اللمسية.[73]
الروبوتات الدوارة

للتبسيط تحتوي معظم الروبوتات المتنقلة على أربع عجلات أو عدد من المسارات المستمرة. حاول بعض الباحثين إنشاء روبوتات ذات عجلات أكثر تعقيدًا بعجلة واحدة أو عجلتين فقط. يمكن أن يكون لهذه الميزات مزايا معينة مثل زيادة الكفاءة وتقليل الأجزاء، فضلاً عن السماح للإنسان الآلي بالتنقل في الأماكن الضيقة التي لن يتمكن الروبوت رباعي العجلات من القيام بها.
الروبوتات المُوَازِنة ذات العجلتين
تستخدم الروبوتات المُوَازِنة عمومًا المدوار (الجيروسكوب) لاكتشاف مقدار سقوط الروبوت ثم قيادة العجلات بشكل متناسب في نفس الاتجاه لموازنة السقوط وذلك بعملية تتكرر مئات المرات في الثانية بناءً على ديناميكيات الرقاص المعكوس.[74] تم تصميم العديد من روبوتات المُوَازِنة المختلفة.[75] على الرغم من أن سيجواي لا يُنظر إليه عمومًا على أنه روبوت إلا أنه يمكن اعتباره أحد مكونات الروبوت عند استخدامه على هذا النحو حيث يشير سيجواي إلى منصة التنقل الروبوتية (بالإنجليزية: Robotic Mobility Platform (RMP)). إن مثال هذا الاستخدام كان روبونوت وكالة الفضاء الأمريكية ناسا التي تم تحميلها على سيجواي.[76]
روبوتات المُوَازِنة ذات العجلة الواحدة
إن روبوت المُوَازِنة ذو العجلة الواحدة هو امتداد لروبوت المُوَازِنة ذو العجلتين بحيث يمكنه التحرك في أي اتجاه ثنائي الأبعاد باستخدام كرة مستديرة كعجلته الوحيدة. تم مؤخرا تصميم عدة روبوتات مُوَازِنة ذات عجلات واحدة مثل روبوت بالبوت الخاص بجامعة كارنيجي ميلون والذي يمتلك الطول والعرض التقريبي لشخص عادي وكذلك روبوت بول آي بي (بالإنجليزية: BallIP) الخاص بجامعة توهوكو غاكوين.[77] نظرًا لشكلها الطويل الرفيع والقدرة على المناورة في الأماكن الضيقة فإن روبوتات المُوَازِنة ذات العجلة الواحدة لديها القدرة على العمل بشكل أفضل من الروبوتات الأخرى في البيئات التي يوجد بها أشخاص.[78]
الروبوتات الكروية
تم إجراء العديد من المحاولات في الروبوتات الموجودة بالكامل داخل كرة كروية، إما عن طريق تدوير وزن داخل الكرة،[79][80] أو عن طريق تدوير الأصداف الخارجية للكرة.[81][82] وقد تمت الإشارة إلى هذه أيضًا باسم [[:en:Orb swarm|روبوت الجسم المستدير (بالإنجليزية: orb bot)]] [83] أو الروبوت الكروي (بالإنجليزية: ball bot).[84][85]
روبوتات بست عجلات
يمكن أن يؤدي استخدام ست عجلات بدلاً من أربع عجلات إلى منح قوة جر أو تماسك أفضل في التضاريس الخارجية مثل الأوساخ الصخرية أو العشب.
الروبوتات المتعقبة

توفر متعقبات الدبابات قوة جر أكبر من الروبوتات ذات الست عجلات. إن العجلات المتعقبة تتصرف كما لو أنها كانت مصنوعة من مئات العجلات لذلك فهي شائعة جدًا للروبوتات خارجية الاستخدام والروبوتات العسكرية حيث يجب أن يتحرك الروبوت على أرض وعرة للغاية. ومع ذلك يصعب استخدام الروبوتات المتعقبة في الأماكن الداخلية كما هو الحال مثلا على السجاد والأرضيات الملساء. من الأمثلة على الروبوتات المتعقبة الروبوت الحضري أوربي (بالإنجليزية: Urbie) التابع لوكالة الفضاء الأمريكية ناسا.[86]
المشي المطبق على الروبوتات
إن المشي مشكلة صعبة الحل ديناميكيا. لقد تم صنع العديد من الروبوتات التي يمكنها المشي بشكل موثوق على قدمين ومع ذلك لم يتم تصنيع أي منها حتى الآن بشكل تكون فيه قوية مثل الإنسان. كان هناك الكثير من الدراسات حول المشي المستوحى من الإنسان مثل مختبر أمبير (بالإنجليزية: AMBER) الذي تم إنشاؤه في عام 2008 من قبل قسم الهندسة الميكانيكية في جامعة تكساس إيه آند إم.[87] تم بناء العديد من الروبوتات الأخرى التي تمشي على أكثر من قدمين نظرًا لأن بناء هذه الروبوتات أسهل بكثير.[88][89] يمكن استخدام روبوتات المشي في التضاريس غير المستوية مما يوفر تنقلًا أفضل وكفاءة في استخدام الطاقة مقارنة بأساليب الحركة الأخرى. عادة يمكن للإنسان الآلي المشي جيدًا على قدمين على أرضيات مستوية ويمكنه أحيانًا صعود الدرج لكن لا يستطيع هذا الإنسان الآلي المشي فوق التضاريس الصخرية غير المستوية. بعض الطرق التي تم تجربتها هي:
تقنية نقطة اللحظة الصفرية
إن نقطة اللحظة الصفرية (بالإنجليزية: zero moment point (ZMP)) هي الخوارزمية المستخدمة من قبل الروبوتات مثل روبوت أسيمو (بالإنجليزية: ASIMO) من هوندا. يحاول الكمبيوتر الموجود على متن الروبوت الحفاظ على إجمالي قوى القصور الذاتي (مزيج من جاذبية الأرض وتسارع وتباطؤ المشي)، في مقابل قوة رد الفعل الأرضية (قوة الأرض التي تدفع قدم الروبوت للخلف). بهذه الطريقة تلغي القوتان ولا تترك أي لحظة (القوة التي تجعل الروبوت يدور ويسقط).[90] ومع ذلك فهذه ليست بالضبط الطريقة التي يمشي بها الإنسان والفرق واضح للمراقبين البشريين الذين أشار بعضهم إلى أن أسيمو يمشي كما لو كان بحاجة إلى مرحاض.[91][92][93] إن خوارزمية المشي الخاصة بأسيمو ليست ثابتة ويتم استخدام بعض الموازنة الديناميكية (انظر أدناه). ومع ذلك لا يزال يتطلب هذا الروبوت سطحًا أملسًا للمشي عليه.
القفز
نجحت العديد من الروبوتات التي تم بناؤها في الثمانينيات من قبل مارك رايبرت في مختبر الساق بمعهد ماساتشوستس للتكنولوجيا في إظهار مشي ديناميكي للغاية. في البداية يمكن للإنسان الآلي بساق واحدة وقدم صغيرة جدًا أن يظل مستقيماً بمجرد القفز. إن الحركة هي نفسها التي يتحرك بها شخص على عصا البوجو . عندما يسقط الروبوت على أحد الجانبين، فإنه يقفز قليلاً في هذا الاتجاه، لكي يمسك نفسه.[94] سرعان ما تم تعميم الخوارزمية على قدمين وأربع أرجل. تم عرض روبوت ذو قدمين وهو يعمل وحتى يقوم بشقلبات.[95] تم عرض روبوت رباعي الأرجل أيضًا يمكنه القيام بهرولة الخبب والجري والمشي بخطوات والمشي المقيد.[96] للحصول على قائمة كاملة بهذه الروبوتات راجع صفحة " MIT Leg Lab Robots".[97]
التوازن الديناميكي (السقوط المتحكم فيه)
هناك طريقة أكثر تقدمًا للروبوت تمكنه من المشي وهي استخدام خوارزمية موازنة ديناميكية والتي من المحتمل أن تكون أكثر قوة من تقنية نقطة اللحظة الصفرية حيث تراقب باستمرار حركة الروبوت وتضع القدمين من أجل الحفاظ على الاستقرار.[98] تم توضيح هذه التقنية مؤخرًا بواسطة الروبوت ديكسترالخاص بشركة أني بوت (بالإنجليزية: Anybots) [99] وهو مستقر جدًا حتى أنه يمكنه القفز.[100] مثال آخر هو روبوت تي يو ديلفت فلايم (بالإنجليزية: TU Delft Flame).
ديناميات سلبية
ربما تستخدم الطريقة الواعدة ديناميكيات سلبية حيث يتم استخدام زخم تأرجح الأطراف لتحقيق كفاءة أكبر. لقد ثبت أن الآليات البشرية غير المزودة بالطاقة يمكنها السير على منحدر لطيف باستخدام الجاذبية فقط لدفع نفسها. باستخدام هذه التقنية يحتاج الروبوت فقط إلى قدر صغير من قوة المحرك للمشي على طول سطح مستو أو أكثر قليلاً للسير صعودا إلى أعلى التل. إن هذه التقنية تقدم وعدا بجعل روبوتات المشي أكثر كفاءة بعشر مرات على الأقل من الروبوتات التي تستخدم تقنية نقطة اللحظة الصفرية مثل الروبوت أسيمو.[101][102]
الروبوتات الطائرة
إن طائرة الركاب الحديثة هي في الأساس روبوت طائر مع وجود شخصين لإدارتها. يمكن للطيار الآلي التحكم في الطائرة لكل مرحلة من مراحل الرحلة بما في ذلك الإقلاع والطيران العادي وحتى الهبوط.[103] هناك الروبوتات الطائرة الأخرى غير مأهولة بالسكان والتي تُعرف باسم الطائرة بدون طيار (بالإنجليزية: unmanned aerial vehicles (UAVs)). إن الطائرات يمكن أن تكون أصغر وأخف وزنًا بدون وجود طيار بشري على متنها ويمكنها أن تطير إلى منطقة خطرة لتنفيذ مهام المراقبة العسكرية. يمكن لبعض هذه الطائرات بدون طيار إطلاق النار على أهداف تحت القيادة. يتم أيضًا تطوير الطائرات بدون طيار التي يمكنها إطلاق النار على الأهداف تلقائيًا دون الحاجة إلى أمر من الإنسان. تشمل الروبوتات الطائرة الأخرى صواريخ كروز الجوالة وإنتوموبتر وروبوت طائرة الهليكوبتر الصغيرة من إبسون. تمتلك الروبوتات مثل حمامة الهواء وشعاع الهواء وهلام الهواء أجسامًا أخف من الهواء حيث يتم دفع هذه الروبوتات بواسطة الدواسات وتوجيهها بواسطة السونار.
الروبوتات الثعبانية الشكل

تم تطوير العديد من روبوتات الثعابين بنجاح. إن هذه الروبوتات الثعبانية تستطيع تقليد الطريقة التي تتحرك بها الثعابين الحقيقية حيث يمكن لهذه الروبوتات التنقل في أماكن ضيقة للغاية مما يعني أنه قد يتم استخدامها يومًا ما للبحث عن الأشخاص المحاصرين في المباني المنهارة.[104] يمكن لروبوت الثعبان الياباني إيه سي إم - أر خمسة (بالإنجليزية: ACM-R5) [105] التنقل على اليابسة وفي الماء.[106]
الروبوتات المتزلجة
تم تطوير عدد قليل من روبوتات التزلج أحدها عبارة عن جهاز متعدد الأوضاع للمشي والتزلج. يمتلك هذا الروبوت أربعة أرجل مع عجلات غير مزودة بمحركات والتي يمكن أن تتحرك أو تتدحرج.[107] يمكن لروبوت آخر هو بلين (بالإنجليزية: Plen) استخدام لوح تزلج مصغر أو حذاء تزلج والقيام بالتزلج عبر سطح المكتب.[108]
الروبوتات المتسلقة
تم استخدام عدة أساليب مختلفة لتطوير الروبوتات التي لديها القدرة على تسلق الأسطح الشاقولية. إن الأسلوب الأول المستخدم هو تقليد ومحاكاة حركات المتسلق البشري على جدار يحتوي على نتوءات؛ حيث يعمل الروبوت على تعديل مركز الكتلة الخاص به وتحريك كل طرف بدوره لكسب قوة الرفع المطلوبة للتسلق. مثال على ذلك هو الروبوت كابوتشين (بالإنجليزية: Capuchin)[109] الذي قام بتصنيعه الدكتور روكسيانغ تزانغ في جامعة ستانفورد في كاليفورنيا. إن الطريقة الثانية تستخدم طريقة حيوان أبو بريص في تسلقه للجدران الشاقولية حيث نجد أن وسادات أصابع الأقدام لديه متحورة ومتخصصة لتمكنه من تسلق الجدران والتي يمكن أن تعمل على الأسطح الملساء مثل الزجاج الشاقولي. إن الأمثلة على هذا الأسلوب تتضمن الروبوت وولبوت (بالإنجليزية: Wallbot)[110] والروبوت ستيكيبوت (بالإنجليزية: Stickybot).[111]
ذكرت صحيفة « تشاينا تكنولوجي ديلي» في 15 نوفمبر عام 2008 أن الدكتور لي هيو يونغ ومجموعته البحثية لشركة نيو كونسبت إيركرافت (تشوهاى) المحدودة قد طوروا بنجاح روبوت أبو بريص إلكتروني يدعى «سبيدي فريلاندر». وفقًا للدكتور يونغ يمكن لروبوت أبو بريص التسلق سريعًا لأعلى ولأسفل مجموعة متنوعة من جدران المباني والتنقل عبر الشقوق الأرضية والجدارية والمشي مقلوبًا على السقف. كما إن بنجاح روبوت أبو بريص الإلكتروني كان قادرًا على التكيف مع أسطح الزجاج الأملس والجدران الخشنة واللزجة والمغبرة بالإضافة إلى أنواع مختلفة من المواد المعدنية. إن روبوت أبو بريص الإلكتروني يمكنه أيضًا تحديد العقبات والالتفاف عليها تلقائيًا بنجاح. كانت مرونة وسرعة روبوت أبو بريص الإلكتروني مماثلة لتلك الخاصة بحيوان أبو بريص الطبيعي. إن الطريقة الثالثة هي محاكاة وتقليد حركة ثعبان يتسلق عمودًا.[61]
الروبوتات السابحة (السمكية)

تم حساب أنه عند الحركة المائية المتمثلة بالسباحة يمكن لبعض الأسماك أن تحقق كفاءة دفع بحري تتجاوز 90٪.[112] علاوة على ذلك يمكن لهذه الأسماك تحقق تتسارعا في حركتها وتناور بشكل أفضل بكثير من أي قارب أو غواصة تم صنعها من قبل الإنسان حتى الآن، وإن هذه الأسماك تنتج ضوضاء أقل واضطراب مياه أقل لذلك يرغب العديد من الباحثين الذين يدرسون الروبوتات المتخصصة للعمل تحت الماء في نسخ هذا النوع من الحركة.[113] ومن الأمثلة البارزة السمكة الروبوتية جي 9 (بالإنجليزية: Robotic Fish G9) التي تم تطويرها من قبل قسم علوم الكمبيوتر في جامعة إسيكس.[114] مثال آخر هو سمكة التونة الروبوتية التي بناها معهد الروبوتات الميدانية لتحليل حركة الأسماك ونمذجتها رياضيًا.[115] إن روبوت البطريق المائي (بالإنجليزية: Aqua Penguin) [116] الذي صممه وصنعه فيستو الألماني هو شكل مبسط يحاكي طريقة الدفع بواسطة «الزعانف» الأمامية لطيور البطريق. لقد قام فيستو أيضًا ببناء روبوت الحبار المائي (بالإنجليزية: Aqua Ray) وروبوت قنديل البحر المائي (بالإنجليزية: Aqua Jelly) اللذين يحاكيان حركة حبار مانتا وقنديل البحر على التوالي.
في عام 2014 تم تطوير روبوت آي سبلاش - اثنان (بالإنجليزية: iSplash -II) من قبل طالب الدكتوراه ريتشارد جيمس كلافام والبروفيسور هوشينغ هيو في جامعة إسيكس. إن روبوت آي سبلاش اثنان كان أول سمكة روبوتية قادرة على التفوق في الأداء على الأسماك الكارنجية الشكل الحقيقية (بالإنجليزية: carangiform fish) من حيث متوسط السرعة القصوى (تقاس بأطوال الجسم / ثانية) والتحمل وهي المدة التي يتم فيها الحفاظ على السرعة القصوى.[117] لقد حققت هذه السمكة الروبوتية سرعات سباحة وصلت إلى 11.6 مرة طول جسمها / الثانية (وهذه يعني 3.7 متر / ثانية).[118] كان الروبوت السمكي آي سبلاش - واحد (بالإنجليزية: iSplash -I) الذي تم الكشف عنه في عام 2014 هو أول منصة روبوتية تطبق حركة سباحة كارنجية الشكل باستخدام كامل طول الجسم (بالإنجليزية: full-body length carangiform swimming motion) والتي وُجد أنها تزيد سرعة السباحة بنسبة 27٪ مقارنة مع النهج التقليدي للحركة موجية الشكل المقيدة خلفيا.[119]
الروبوتات المبحرة باستخدام الأشرعة

لقد تم تطوير روبوتات المراكب الشراعية من أجل إجراء قياسات على سطح المحيط. إن روبوت المراكب الشراعية النموذجي هو فايموس (بالإنجليزية: Vaimos) [120] الذي تم بناؤه من قبل إفريمير (بالإنجليزية: IFREMER) وانستا - بريتاني (بالإنجليزية: ENSTA-Bretagne). نظرًا لأن قوة الدفع البحري لروبوتات المراكب الشراعية تستخدم طاقة الريح فإن طاقة البطاريات تستخدم فقط للكمبيوتر وللاتصالات وللمشغلات (لضبط الدفة والشراع). إذا كان الروبوت مزودًا بألواح شمسية يمكن حينها للروبوت نظريًا التنقل إلى الأبد. إن المسابقتان الرئيسيتان لروبوتات المراكب الشراعية هما بطولة العالم للإبحار الآلي (بالإنجليزية: WRSC) والتي تقام كل عام في أوروبا و بطولة الروبوت المبحر بالأشرعة (بالإنجليزية: Sailbot).
التفاعل والملاحة البيئية

على الرغم من أن نسبة كبيرة من الروبوتات قيد التشغيل اليوم إما يتحكم فيها الإنسان أو تعمل في بيئة ثابتة إلا أن هناك اهتمامًا متزايدًا بالروبوتات التي يمكنها العمل بشكل مستقل في بيئة ديناميكية. تتطلب هذه الروبوتات مزيجًا من أجهزة وبرامج الملاحة لاجتياز بيئتها. على وجه الخصوص يمكن للأحداث غير المتوقعة (مثل الأشخاص والعوائق الأخرى غير الثابتة) أن تسبب مشاكل أو تصادمات. إن بعض الروبوتات المتقدمة للغاية مثل روبوت أسيمو وروبوت مينو تمتلك بشكل خاص أجهزة وبرامج ملاحة جيدة. كما أن السيارات ذاتية التحكم والمركبة الذكية بدون سائق من تصميم ارنست ديكمان والمدخلات في سباق التحدي الكبير داربا قادرة على استشعار البيئة جيدًا واتخاذ قرارات ملاحية بناءً على هذه المعلومات الواردة إليها عن طريق سرب من الروبوتات المستقلة.[35] تستخدم معظم هذه الروبوتات جهاز ملاحة باستخدام نظام التموضع العالمي GPS مع نقاط مسار جنبًا إلى جنب مع الرادار حيث يتم دمجها أحيانًا مع بيانات حسية أخرى مثل الليدار (نظام قياس المسافات باستخدام الليزر) وكاميرات الفيديو وأنظمة التوجيه بالقصور الذاتي لتحسين التنقل بين نقاط الطريق.
التفاعل بين الإنسان والروبوت

يجب أن تتقدم أحدث التقنيات في الذكاء الحسي للروبوتات من خلال عدة أوامر من حيث الحجم إذا أردنا أن تتجاوز الروبوتات التي تعمل في منازلنا مجرد تنظيف الأرضيات بالمكنسة الكهربائية. إذا كان للروبوتات أن تعمل بشكل فعال في المنازل والبيئات غير الصناعية الأخرى فإن الطريقة التي يتم توجيهها لأداء وظائفها وخاصة كيفية إخبارها بالتوقف ستكون ذات أهمية حاسمة. قد يكون لدى الأشخاص الذين يتفاعلون مع هذه الروبوتات تدريبًا ضئيلًا أو معدومًا في مجال الروبوتات وبالتالي يجب أن تكون أي واجهة لهذه الروبوتات بديهية للغاية. يفترض مؤلفو الخيال العلمي أيضًا أن الروبوتات ستكون في النهاية قادرة على التواصل مع البشر من خلال الكلام والإيماءات وتعبيرات الوجه بدلاً من واجهة سطر الأوامر. على الرغم من أن الكلام سيكون الطريقة الأكثر طبيعية لتواصل الإنسان إلا أنه غير طبيعي بالنسبة للروبوت. من المحتمل أن يمر وقت طويل قبل أن تتفاعل الروبوتات بشكل طبيعي مثل روبوتات الخيال العلمي كما هو حال روبوت سي ثري بي أو (بالإنجليزية: C-3PO) أو روبوت البيانات (بالإنجليزية: Data) في مسلسل ستار تريك، الجيل القادم (بالإنجليزية: Star Trek) الخياليين.
التعرف على الكلام
يعد تفسير التدفق المستمر للأصوات القادمة من الإنسان في الوقت الفعلي مهمة صعبة لجهاز الكمبيوتر ويرجع ذلك في الغالب إلى التباين الكبير في الكلام.[121] قد تبدو الكلمة نفسها التي يتحدث بها نفس الشخص مختلفة اعتمادًا على الصوتيات المحلية ومستوى جهارة الصوت والكلمة السابقة وما إذا كان المتحدث يعاني من نزلة برد أم لا ... إلخ. يصبح الأمر أكثر صعوبة عندما يكون للمتحدث لهجة مختلفة.[122] ومع ذلك تم إحراز خطوات كبيرة في هذا المجال منذ أن صمم ديفيس وبيدولف وبالاشك أول «نظام إدخال صوتي» والذي تعرف على «عشرة أرقام يتحدث بها مستخدم واحد بدقة 100٪» في عام 1952.[123] حاليًا يمكن لأفضل الأنظمة التعرف على الكلام الطبيعي المستمر حتى عند سرعة كلام تصل إلى 160 كلمة في الدقيقة وبدقة تصل إلى 95٪.[124] بمساعدة الذكاء الاصطناعي يمكن للآلات في الوقت الحاضر استخدام أصوات الناس للتعرف على مشاعرهم مثل الرضا أو الغضب.[125]
صوت آلي
توجد عقبات أخرى عند السماح للروبوت باستخدام الصوت للتفاعل مع البشر. لأسباب اجتماعية يثبت الصوت الاصطناعي أنه دون المستوى الأمثل كوسيلة اتصال[126] مما يجعل من الضروري تطوير المكون العاطفي للصوت الآلي من خلال تقنيات مختلفة.[127][128] إن إحدى ميزات التفرع ثنائي الصوت (بالإنجليزية: diphonic) تتمثل في الشعور الذي تمت برمجة الروبوت لعرضه ويمكن تحميله على الشريط الصوتي أو الوحدة الصوتية (بالإنجليزية: phoneme) المبرمجة مسبقًا بالفعل على الوسائط الصوتية. أحد أقدم الأمثلة على ذلك هو روبوت تعليمي يُدعى ليتشيم (بالإنجليزية: Leachim) تم تطويره عام 1974 بواسطة مايكل ج فريمان.[129][130] تمكن ليتشيم من تحويل الذاكرة الرقمية إلى كلام شفهي بدائي على أقراص كمبيوتر مسجلة مسبقًا.[131] لقد تمت برمجة ليتشيم لتعليم الطلاب في ذا برونكس في مدينة نيويورك.[131]
إيماءات
يمكن للمرء أن يتخيل في المستقبل أن يشرح للطاهي الآلي كيفية صنع المعجنات أو يسأل عن الاتجاهات ضابط الشرطة الروبوتي. في كلتا الحالتين فإن عمل إيماءات اليد من شأنه أن يساعد في الأوصاف اللفظية. في الحالة الأولى يتعرف الروبوت على الإيماءات التي يقوم بها الإنسان وربما يكررها للتأكيد. في الحالة الثانية يمكن أن يقوم ضابط الشرطة الروبوتي باستخدام إيماءات اليد للإشارة «الذهاب إلى أسفل الطريق، ثم الانعطاف يمينًا». من المحتمل أن تشكل الإيماءات جزءًا من التفاعل بين البشر والروبوتات.[132] تم تطوير العديد من الأنظمة العظيمة للتعرف على إيماءات اليد البشرية.[133]
تعابير الوجه
يمكن أن توفر تعابير الوجه ردود فعل سريعة على تقدم الحوار بين شخصين وقريبًا قد تكون هناك إمكانية على فعل نفس الأمر بين الإنسان والروبوتات. تم إنشاء الوجوه الروبوتية بواسطة روبوتية ديفيد هانسون (بالإنجليزية: Hanson Robotics) باستخدام بوليمرها المرن المسمى فروبير (بالإنجليزية: Frubber) مما يسمح بالقيام بعدد كبير من تعابير الوجه بسبب مرونة طلاء الوجه المطاطي والمحركات الموجودة تحت السطح (الآليات المنظمة (بالإنجليزية: servos)).[134] تم بناء الطلاء والآليات المنظمة على جمجمة معدنية. يجب أن يعرف الروبوت كيفية الاقتراب من الإنسان من خلال التحكم في تعابير الوجه ولغة الجسد. سواء كان الشخص سعيدًا أو خائفًا أو مجنون المظهر فإن ذلك يؤثر على نوع التفاعل المتوقع من الروبوت. وبالمثل يمكن للروبوتات مثل لروبوت كيسمتوالإضافة الأحدث روبوت نكسي (بالإنجليزية: Nexi)[135] إنتاج مجموعة من تعابير الوجه مما يسمح لها بإجراء تفاعلات اجتماعية متبادلة هادفة مع البشر.[136]
المشاعر الاصطناعية
يمكن أيضًا إنشاء المشاعر الاصطناعية والتي تتكون من سلسلة من تعابير الوجه و / أو الإيماءات. كما يتضح من فيلم فاينل فانتسي: ذا سبيريتس ويذين، فإن برمجة هذه المشاعر الاصطناعية معقدة وتتطلب قدرًا كبيرًا من الملاحظة البشرية. لتبسيط هذه البرمجة في الفيلم، تم إنشاء إعدادات مسبقة مع برنامج خاص. أدى هذا إلى تقليل الوقت اللازم لتصوير الفيلم. يمكن نقل هذه الإعدادات المسبقة لاستخدامها في الروبوتات الواقعية.
الشخصية
إن العديد من روبوتات الخيال العلمي لها شخصية وهو أمر قد يكون أو لا يكون مرغوبًا به في الروبوتات التجارية في المستقبل.[137] ومع ذلك يحاول الباحثون إنشاء روبوتات تبدو وكأنها تتمتع بشخصية:[138][139] أي أنها تستخدم الأصوات وتعابير الوجه ولغة الجسد لمحاولة نقل حالة داخلية قد تكون فرحًا أو حزنًا أو خوفًا. أحد الأمثلة التجارية هو بليو وهو روبوت ديناصور يمكن أن يُظهر العديد من المشاعر الواضحة.[140]
الذكاء الاجتماعي
يبحث مختبر الآلات الذكية الاجتماعية التابع لمعهد جورجيا للتكنولوجيا عن مفاهيم جديدة لتفاعل التدريس الموجه مع الروبوتات. الهدف من المشاريع هو روبوت اجتماعي يتعلم المهام والأهداف من المظاهرات البشرية دون معرفة مسبقة بالمفاهيم عالية المستوى. تستند هذه المفاهيم الجديدة إلى بيانات مستشعر مستمر منخفض المستوى من خلال التعلم غير الخاضع للإشراف ويتم تعلم أهداف المهام لاحقًا باستخدام نهج بيسين (بالإنجليزية: Bayesian). يمكن استخدام هذه المفاهيم لنقل المعرفة إلى المهام المستقبلية، مما يؤدي إلى تعلم أسرع لتلك المهام. تم عرض النتائج من خلال الروبوت كوري (بالإنجليزية: Curi) الذي يمكنه غرف ونقل بعض المعكرونة من وعاء إلى طبق ومن ثم سكب الصلصة فوق المعكرونة.[141]
المراقبة


يجب التحكم في الهيكل الميكانيكي للروبوت لأداء المهام. يتضمن التحكم في الروبوت ثلاث مراحل متميزة: الإدراك والمعالجة والعمل (النماذج الروبوتية ). تعطي المستشعرات معلومات حول البيئة أو الروبوت نفسه (مثل موضع مفاصلها أو المستجيب النهائي لها). تتم معالجة هذه المعلومات بعد ذلك لتخزينها أو نقلها ولحساب الإشارات المناسبة للمشغلات (المحركات) التي تحرك الجسم الميكانيكي.
أن طور المعالجة يمكن أن يأخذ نطاقا واسعا فيما يتعلق من ناحية التعقيد. على المستوى التفاعلي قد يترجم معلومات المستشعر الخام مباشرة إلى أوامر المشغل. إن اندماج المستشعر يمكن أن يستخدم أولا لتقدير المعلمات ذات الأهمية (على سبيل المثال موضع قابض الروبوت) من بين بيانات المستشعر الصاخبة. من هذه التقديرات يمكن أن يتم استنتاج مهمة فورية (مثل تحريك القابض في اتجاه معين). إن تقنيات من نظرية التحكم وضبط الأنظمة الحركية سوف تحول هذه المهمة إلى أوامر تقود المشغلات.
في نطاقات زمنية أطول أو بمهام أكثر تعقيدًا قد يحتاج الروبوت إلى البناء والتفكير باستخدام نموذج «معرفي». تحاول النماذج المعرفية تمثيل الروبوت والعالم وكيفية تفاعلها. يمكن استخدام التعرف على الأنماط ورؤية الكمبيوتر لتتبع الأشياء. يمكن استخدام تقنيات رسم الخرائط لبناء خرائط للعالم. أخيرًا يمكن استخدام تخطيط الحركة وتقنيات الذكاء الاصطناعي الأخرى لمعرفة كيفية التصرف. على سبيل المثال قد يكتشف المخطط كيفية إنجاز مهمة ما دون الاصطدام بالعقبات والسقوط وما إلى ذلك.
مستويات الحكم الذاتي

قد تحتوي أنظمة التحكم أيضًا على مستويات مختلفة من الاستقلالية:
- التفاعل المباشر وهو يستخدم من أجل الأجهزة اللمسية أو الأجهزة التي يتم التحكم فيها عن بُعد ويتمتع الإنسان تقريبًا بتحكم كامل في حركة الروبوت.
- تعمل أوضاع مساعدة المشغل على توجيه المشغل لمهام متوسطة إلى عالية المستوى حيث يكتشف الروبوت تلقائيًا كيفية تحقيقها.[143]
- قد يمضي الروبوت المستقل في عمله بدون تدخل بشري لفترات طويلة من الزمن. لا تتطلب المستويات الأعلى من الاستقلالية بالضرورة قدرات معرفية أكثر تعقيدًا. على سبيل المثال الروبوتات في مصانع التجميع مستقلة تمامًا ولكنها تعمل في نمط ثابت.
يأخذ تصنيف آخر في الاعتبار التفاعل بين التحكم البشري وحركات الآلة:
- التشغيل عن بعد: يتحكم الإنسان في كل حركة ويتم تحديد كل تغيير في مشغل الآلة بواسطة المشغل.
- إشرافي: يحدد الإنسان التحركات العامة أو التغييرات في الموضع وتقرر الآلة حركات محددة لمشغلاتها.
- استقلالية على مستوى المهمة: يحدد المشغل المهمة فقط ويدير الروبوت نفسه لإكمالها.
- الحكم الذاتي الكامل: ستقوم الآلة بإنشاء وإكمال جميع مهامها دون تدخل بشري.
الابحاث
لا يركز الكثير من الأبحاث في مجال الروبوتية على مهام صناعية محددة بل يركز على التحقيقات في أنواع جديدة من الروبوتات والطرق البديلة حول كيفية التفكير في الروبوتات أو تصميمها والطرق الجديدة لتصنيعها. إن التحقيقات الأخرى مثل مشروع سايبر فلورا التابع لمعهد ماساتشوستس للتكنولوجيا تكاد تكون أكاديمية بالكامل.
إن أول ابتكار جديد في تصميم الروبوتات هو المصدر المفتوح (بالإنجليزية: open sourcing) لمشاريع الروبوت. لوصف مستوى تقدم الروبوت يمكن استخدام مصطلح «جيل الروبوتات». صاغ هذا المصطلح البروفيسور هانز مورافيك عالم الأبحاث الرئيسي في معهد الروبوتية فيجامعة كارنيجي ميلون في وصف التطور المستقبلي القريب لتكنولوجيا الروبوت. أن الجيل الأول من الروبوتات، الذي تنبأه مورافيك في عام 1997، يجب أن يكون لديه قدرة فكرية يمكن مقارنتها بسحلية وتنبأ بإنه سيكون من الواجب أن تصبح متاحة بحلول عام 2010. نظرًا لأن الجيل الأول من الروبوت سيكون غير قادر على التعلم فأن مورافيك يتوقع أن يكون الجيل الثاني من الروبوتات أفضل من الأول وسيصبح متاحًا بحلول عام 2020 مع إمكانية مقارنة ذكائه بذكاء الفأر. يجب أن يتمتع الجيل الثالث من الروبوتات بذكاء مماثل لذكاء القرد. على الرغم من أن روبوتات الجيل الرابع الروبوتات ذات الذكاء البشري، حسب توقع الأستاذ مورافيك أن تصبح ممكنة في الواقع، إلا أنه لا يتوقع حدوث ذلك قبل حوالي عام 2040 أو 2050.[144]
إن الابتكار الثاني في تصميم الروبوتات هو الروبوتات التطورية. هذه المنهجية تستخدم الحوسبة التطورية للمساعدة في تصميم الروبوتات وخاصة شكل الجسم أو المتحكمات في الحركة والسلوك. بطريقة مشابهة للتطور الطبيعي يُسمح لمجموعة ذات عدد كبير من الروبوتات بالمنافسة فيما بينها بطريقة ما أو يتم قياس قدرتها على أداء مهمة باستخدام وظيفة اللياقة. نتيجة لذلك تتم إزالة تلك الروبوتات ذات الأداء الأسوأ من بين مجموعة الروبوتات المتنافسة ومن ثم يتم استبدالها بمجموعة روبوتات جديدة تمتلك سلوكيات جديدة تعتمد على سلوكيات الروبوتات الفائزة. بمرور الوقت يتحسن عدد روبوتات المجموعة ويصل في النهاية إلى درجة قد يظهر فيها روبوت مرضٍ (بالإنجليزية: satisfactory robot). يحدث هذا دون أي برمجة مباشرة للروبوتات من قبل الباحثين. يستخدم الباحثون هذه الطريقة لإنشاء روبوتات أفضل[145] واستكشاف طبيعة التطور.[146] نظرًا لأن العملية تتطلب غالبًا محاكاة أجيال عديدة من الروبوتات[147] يمكن تشغيل هذه التقنية بالكامل أو في الغالب في محاكاة باستخدام حزمة برامج محاكاة الروبوت ومن ثم اختبارها على روبوتات حقيقية بمجرد أن تصبح الخوارزميات المتطورة جيدة بما فيه الكفاية.[148] يوجد حاليًا حوالي 10 ملايين روبوت صناعي يكدحون في جميع أنحاء العالم واليابان هي الدولة الأولى التي تتمتع بكثافة عالية في استخدام الروبوتات في صناعتها التحويلية.
الديناميكيات والكينماتيكا
يمكن تقسيم دراسة الحركة إلى علم الحركة المجردة (بالإنجليزية: kinematics) وعلم الديناميكيات المقيدة (بالإنجليزية: dynamics).[149] يشير علم الحركة المجردة المباشرة أو الحركة إلى الأمام إلى حساب موضع المستجيب النهائي واتجاهه وسرعته وتسارعه عندما تكون قيم المفصل الموافقة معروفة. في المقابل يشير علم الحركة المجردة المعكوسة إلى الحالة المعاكسة التي يتم فيها حساب القيم المشتركة المطلوبة لقيم المستجيب النهائي كما هو الحال في تخطيط المسار. تتضمن بعض الجوانب الخاصة لعلم الحركة المجردة التعامل مع التكرار (الاحتمالات المختلفة لأداء نفس الحركة) وتجنب الاصطدام وتجنب التفرد. بمجرد حساب جميع المواضع والسرعات والتسارعات ذات الصلة باستخدام علم الحركة المجردة يتم حينها استخدام طرق من مجال علم الديناميكيات المقيدة لدراسة تأثير القوى على هذه الحركات. تشير الديناميكيات المباشرة إلى حساب التسارع في الروبوت بمجرد معرفة القوى المطبقة. يتم استخدام الديناميكيات المباشرة في محاكاة الكمبيوتر للروبوت. تشير الديناميكيات المعكوسة إلى حساب قوى المشغل اللازمة لإنشاء تسارع محدد للمستجيب النهائي. يمكن استخدام هذه المعلومات لتحسين خوارزميات التحكم في الروبوت.
في كل مجال من المجالات المذكورة أعلاه يسعى الباحثون جاهدين لتطوير مفاهيم واستراتيجيات جديدة وتحسين المفاهيم القائمة وتحسين التفاعل بين هذه المجالات. للقيام بذلك يجب تطوير وتنفيذ معايير الأداء «الأمثل» وطرق تحسين التصميم والبنية والتحكم في الروبوتات.
هندسة الإلكترونيات الحيوية والمحاكاة الحيوية
إن هندسة الإلكترونيات الحيوية والمحاكاة الحيوية تطبق علم وظائف الأعضاء وطرق حركة الحيوانات على تصميم الروبوتات. على سبيل المثال، كان تصميم روبوت الكانغرو الحيوي (بالإنجليزية: BionicKangaroo) يعتمد على طريقة قفز الكنغر.
الحوسبة الكمية
كان هناك بعض الأبحاث حول ما إذا كان يمكن تشغيل خوارزميات الروبوتات بسرعة أكبر على أجهزة الكمبيوتر الكمومية مما يمكن تشغيلها على أجهزة الكمبيوتر الرقمية. تمت الإشارة إلى هذه المنطقة باسم الروبوتات الكمومية.[150]
التعليم والتدريب

يقوم مهندسو الروبوتات بتصميم الروبوتات وصيانتها وتطوير تطبيقات جديدة لها وإجراء البحوث لتوسيع إمكانات الروبوتات.[151] أصبحت الروبوتات أداة تعليمية شائعة في بعض المدارس المتوسطة والثانوية ولا سيما في أجزاء من الولايات المتحدة الأمريكية[102] وكذلك في العديد من المعسكرات الصيفية للشباب مما زاد الاهتمام بالبرمجة والذكاء الاصطناعي والروبوتات بين الطلاب.
التدريب الوظيفي
تقدم جامعات مثل معهد ورسستر للفنون التطبيقية درجات البكالوريوس والماجستير والدكتوراه في مجال الروبوتات.[152] تقدم المعاهد المهنية تدريبًا على الروبوتات يستهدف إعداد المتدربين لشغل الوظائف في مجال الروبوتية.
الشهادة
إن تحالف معايير شهادات الروبوتية هو سلطة دولية لإصدار شهادات الروبوتية والتي تقوم بمنح العديد من شهادات الروبوتية ذات الصلة بالصناعة والتعليم.
معسكر الروبوتات الصيفي
تتضمن العديد من برامج المعسكرات الصيفية الوطنية الروبوتية كجزء من مناهجها الدراسية الأساسية. بالإضافة إلى ذلك يتم تقديم برامج الروبوتية الصيفية للشباب في كثير من الأحيان من قبل المتاحف والمؤسسات الشهيرة.
مسابقات الروبوتية
هناك العديد من المسابقات حول العالم الخاصة بالروبوتية. يستهدف منهج سيبيرش (بالإنجليزية: SeaPerch) الطلاب من جميع الأعمار. هذه قائمة قصيرة من أمثلة المنافسة. للحصول على قائمة كاملة راجع مسابقة الروبوت.
مسابقات للأطفال الصغار
تقدم منظمة فيرست (بالإنجليزية: FIRST) مسابقات فيرست ليغو ليغ جونيور. للأطفال الصغار. تهدف هذه المسابقة إلى إتاحة الفرصة للأطفال الصغار لبدء التعلم عن العلوم والتكنولوجيا. يقوم الأطفال في هذه المسابقة ببناء نماذج ليغو ولديهم خيار استخدام مجموعة الروبوتات ليغو وي دو (بالإنجليزية: Lego WeDo).
مسابقات للأطفال من سن 9-14
واحدة من أهم المسابقات هي مسابقة منظمة فيرست لدوري الليغو (بالإنجليزية: FIRST_Lego_League). فكرة هذه المسابقة المحددة هي أن يبدأ الأطفال في تطوير المعرفة والدخول في الروبوتات أثناء اللعب باستخدام الليغو منذ أن يبلغوا التاسعة من العمر. ترتبط هذه المسابقة بالأدوات الوطنية. يستخدم الأطفال ليغو منيدستورمز أر سي إكس لحل التحديات الروبوتية المستقلة في هذه المسابقة.
مسابقات للمراهقين
تم تصميم مسابقة منظمة فيرست للتحدي التقني للطلاب المتوسطين لتكون مسابقة انتقالية من مسابقة منظمة فيرست لدوري الليغو إلى مسابقة منظمة فيرست للمنافسة الروبوتية.
إن مسابقة منظمة فيرست للمنافسة الروبوتية تركز على التصميم الميكانيكي حيث يتم لعب لعبة معينة كل عام حيث يكون قد تم تصميم الروبوتات خصيصًا للعبة ذلك العام. في لعبة المباراة يتحرك الروبوت بشكل مستقل خلال أول 15 ثانية من اللعبة (على الرغم من أن بعض السنوات مثل Deep Space لعام 2019 تم تغير هذه القاعدة) ومن ثم يتم تشغيله يدويًا لبقية المباراة.
مسابقات للطلاب الأكبر سنًا
تشمل مسابقات كأس الروبوتات (بالإنجليزية: RoboCup) المتنوعة فرقًا من المراهقين وطلاب الجامعات. تركز هذه المسابقات على مسابقات كرة القدم باستخدام أنواع مختلفة من الروبوتات ومسابقات الرقص ومسابقات البحث والإنقاذ في المناطق الحضرية. يجب أن تكون جميع الروبوتات في هذه المسابقات مستقلة. تركز بعض هذه المسابقات على محاكاة الروبوتات.
تدير منظمة آيه يو في اس آي (بالإنجليزية: AUVSI) مسابقة الروبوتات الجوية الدولية ومسابقة الزوارق المسيرة بدون بحار ومسابقة الروبوتات الغواصة تحت الماء.
تجذب مسابقة المنافسة الأوربية الخاصة بطلاب الإيه يو في[153] (بالإنجليزية: SAUC-E) فرق الطلاب الجامعيين والخريجين. كما هو الحال في مسابقات منظمة آيه يو في اس آي يجب أن تكون الروبوتات مستقلة تمامًا أثناء مشاركتها في المنافسة.
إن مسابقة تحدي ميكروترانسات هو مسابقة للإبحار بقارب روبوتي عبر المحيط الأطلسي.
المسابقات المفتوحة للجميع
إن ألعاب روبو غيمز متاحة لأي شخص يرغب في المنافسة في أكثر من 50 فئة من مسابقات الروبوت.
يقيم الاتحاد الدولي لكرة القدم الروبوتية مسابقات كأس العالم لكرة القدم الروبوتية (بالإنجليزية: FIRA). هناك مسابقات الروبوتات الطائرة ومسابقات كرة القدم الروبوتية وتحديات أخرى بما في ذلك رفع الأثقال الحديدية المصنوعة من المسامير والأقراص المدمجة.
برامج الروبوتات ما بعد المدرسة
بدأت العديد من المدارس في جميع أنحاء البلاد في إضافة برامج الروبوتات إلى مناهج ما بعد المدرسة. تتضمن بعض البرامج الرئيسية لروبوتات ما بعد المدرسة مسابقة الروبوتات الأولى ومسابقة كرة البوتبول ومسابقة أفضل روبوتية (بالإنجليزية: B.E.S.T. Robotics).[154] غالبًا ما تشتمل مسابقات الروبوتية على جوانب الأعمال والتسويق بالإضافة إلى الهندسة والتصميم.
بدأت شركة ليغو غروب برنامجًا للأطفال لتعلم الروبوتية والتحمس لها في سن مبكرة.[155]
الروبوتات التعليمية المخصصة لإزالة الهيمنة التعليمية
إن الروبوتات التعليمية المخصصة لإزالة الهيمنة التعليمية (بالإنجليزية: Decolonial) هي فرع من العلم التقني الخاص بإزالة الهيمنة التعليمية والذكاء الاصطناعي المخصص لإزالة الهيمنة التعليمية [156] والتي يتم تطبيقها في أماكن مختلفة حول العالم. تتلخص هذه المنهجية في النظريات والممارسات التربوية مثل أصول تعليم المقهورين ومنهج مونتيسور. إن هذه المنهجية تهدف إلى تعلم الروبوتات من الثقافة المحلية للحفاظ على التعددية الثقافية وخلط المعرفة التكنولوجية.[157]
توظيف
تعتبر الروبوتات مكونًا أساسيًا في العديد من بيئات التصنيع الحديثة. مع زيادة استخدام المصانع للروبوتات ينمو عدد الوظائف المتعلقة بالروبوتات وقد لوحظ أنها في ازدياد مستمر.[158] أدى توظيف الروبوتات في الصناعات إلى زيادة وفورات الإنتاجية والكفاءة ويُنظر إليه عادةً على أنه استثمار طويل الأجل للمتبرعين. لقد أظهرت ورقة قدمها كل من مايكل أوزبورن و كارل بينيديكت فراي أن 47 في المائة من الوظائف في الولايات المتحدة معرضة لخطر الأتمتة «على مدى بعض السنوات غير المحددة».[159] تم انتقاد هذه الادعاءات على أساس أن السياسة الاجتماعية وليس الذكاء الاصطناعي هي التي تسبب البطالة.[160] في مقال نُشر عام 2016 في صحيفة الغارديان صرح ستيفن هوكينج بأن «أتمتة المصانع قد قضت بالفعل على الوظائف في التصنيع التقليدي ومن المرجح أن يؤدي صعود الذكاء الاصطناعي إلى توسيع نطاق تدمير هذه الوظائف في أعماق الطبقات الوسطى مع توفير الرعاية والإبداع فقط أو الأدوار الإشرافية المتبقية».[161]
آثار السلامة والصحة المهنية
تسلط ورقة مناقشة أعدها الاتحاد الأوروبي والوكالة الأوروبية للسلامة والصحة في العمل (بالإنجليزية: OSHA) الضوء على كيف أن انتشار الروبوتات يقدم فرصًا وتحديات للسلامة والصحة المهنية.[162]
يجب أن تكون أعظم فوائد الصحة والسلامة المهنية الناشئة عن الاستخدام الأوسع للروبوتات هي الاستعاضة عن الأشخاص الذين يعملون في بيئات غير صحية أو خطرة كما هو الحال في الفضاء أو الدفاع أو الأمن أو الصناعة النووية ولكن أيضًا في اللوجستيات والصيانة والتفتيش تعد الروبوتات المستقلة مفيدة بشكل خاص في استبدال العمال البشريين الذين يؤدون مهام قذرة أو مملة أو غير آمنة وبالتالي تجنب تعرض العمال للعوامل والظروف الخطرة والحد من المخاطر الجسدية وغير المريحة من الناحية النفسية والاجتماعية. على سبيل المثال تُستخدم الروبوتات بالفعل لأداء مهام متكررة ورتيبة أو للتعامل مع المواد المشعة أو للعمل في أجواء متفجرة. في المستقبل سيتم تنفيذ العديد من المهام الأخرى شديدة التكرار أو الخطرة أو المملة بواسطة الروبوتات في مجموعة متنوعة من القطاعات مثل الزراعة أو البناء أو النقل أو الرعاية الصحية أو مكافحة الحرائق أو خدمات التنظيف.[163]
على الرغم من هذه التطورات هناك مهارات معينة سيكون البشر أكثر ملاءمة لها من الآلات لبعض الوقت في المستقبل والسؤال هو كيفية تحقيق أفضل مزيج من المهارات البشرية والروبوتية. تشمل مزايا الروبوتات قدرتها على القيام بالوظائف الشاقة بدقة وإمكانية التكرار بينما تشمل مزايا البشر القدرة على الإبداع واتخاذ القرار والمرونة بالإضافة إلى قدرة البشر على التكيف. لقد أدت هذه الحاجة إلى الجمع بين المهارات المثلى لكل من البشر والروبوتات إلى ظهور الروبوتات التعاونية حيث تتشارك مع البشر في مساحة عمل مشتركة بشكل أوثق وأدى هذا الأمر إلى تطوير مناهج ومعايير جديدة لضمان سلامة «اندماج الإنسان والروبوت». تقوم بعض الدول الأوروبية بتضمين الروبوتات في برامجها الوطنية وتحاول تعزيز التعاون الآمن والمرن بين الروبوتات والمشغلين لتحقيق إنتاجية أفضل. على سبيل المثال ينظم المعهد الاتحادي الألماني للسلامة والصحة المهنية BAuA ورش عمل سنوية حول موضوع «التعاون بين الإنسان والروبوت».
في المستقبل سيتنوع التعاون بين الروبوتات والبشر حيث تزيد الروبوتات من استقلاليتها ويصل التعاون بين الإنسان والروبوت إلى أشكال جديدة تمامًا. يجب مراجعة الأساليب الحالية والمعايير التقنية [164][165] التي تهدف إلى حماية الموظفين من مخاطر العمل مع الروبوتات التعاونية.
انظر أيضًا
- روبوت
- الذكاء الاصطناعي
- روبوت مستقل
- الروبوتية السحابية
- الروبوتية المعرفية
- الروبوتية التطورية
- الروبوتية الضبابية
- مسرد الروبوتات
- فهرس مقالات الروبوتات
- هندسة ميكاترونيكس
- نظام متعدد العوامل
- مخطط الروبوتات
- أخلاقيات الروبوتية
- حقوق الروبوت
- الفن الروبوتي
- الحوكمة الروبوتية
- الروبوتات اللينة
- روبوت معياري ذاتي التكوين
روابط خارجية
- روبوتية على مشروع الدليل المفتوح
- جمعية معهد مهندسي الكهرباء والإلكترونيات IEEE للروبوتات والأتمتة
- التحقيق في الروبوتية الاجتماعية - الروبوتات التي تحاكي السلوكيات والإيماءات البشرية.
- دليل ويرد (بالإنجليزية: Wired) الذي يعرض «أفضل 50 روبوتًا على الإطلاق»، مزيج من الروبوتات في الخيال (ربوت كيه تسعة (بالإنجليزية: K9) وروبوت أر تو دي تو (بالإنجليزية: R2D2) وروبوت هال (بالإنجليزية: Hal)) مع الروبوتات الحقيقية (روبوت رومبا (بالإنجليزية: Roomba) وروبوت موبوت (بالإنجليزية: Mobot) وربوت آيبوت (بالإنجليزية: Aibo)).
المراجع
- "German National Library"، International classification system of the German National Library (GND)، مؤرشف من الأصل في 19 أغسطس 2020.
- Nocks, Lisa (2007)، The robot : the life story of a technology، Westport, CT: Greenwood Publishing Group.
- Zunt, Dominik، "Who did actually invent the word "robot" and what does it mean?"، The Karel Čapek website، مؤرشف من الأصل في 23 يناير 2013، اطلع عليه بتاريخ 05 فبراير 2017.
- Asimov, Isaac (1996) [1995]، "The Robot Chronicles"، Gold، London: Voyager، ص. 224–225، ISBN 978-0-00-648202-4.
- Asimov, Isaac (1983)، "4 The Word I Invented"، Counting the Eons، Doubleday، Bibcode:1983coeo.book.....A،
Robotics has become a sufficiently well developed technology to warrant articles and books on its history and I have watched this in amazement, and in some disbelief, because I invented … the word
- Svoboda, Elizabeth (25 سبتمبر 2019)، "Your robot surgeon will see you now"، Nature (باللغة الإنجليزية)، 573 (7775): S110–S111، doi:10.1038/d41586-019-02874-0، PMID 31554995، مؤرشف من الأصل في 16 نوفمبر 2020.
- "Robotics: About the Exhibition"، The Tech Museum of Innovation، مؤرشف من الأصل في 13 سبتمبر 2008، اطلع عليه بتاريخ 15 سبتمبر 2008.
- Needham, Joseph (1991)، Science and Civilisation in China: Volume 2, History of Scientific Thought، Cambridge University Press، ISBN 978-0-521-05800-1.
- Fowler, Charles B. (أكتوبر 1967)، "The Museum of Music: A History of Mechanical Instruments"، Music Educators Journal، 54 (2): 45–49، doi:10.2307/3391092، JSTOR 3391092، S2CID 190524140.
- Rosheim, Mark E. (1994)، Robot Evolution: The Development of Anthrobotics، Wiley-IEEE، ص. 9–10، ISBN 978-0-471-02622-8، مؤرشف من الأصل في 25 فبراير 2021.
- al-Jazari (Islamic artist), موسوعة بريتانيكا. نسخة محفوظة 2008-05-07 على موقع واي باك مشين.
- Andrews, Evan (30 أغسطس 2018)، "7 Early Robots and Automatons"، History.com، مؤرشف من الأصل في 12 نوفمبر 2020.
- PhD, Renato M.E. Sabbatini، "Sabbatini, RME: An Imitation of Life: The First Robots"، مؤرشف من الأصل في 14 نوفمبر 2020.
- Waurzyniak, Patrick (2006)، "Masters of Manufacturing: Joseph F. Engelberger"، Society of Manufacturing Engineers، 137 (1)، مؤرشف من الأصل في 09 نوفمبر 2011.
- "Humanoid History -WABOT-"، www.humanoid.waseda.ac.jp، مؤرشف من الأصل في 30 نوفمبر 2020.
- Zeghloul؛ Laribi؛ Gazeau (21 سبتمبر 2015)، Robotics and Mechatronics: Proceedings of the 4th IFToMM International Symposium on Robotics and Mechatronics، Springer، ISBN 9783319223681، مؤرشف من الأصل في 15 سبتمبر 2020.
- "Historical Android Projects"، androidworld.com، مؤرشف من الأصل في 20 أكتوبر 2020.
- Robots: From Science Fiction to Technological Revolution, page 130 نسخة محفوظة 2020-10-29 على موقع واي باك مشين.
- Duffy, Vincent G. (19 أبريل 2016)، Handbook of Digital Human Modeling: Research for Applied Ergonomics and Human Factors Engineering، CRC Press، ISBN 9781420063523، مؤرشف من الأصل في 15 سبتمبر 2020.
- "KUKA Industrial Robot FAMULUS"، مؤرشف من الأصل في 18 يونيو 2016، اطلع عليه بتاريخ 10 يناير 2008.
- "History of Industrial Robots" (PDF)، مؤرشف من الأصل (PDF) في 24 ديسمبر 2012، اطلع عليه بتاريخ 27 أكتوبر 2012.
- S. Bozinovski, Parallel programming for mobile robot control: Agent based approach, Proc IEEE International Conference on Distributed Computing Systems, p. 202-208, Poznan, 1994 نسخة محفوظة 2020-08-06 على موقع واي باك مشين.
- Hunt, V. Daniel (1985)، "Smart Robots"، Smart Robots: A Handbook of Intelligent Robotic Systems، Chapman and Hall، ص. 141، ISBN 978-1-4613-2533-8.
- "Robot density rises globally"، Robotic Industries Association، 08 فبراير 2018، مؤرشف من الأصل في 23 نوفمبر 2020، اطلع عليه بتاريخ 03 ديسمبر 2018.
- Pinto, Jim (01 أكتوبر 2003)، "Fully automated factories approach reality"، Automation World، مؤرشف من الأصل في 01 أكتوبر 2011، اطلع عليه بتاريخ 03 ديسمبر 2018.
- Dragani, Rachelle (08 نوفمبر 2018)، "Can a robot make you a 'superworker'?"، فيرايزون للاتصالات، مؤرشف من الأصل في 06 أغسطس 2020، اطلع عليه بتاريخ 03 ديسمبر 2018.
- Pollock, Emily (07 يونيو 2018)، "Construction Robotics Industry Set to Double by 2023"، engineering.com، مؤرشف من الأصل في 07 أغسطس 2020، اطلع عليه بتاريخ 03 ديسمبر 2018.
- Grift, Tony E. (2004)، "Agricultural Robotics"، جامعة إلينوي في إربانا-شامبين، مؤرشف من الأصل في 04 مايو 2007، اطلع عليه بتاريخ 03 ديسمبر 2018.
- Thomas, Jim (01 نوفمبر 2017)، "How corporate giants are automating the farm"، New Internationalist، مؤرشف من الأصل في 10 يناير 2021، اطلع عليه بتاريخ 03 ديسمبر 2018.
- "OUCL Robot Sheepdog Project"، قسم علوم الحاسوب جامعة أكسفورد، 03 يوليو 2001، مؤرشف من الأصل في 14 يناير 2006، اطلع عليه بتاريخ 03 ديسمبر 2018.
- Kolodny, Lora (04 يوليو 2017)، "Robots are coming to a burger joint near you"، سي إن بي سي، مؤرشف من الأصل في 05 ديسمبر 2020، اطلع عليه بتاريخ 03 ديسمبر 2018.
- Corner, Stuart (23 نوفمبر 2017)، "AI-driven robot makes 'perfect' flatbread"، iothub.com.au، مؤرشف من الأصل في 24 نوفمبر 2020، اطلع عليه بتاريخ 03 ديسمبر 2018.
- Eyre, Michael (12 سبتمبر 2014)، "'Boris' the robot can load up dishwasher"، بي بي سي نيوز، مؤرشف من الأصل في 21 ديسمبر 2020، اطلع عليه بتاريخ 03 ديسمبر 2018.
- One database, developed by the وزارة الطاقة الأمريكية contains information on almost 500 existing robotic technologies and can be found on the D&D Knowledge Management Information Tool. نسخة محفوظة 2020-08-06 على موقع واي باك مشين.
- Kagan, Eugene, and Irad Ben-Gal (2015)، Search and foraging:individual motion and swarm dynamics، Chapman and Hall/CRC, 2015، ISBN 9781482242102، مؤرشف من الأصل في 07 فبراير 2021.
{{استشهاد بكتاب}}: صيانة CS1: أسماء متعددة: قائمة المؤلفون (link) - Dowling, Kevin، "Power Sources for Small Robots" (PDF)، Carnegie Mellon University، مؤرشف من الأصل (PDF) في 25 نوفمبر 2020، اطلع عليه بتاريخ 11 مايو 2012.
- Roozing, Wesley؛ Li؛ Tsagarakis؛ Caldwell (2016)، "Design Optimisation and Control of Compliant Actuation Arrangements in Articulated Robots for Improved Energy Efficiency"، IEEE Robotics and Automation Letters، 1 (2): 1110–1117، doi:10.1109/LRA.2016.2521926.
- Pratt, G.A.؛ Williamson (1995)، "Series elastic actuators"، IEEE Comput. Soc. Press، Pittsburgh, PA, USA، 1: 399–406، doi:10.1109/IROS.1995.525827، ISBN 978-0-8186-7108-1، مؤرشف من الأصل في 30 أكتوبر 2017.
- Bi-directional series-parallel elastic actuator and overlap of the actuation layers Raphaël Furnémont1, Glenn Mathijssen1,2, Tom Verstraten1, Dirk Lefeber1 and Bram Vanderborght1 Published 26 January 2016 • © 2016 IOP Publishing Ltd
- Pratt, Jerry E.؛ Krupp (2004)، "Series Elastic Actuators for legged robots"، في Gerhart, Grant R؛ Shoemaker, Chuck M؛ Gage, Douglas W (المحررون)، Unmanned Ground Vehicle Technology VI، Unmanned Ground Vehicle Technology Vi، ج. 5422، ص. 135–144، Bibcode:2004SPIE.5422..135P، doi:10.1117/12.548000.
- Li, Zhibin؛ Tsagarakis؛ Caldwell (2013)، "Walking Pattern Generation for a Humanoid Robot with Compliant Joints"، Autonomous Robots، 35 (1): 1–14، doi:10.1007/s10514-013-9330-7.
- Colgate, J. Edward (James Edward) (1988)، The control of dynamically interacting systems (Thesis thesis)، Massachusetts Institute of Technology، مؤرشف من الأصل في 06 نوفمبر 2016.
- Calanca, Andrea؛ Muradore؛ Fiorini (01 نوفمبر 2017)، "Impedance control of series elastic actuators: Passivity and acceleration-based control"، Mechatronics (باللغة الإنجليزية)، 47: 37–48، doi:10.1016/j.mechatronics.2017.08.010، ISSN 0957-4158، مؤرشف من الأصل في 7 فبراير 2021.
- Tosun, Fatih Emre؛ Patoglu (يونيو 2020)، "Necessary and Sufficient Conditions for the Passivity of Impedance Rendering With Velocity-Sourced Series Elastic Actuation"، IEEE Transactions on Robotics، 36 (3): 757–772، doi:10.1109/TRO.2019.2962332، ISSN 1552-3098، مؤرشف من الأصل في 7 فبراير 2021.
- www.imagesco.com, Images SI Inc -، "Air Muscle actuators, going further, page 6"، مؤرشف من الأصل في 14 نوفمبر 2020.
- "Air Muscles"، Shadow Robot، مؤرشف من الأصل في 27 سبتمبر 2007.
- Tondu, Bertrand (2012)، "Modelling of the McKibben artificial muscle: A review"، Journal of Intelligent Material Systems and Structures، 23 (3): 225–253، doi:10.1177/1045389X11435435.
- "TALKING ELECTRONICS Nitinol Page-1"، Talkingelectronics.com، مؤرشف من الأصل في 18 يناير 2020، اطلع عليه بتاريخ 27 نوفمبر 2010.
- "lf205, Hardware: Building a Linux-controlled walking robot"، Ibiblio.org، 01 نوفمبر 2001، مؤرشف من الأصل في 03 مارس 2016، اطلع عليه بتاريخ 27 نوفمبر 2010.
- "WW-EAP and Artificial Muscles"، Eap.jpl.nasa.gov، مؤرشف من الأصل في 20 يناير 2017، اطلع عليه بتاريخ 27 نوفمبر 2010.
- "Empa – a117-2-eap"، Empa.ch، مؤرشف من الأصل في 24 سبتمبر 2015، اطلع عليه بتاريخ 27 نوفمبر 2010.
- "Electroactive Polymers (EAP) as Artificial Muscles (EPAM) for Robot Applications"، Hizook، مؤرشف من الأصل في 06 أغسطس 2020، اطلع عليه بتاريخ 27 نوفمبر 2010.
- "Piezo LEGS – -09-26"، مؤرشف من الأصل في 30 يناير 2008، اطلع عليه بتاريخ 28 أكتوبر 2007.
- "Squiggle Motors: Overview"، مؤرشف من الأصل في 16 نوفمبر 2012، اطلع عليه بتاريخ 08 أكتوبر 2007.
- Nishibori؛ وآخرون (2003)، "Robot Hand with Fingers Using Vibration-Type Ultrasonic Motors (Driving Characteristics)"، Journal of Robotics and Mechatronics، 15 (6): 588–595، doi:10.20965/jrm.2003.p0588.
- Otake؛ وآخرون (2001)، "Shape Design of Gel Robots made of Electroactive Polymer trolo Gel" (PDF)، مؤرشف من الأصل (PDF) في 25 نوفمبر 2020، اطلع عليه بتاريخ 16 أكتوبر 2007.
{{استشهاد بدورية محكمة}}: Cite journal requires|journal=(مساعدة) - John D. Madden, 2007, /science.1146351
- "Syntouch LLC: BioTac(R) Biomimetic Tactile Sensor Array"، مؤرشف من الأصل في 03 أكتوبر 2009، اطلع عليه بتاريخ 10 أغسطس 2009.
- Wettels, N؛ Santos؛ Johansson؛ Loeb؛ وآخرون (2008)، "Biomimetic tactile sensor array"، Advanced Robotics، 22 (8): 829–849، doi:10.1163/156855308X314533.
- "What is The SmartHand?"، SmartHand Project، مؤرشف من الأصل في 03 مارس 2015، اطلع عليه بتاريخ 04 فبراير 2011.
- Arreguin, Juan (2008)، Automation and Robotics، Vienna, Austria: I-Tech and Publishing، مؤرشف من الأصل في 5 مارس 2022.
- Mason, Matthew T. (2001)، Mechanics of Robotic Manipulation، doi:10.7551/mitpress/4527.001.0001، ISBN 9780262256629.
- "What is a robotic end-effector?"، ATI Industrial Automation، 2007، مؤرشف من الأصل في 17 ديسمبر 2020، اطلع عليه بتاريخ 16 أكتوبر 2007.
- Crane, Carl D.؛ Joseph Duffy (1998)، Kinematic Analysis of Robot Manipulators، Cambridge University Press، ISBN 978-0-521-57063-3، مؤرشف من الأصل في 02 أبريل 2020، اطلع عليه بتاريخ 16 أكتوبر 2007.
- G.J. Monkman, S. Hesse, R. Steinmann & H. Schunk (2007). Robot Grippers. Berlin: Wiley
- "Annotated Mythbusters: Episode 78: Ninja Myths – Walking on Water, Catching a Sword, Catching an Arrow"، مؤرشف من الأصل في 12 نوفمبر 2020. (Discovery Channel's Mythbusters making mechanical gripper from chain and metal wire)
- Robonaut hand نسخة محفوظة 2020-02-22 على موقع واي باك مشين.
- "Delft hand"، جامعة دلفت للتكنولوجيا، مؤرشف من الأصل في 03 فبراير 2012، اطلع عليه بتاريخ 21 نوفمبر 2011.
- M&C، "TU Delft ontwikkelt goedkope, voorzichtige robothand"، مؤرشف من الأصل في 13 مارس 2017.
- "astrictive definition – English definition dictionary – Reverso"، مؤرشف من الأصل في 30 أبريل 2020.
- Tijsma, H. A.؛ Liefhebber؛ Herder (01 يونيو 2005)، "Evaluation of new user interface features for the MANUS robot arm"، 9th International Conference on Rehabilitation Robotics, 2005. ICORR 2005، ص. 258–263، doi:10.1109/ICORR.2005.1501097، ISBN 978-0-7803-9003-4.
- Allcock, Andrew (2006)، "Anthropomorphic hand is almost human"، Machinery، مؤرشف من الأصل في 28 سبتمبر 2007، اطلع عليه بتاريخ 17 أكتوبر 2007.
- "Welcome"، مؤرشف من الأصل في 25 يناير 2021.
- "T.O.B.B"، Mtoussaint.de، مؤرشف من الأصل في 08 يوليو 2020، اطلع عليه بتاريخ 27 نوفمبر 2010.
- "nBot, a two wheel balancing robot"، Geology.heroy.smu.edu، مؤرشف من الأصل في 26 يناير 2021، اطلع عليه بتاريخ 27 نوفمبر 2010.
- "ROBONAUT Activity Report"، ناسا، 2004، مؤرشف من الأصل في 20 أغسطس 2007، اطلع عليه بتاريخ 20 أكتوبر 2007.
- "IEEE Spectrum: A Robot That Balances on a Ball"، Spectrum.ieee.org، 29 أبريل 2010، مؤرشف من الأصل في 09 نوفمبر 2020، اطلع عليه بتاريخ 27 نوفمبر 2010.
- "Carnegie Mellon Researchers Develop New Type of Mobile Robot That Balances and Moves on a Ball Instead of Legs or Wheels" (Press release)، Carnegie Mellon، 09 أغسطس 2006، مؤرشف من الأصل في 09 يونيو 2007، اطلع عليه بتاريخ 20 أكتوبر 2007.
- "Spherical Robot Can Climb Over Obstacles"، BotJunkie، مؤرشف من الأصل في 28 مارس 2012، اطلع عليه بتاريخ 27 نوفمبر 2010.
- "Rotundus"، Rotundus.se، مؤرشف من الأصل في 24 أغسطس 2011، اطلع عليه بتاريخ 27 نوفمبر 2010.
- "OrbSwarm Gets A Brain"، BotJunkie، 11 يوليو 2007، مؤرشف من الأصل في 16 مايو 2012، اطلع عليه بتاريخ 27 نوفمبر 2010.
- "Rolling Orbital Bluetooth Operated Thing"، BotJunkie، مؤرشف من الأصل في 28 مارس 2012، اطلع عليه بتاريخ 27 نوفمبر 2010.
- "Swarm"، Orbswarm.com، مؤرشف من الأصل في 26 يناير 2021، اطلع عليه بتاريخ 27 نوفمبر 2010.
- "The Ball Bot : Johnnytronic@Sun"، Blogs.sun.com، مؤرشف من الأصل في 24 أغسطس 2011، اطلع عليه بتاريخ 27 نوفمبر 2010.
- "Senior Design Projects | College of Engineering & Applied Science| University of Colorado at Boulder"، Engineering.colorado.edu، 30 أبريل 2008، مؤرشف من الأصل في 24 أغسطس 2011، اطلع عليه بتاريخ 27 نوفمبر 2010.
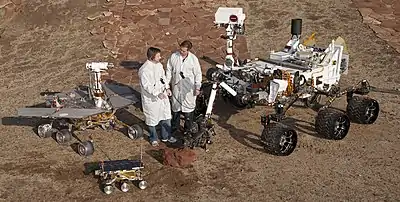
- "JPL Robotics: System: Commercial Rovers"، مؤرشف من الأصل في 17 أكتوبر 2020.
- "AMBER Lab"، مؤرشف من الأصل في 25 نوفمبر 2020.
- "Micromagic Systems Robotics Lab"، مؤرشف من الأصل في 27 أكتوبر 2020.
- "AMRU-5 hexapod robot" (PDF)، مؤرشف من الأصل (PDF) في 25 نوفمبر 2020.
- "Achieving Stable Walking"، Honda Worldwide، مؤرشف من الأصل في 30 سبتمبر 2018، اطلع عليه بتاريخ 22 أكتوبر 2007.
- "Funny Walk"، Pooter Geek، 28 ديسمبر 2004، مؤرشف من الأصل في 01 أكتوبر 2020، اطلع عليه بتاريخ 22 أكتوبر 2007.
- "ASIMO's Pimp Shuffle"، Popular Science، 09 يناير 2007، مؤرشف من الأصل في 09 نوفمبر 2020، اطلع عليه بتاريخ 22 أكتوبر 2007.
- "The Temple of VTEC – Honda and Acura Enthusiasts Online Forums > Robot Shows Prime Minister How to Loosen Up > > A drunk robot?"، مؤرشف من الأصل في 30 أبريل 2020.
- "3D One-Leg Hopper (1983–1984)"، MIT Leg Laboratory، مؤرشف من الأصل في 11 نوفمبر 2020، اطلع عليه بتاريخ 22 أكتوبر 2007.
- "3D Biped (1989–1995)"، MIT Leg Laboratory، مؤرشف من الأصل في 31 يناير 2021.
- "Quadruped (1984–1987)"، MIT Leg Laboratory، مؤرشف من الأصل في 06 أغسطس 2020.
- "MIT Leg Lab Robots- Main"، مؤرشف من الأصل في 07 أغسطس 2020.
- "About the robots"، Anybots، مؤرشف من الأصل في 09 سبتمبر 2007، اطلع عليه بتاريخ 23 أكتوبر 2007.
- "Homepage"، Anybots، مؤرشف من الأصل في 26 يناير 2021، اطلع عليه بتاريخ 23 أكتوبر 2007.
- "Dexter Jumps video"، YouTube، 01 مارس 2007، مؤرشف من الأصل في 8 فبراير 2020، اطلع عليه بتاريخ 23 أكتوبر 2007.
- Collins, Steve؛ Wisse, Martijn؛ Ruina, Andy؛ Tedrake, Russ (11 فبراير 2005)، "Efficient bipedal robots based on passive-dynamic Walkers" (PDF)، Science، 307 (5712): 1082–1085، Bibcode:2005Sci...307.1082C، doi:10.1126/science.1107799، PMID 15718465، مؤرشف من الأصل (PDF) في 22 يونيو 2007، اطلع عليه بتاريخ 11 سبتمبر 2007.
-
{{استشهاد بمنشورات مؤتمر}}: استشهاد فارغ! (مساعدة) - "Testing the Limits" (PDF)، Boeing، ص. 29، مؤرشف من الأصل (PDF) في 25 نوفمبر 2020، اطلع عليه بتاريخ 09 أبريل 2008.
- Miller, Gavin، "Introduction"، snakerobots.com، مؤرشف من الأصل في 26 يناير 2021، اطلع عليه بتاريخ 22 أكتوبر 2007.
- "ACM-R5"، مؤرشف من الأصل في 11 أكتوبر 2011.
- "Swimming snake robot (commentary in Japanese)"، مؤرشف من الأصل في 08 فبراير 2012.
- "Commercialized Quadruped Walking Vehicle "TITAN VII""، Hirose Fukushima Robotics Lab، مؤرشف من الأصل في 06 نوفمبر 2007، اطلع عليه بتاريخ 23 أكتوبر 2007.
- "Plen, the robot that skates across your desk"، SCI FI Tech، 23 يناير 2007، مؤرشف من الأصل في 11 أكتوبر 2007، اطلع عليه بتاريخ 23 أكتوبر 2007.
- Capuchin على يوتيوب
- Wallbot على يوتيوب
- Stanford University: Stickybot على يوتيوب
- Sfakiotakis؛ وآخرون (1999)، "Review of Fish Swimming Modes for Aquatic Locomotion" (PDF)، IEEE Journal of Oceanic Engineering، 24 (2): 237–252، Bibcode:1999IJOE...24..237S، doi:10.1109/48.757275، مؤرشف من الأصل (PDF) في 26 سبتمبر 2007، اطلع عليه بتاريخ 24 أكتوبر 2007.
- Richard Mason، "What is the market for robot fish?"، مؤرشف من الأصل في 04 يوليو 2009.
- "Robotic fish powered by Gumstix PC and PIC"، Human Centred Robotics Group at Essex University، مؤرشف من الأصل في 24 أغسطس 2011، اطلع عليه بتاريخ 25 أكتوبر 2007.
- Witoon Juwarahawong، "Fish Robot"، Institute of Field Robotics، مؤرشف من الأصل في 04 نوفمبر 2007، اطلع عليه بتاريخ 25 أكتوبر 2007.
- "YouTube"، مؤرشف من الأصل في 2 يناير 2021.
- "High-Speed Robotic Fish | iSplash"، isplash-robot (باللغة الإنجليزية)، مؤرشف من الأصل في 11 مارس 2020، اطلع عليه بتاريخ 07 يناير 2017.
- "iSplash-II: Realizing Fast Carangiform Swimming to Outperform a Real Fish" (PDF)، Robotics Group at Essex University، مؤرشف من الأصل (PDF) في 15 ديسمبر 2018، اطلع عليه بتاريخ 29 سبتمبر 2015.
- "iSplash-I: High Performance Swimming Motion of a Carangiform Robotic Fish with Full-Body Coordination" (PDF)، Robotics Group at Essex University، مؤرشف من الأصل (PDF) في 05 مارس 2016، اطلع عليه بتاريخ 29 سبتمبر 2015.
- Jaulin, L.؛ Le Bars (2012)، "An interval approach for stability analysis; Application to sailboat robotics" (PDF)، IEEE Transactions on Robotics، 27 (5)، مؤرشف من الأصل (PDF) في 25 نوفمبر 2020.
- Pires, J. Norberto (2005)، "Robot-by-voice: experiments on commanding an industrial robot using the human voice" (PDF)، Industrial Robot: An International Journal، 32 (6): 505–511، doi:10.1108/01439910510629244، مؤرشف من الأصل (PDF) في 03 أكتوبر 2018.
- "Survey of the State of the Art in Human Language Technology: 1.2: Speech Recognition"، مؤرشف من الأصل في 11 نوفمبر 2007.
- Fournier, Randolph Scott., and B. June. Schmidt. "Voice Input Technology: Learning Style and Attitude Toward Its Use." Delta Pi Epsilon Journal 37 (1995): 1_12.
- "History of Speech & Voice Recognition and Transcription Software"، Dragon Naturally Speaking، مؤرشف من الأصل في 19 ديسمبر 2020، اطلع عليه بتاريخ 27 أكتوبر 2007.
- Cheng Lin, Kuan؛ Huang؛ Hung؛ Yen؛ Ju Chen (07 يونيو 2013)، "Facial emotion recognition towards affective computing‐based learning"، Library Hi Tech (باللغة الإنجليزية)، 31 (2): 294–307، doi:10.1108/07378831311329068، ISSN 0737-8831.
- M.L. Walters, D.S. Syrdal, K.L. Koay, K. Dautenhahn, R. te Boekhorst, (2008). Human approach distances to a mechanical-looking robot with different robot voice styles. In: Proceedings of the 17th IEEE International Symposium on Robot and Human Interactive Communication, 2008. RO-MAN 2008, Munich, 1–3 Aug 2008, pp. 707–712, دُوِي:10.1109/ROMAN.2008.4600750. Available: online and pdf نسخة محفوظة 18 July 2011 على موقع واي باك مشين.
- Sandra Pauletto, Tristan Bowles, (2010). Designing the emotional content of a robotic speech signal. In: Proceedings of the 5th Audio Mostly Conference: A Conference on Interaction with Sound, New York, (ردمك 978-1-4503-0046-9), دُوِي:10.1145/1859799.1859804. Available: online نسخة محفوظة 8 مارس 2020 على موقع واي باك مشين.
- Tristan Bowles, Sandra Pauletto, (2010). Emotions in the Voice: Humanising a Robotic Voice. In: Proceedings of the 7th Sound and Music Computing Conference, Barcelona, Spain.
- "World of 2-XL: Leachim"، www.2xlrobot.com، مؤرشف من الأصل في 05 يوليو 2020، اطلع عليه بتاريخ 28 مايو 2019.
- "The Boston Globe from Boston, Massachusetts on June 23, 1974 · 132"، Newspapers.com (باللغة الإنجليزية)، مؤرشف من الأصل في 10 يناير 2020، اطلع عليه بتاريخ 28 مايو 2019.
- "cyberneticzoo.com - Page 135 of 194 - a history of cybernetic animals and early robots"، cyberneticzoo.com (باللغة الإنجليزية)، مؤرشف من الأصل في 06 أغسطس 2020، اطلع عليه بتاريخ 28 مايو 2019.
- Waldherr, Romero & Thrun (2000)، "A Gesture Based Interface for Human-Robot Interaction" (PDF)، Kluwer Academic Publishers، مؤرشف من الأصل (PDF) في 25 نوفمبر 2020، اطلع عليه بتاريخ 28 أكتوبر 2007.
- Markus Kohler (2012)، "Vision Based Hand Gesture Recognition Systems"، University of Dortmund، 263–266: 2422–2425، Bibcode:2012AMM...263.2422L، doi:10.4028/www.scientific.net/AMM.263-266.2422، مؤرشف من الأصل في 11 يوليو 2012، اطلع عليه بتاريخ 28 أكتوبر 2007.
- "Frubber facial expressions"، مؤرشف من الأصل في 07 فبراير 2009.
- "Best Inventions of 2008 – TIME"، Time، 29 أكتوبر 2008، مؤرشف من الأصل في 22 أغسطس 2013.
- "Kismet: Robot at MIT's AI Lab Interacts With Humans"، Sam Ogden، مؤرشف من الأصل في 12 أكتوبر 2007، اطلع عليه بتاريخ 28 أكتوبر 2007.
- "(Park et al. 2005) Synthetic Personality in Robots and its Effect on Human-Robot Relationship" (PDF)، مؤرشف من الأصل (PDF) في 30 نوفمبر 2020.
- "Robot Receptionist Dishes Directions and Attitude"، مؤرشف من الأصل في 01 ديسمبر 2020.
- "New Scientist: A good robot has personality but not looks" (PDF)، مؤرشف من الأصل (PDF) في 29 سبتمبر 2006.
- "Playtime with Pleo, your robotic dinosaur friend"، مؤرشف من الأصل في 20 يناير 2019.
- Jennifer Bogo (31 أكتوبر 2014)، "Meet a woman who trains robots for a living"، مؤرشف من الأصل في 20 سبتمبر 2020.
- "A Ping-Pong-Playing Terminator"، Popular Science، مؤرشف من الأصل في 22 يناير 2021.
- "Synthiam Exosphere combines AI, human operators to train robots"، The Robot Report، مؤرشف من الأصل في 06 أكتوبر 2020.
- NOVA conversation with Professor Moravec, October 1997. NOVA Online نسخة محفوظة 2021-01-25 على موقع واي باك مشين.
- Sandhana, Lakshmi (05 سبتمبر 2002)، "A Theory of Evolution, for Robots"، Wired، مؤرشف من الأصل في 29 مارس 2014، اطلع عليه بتاريخ 28 أكتوبر 2007.
- Experimental Evolution In Robots Probes The Emergence Of Biological Communication، Science Daily، 24 فبراير 2007، مؤرشف من الأصل في 25 يناير 2021، اطلع عليه بتاريخ 28 أكتوبر 2007.
- Žlajpah, Leon (15 ديسمبر 2008)، "Simulation in robotics"، Mathematics and Computers in Simulation، 79 (4): 879–897، doi:10.1016/j.matcom.2008.02.017.
- News, Technology Research، "Evolution trains robot teams TRN 051904"، www.trnmag.com، مؤرشف من الأصل في 26 يناير 2021.
- Agarwal, P.K.، Elements of Physics XI، Rastogi Publications، ص. 2، ISBN 978-81-7133-911-2، مؤرشف من الأصل في 29 مايو 2016.
- Tandon, Prateek (2017)، Quantum Robotics، Morgan & Claypool Publishers، ISBN 978-1627059138.
- "Career: Robotics Engineer"، Princeton Review، 2012، مؤرشف من الأصل في 21 يناير 2015، اطلع عليه بتاريخ 27 يناير 2012.
- "Robotics Degree Programs at Worcester Polytechnic Institute"، Worcester Polytechnic Institute، 2013، مؤرشف من الأصل في 12 أغسطس 2016، اطلع عليه بتاريخ 12 أبريل 2013.
- "Student AUV Competition Europe"، مؤرشف من الأصل في 19 يناير 2021.
- "B.E.S.T. Robotics"، مؤرشف من الأصل في 03 سبتمبر 2019.
- "LEGO® Building & Robotics After School Programs"، مؤرشف من الأصل في 14 فبراير 2020، اطلع عليه بتاريخ 05 نوفمبر 2014.
- Mohamed, Shakir؛ Png؛ Isaac (2020)، "Decolonial AI: Decolonial Theory as Sociotechnical Foresight in Artificial Intelligence"، Philosophy & Technology، 33 (4): 659–684، arXiv:2007.04068، doi:10.1007/s13347-020-00405-8.
- "Decolonial Robotics"، 09 سبتمبر 2020، مؤرشف من الأصل في 23 أكتوبر 2020، اطلع عليه بتاريخ 12 أغسطس 2020.
- Toy, Tommy (29 يونيو 2011)، "Outlook for robotics and Automation for 2011 and beyond are excellent says expert"، PBT Consulting، مؤرشف من الأصل في 03 أغسطس 2020، اطلع عليه بتاريخ 27 يناير 2012.
- Frey, Carl Benedikt؛ Osborne (01 يناير 2017)، "The future of employment: How susceptible are jobs to computerisation?"، Technological Forecasting and Social Change، 114: 254–280، doi:10.1016/j.techfore.2016.08.019، ISSN 0040-1625.
- E McGaughey, 'Will Robots Automate Your Job Away? Full Employment, Basic Income, and Economic Democracy' (2018) SSRN, part 2(3). DH Autor, ‘Why Are There Still So Many Jobs? The History and Future of Workplace Automation’ (2015) 29(3) Journal of Economic Perspectives 3. نسخة محفوظة 2021-01-31 على موقع واي باك مشين.
- Hawking, Stephen (01 يناير 2016)، "This is the most dangerous time for our planet"، The Guardian، مؤرشف من الأصل في 31 يناير 2021، اطلع عليه بتاريخ 22 نوفمبر 2019.
- "Focal Points Seminar on review articles in the future of work – Safety and health at work – EU-OSHA"، osha.europa.eu، مؤرشف من الأصل في 25 يناير 2020، اطلع عليه بتاريخ 19 أبريل 2016.
- "Robotics: Redefining crime prevention, public safety and security"، SourceSecurity.com، مؤرشف من الأصل في 09 أكتوبر 2017.
- "Draft Standard for Intelligent Assist Devices — Personnel Safety Requirements" (PDF)، مؤرشف من الأصل (PDF) في 25 نوفمبر 2020.
- "ISO/TS 15066:2016 – Robots and robotic devices – Collaborative robots"، مؤرشف من الأصل في 10 أكتوبر 2016.
| المقالات الرئيسية |
| |
|---|---|---|
| الأنواع |
| |
| التصنيفات |
| |
| الحركة |
| |
| أبحاث |
| |
| ||
 بوابة هندسة ميكانيكية
بوابة هندسة ميكانيكية بوابة صناعة
بوابة صناعة بوابة هندسة
بوابة هندسة بوابة روبوتيات
بوابة روبوتيات بوابة تقانة
بوابة تقانة