Ecuación
Una ecuación es una igualdad matemática entre dos expresiones, denominadas miembros y separadas por el signo igual, en las que aparecen elementos conocidos y datos desconocidos o incógnitas, relacionados mediante operaciones matemáticas. Los valores conocidos pueden ser números, coeficientes o constantes, también variables o incluso objetos complejos como funciones o vectores; los elementos desconocidos pueden ser establecidos mediante otras ecuaciones de un sistema o algún otro procedimiento de resolución de ecuaciones.[nota 1] Las incógnitas, representadas generalmente por letras, constituyen los valores que se pretende hallar (en ecuaciones complejas en lugar de valores numéricos podría tratarse de elementos de un cierto conjunto abstracto, como sucede en las ecuaciones diferenciales). Por ejemplo, en la ecuación algebraica siguiente:

la variable representa la incógnita, mientras que el coeficiente 3 y los números 1 y 9 son constantes conocidas. La igualdad planteada por una ecuación será cierta o falsa dependiendo de los valores numéricos que tomen las incógnitas; se puede afirmar entonces que una ecuación es una igualdad condicional, en la que solo ciertos valores de las variables (incógnitas) la hacen cierta.

Se llama solución de una ecuación a cualquier valor individual de dichas variables que la satisface. Para el caso dado, la solución es:

En el caso de que todo valor posible de la incógnita haga cumplir la igualdad, la expresión se llama identidad. Si en lugar de una igualdad se trata de una desigualdad entre dos expresiones matemáticas, se denominará inecuación.
El símbolo «=», que aparece en cada ecuación, fue inventado en 1557 por Robert Recorde, quien consideró que no había nada más igual que dos líneas rectas paralelas de la misma longitud.[1]
Una ecuación se escribe como dos expresiones, conectadas por un signo igual ("=").[2][3][4] Las expresiones en los dos lados del signo igual se denominan "lado izquierdo" y "lado derecho" de la ecuación. Muy a menudo se supone que el lado derecho de una ecuación es cero. Suponiendo que esto no reduce la generalidad, ya que esto se puede realizar restando el lado derecho de ambos lados.
El tipo más común de ecuación es una ecuación polinomial (comúnmente llamada también ecuación algebraica ) en la que los dos lados son polinomios. Los lados de una ecuación polinomial contienen uno o más términos . Por ejemplo, la ecuación

tiene el lado izquierdo , que tiene cuatro términos, y el lado derecho , que consta de un solo término. Los nombres de las variables sugieren que x ∧ y son incógnitas, y que A, B, y C son parámetros, pero esto es normalmente fijado por el contexto (en algunos contextos, y puede ser un parámetro, o A, B, y C pueden ser variables ordinarias).


Una ecuación es análoga a una balanza en la que se colocan pesos. Cuando se colocan pesos iguales de algo (por ejemplo, grano) en los dos platillos, los dos pesos hacen que la balanza esté en equilibrio y se dice que son iguales. Si se retira una cantidad de grano de uno de los platillos de la balanza, debe retirarse una cantidad igual de grano del otro platillo para que la balanza siga en equilibrio. Más generalmente, una ecuación permanece en equilibrio si se realiza la misma operación en sus dos lados.
En geometría cartesiana las ecuaciones se utilizan para describir figuras geométricas. Puesto que las ecuaciones que se plantean, como las ecuaciones implícitas o las ecuaciones paramétricas, tienen infinitas soluciones, el objetivo es ahora diferente: en lugar de dar las soluciones explícitamente o contarlas, lo que es imposible, se utilizan las ecuaciones para estudiar las propiedades de las figuras. Esta es la idea de partida de la geometría algebraica, una importante área de las matemáticas.
El Álgebra estudia dos grandes familias de ecuaciones: ecuaciones polinómicas y, entre ellas, el caso especial de las ecuaciones lineales. Cuando hay una sola variable, las ecuaciones polinómicas tienen la forma P(x) = 0, donde P es un polinomio, y las ecuaciones lineales tienen la forma ax + b = 0, donde a y b son parámetros. Para resolver ecuaciones de cualquiera de las dos familias, se utilizan técnicas algorítmicas o geométricas que provienen del álgebra lineal o del análisis matemático. El álgebra también estudia las ecuaciones diofantinas en las que los coeficientes y las soluciones son números enteros. Las técnicas utilizadas son diferentes y provienen de la teoría de números. Estas ecuaciones son difíciles en general; a menudo se busca sólo encontrar la existencia o ausencia de una solución y, si existe una o varias, hallar el número de soluciones.
Las ecuaciones diferenciales son ecuaciones que involucran una o más funciones y sus derivadas. Se resuelven encontrando una expresión para la función que no implique derivadas. Las ecuaciones diferenciales se utilizan para modelar procesos que implican las tasas de cambio de la variable,y se utilizan en áreas como la física, la química, la biología y la economía.
Introducción
Ilustraciónes análogas
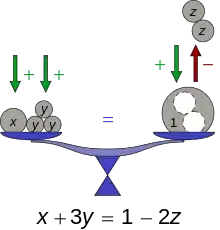
Cada lado de la ecuación corresponde a un lado de una balanza. En cada lado se pueden colocar cantidades diferentes: si los pesos de los dos lados son iguales, la balanza se equilibra, y por analogía, la igualdad que representa la balanza también se equilibra (si no, la falta de equilibrio corresponde a una desigualdad representada por una inecuación).
En la ilustración, x, y y z son cantidades diferentes (en este caso números reales) representadas como pesos circulares, y cada una de x, y y z tiene un peso diferente. La suma corresponde a añadir peso, mientras que la resta corresponde a quitar peso del que ya hay. Cuando la igualdad se mantiene, el peso total de cada lado es el mismo.
Parámetros e incógnitas
Las ecuaciones a menudo contienen términos distintos de las incógnitas. Estos otros términos, que se suponen conocidos, suelen llamarse constantes, coeficientes o parámetros.
Un ejemplo de una ecuación que implica x e y como incógnitas y el parámetro R es

Cuando se elige que R tenga el valor de 2 (R = 2), esta ecuación se reconocería en coordenadas cartesianas como la ecuación del círculo de radio 2 alrededor del origen. Por lo tanto, la ecuación con R sin especificar es la ecuación general del círculo.
Normalmente, las incógnitas se denotan con letras del final del alfabeto, x, y, z, w, ...,[2] mientras que los coeficientes (parámetros) se denotan con letras del principio, a, b, c, d, ... . Por ejemplo, la ecuación cuadrática general se suele escribir ax2 + bx + c = 0.
El proceso de encontrar las soluciones o, en el caso de los parámetros, de expresar las incógnitas en términos de los parámetros, se llama resolución de la ecuación. Tales expresiones de las soluciones en términos de los parámetros también se llaman soluciones.
Un sistema de ecuaciones es un conjunto de ecuaciones simultáneas, normalmente en varias incógnitas, para las que se buscan las soluciones comunes. Así, una solución del sistema es un conjunto de valores para cada una de las incógnitas que juntos forman una solución para cada ecuación del sistema. Por ejemplo, el sistema

tiene como única solución x = -1, y = 1.
Uso de ecuaciones
La ciencia utiliza ecuaciones para enunciar leyes de forma precisa; estas ecuaciones expresan relaciones entre variables. Así, en física, la ecuación de la dinámica de Newton relaciona las variables fuerza F, aceleración a y masa m: F = ma. Los valores que son solución de la ecuación anterior cumplen la primera ley de la mecánica de Newton. Por ejemplo, si se considera una masa m = 1 kg y una aceleración a = 1 m/s^2, la única solución de la ecuación es F = 1 kg·m/s^2 = 1 newton, que es el único valor para la fuerza permitida por esta ley.
Ejemplos:
El campo de aplicación de las ecuaciones es inmenso, y por ello hay una gran cantidad de investigadores dedicados a su estudio.
Según autores como Ian Stewart, "el poder de las ecuaciones (...) recae en la correspondencia filosóficamente difícil entre las matemáticas —una creación colectiva de mentes humanas— y una realidad física externa."[5]
Identidades
Una identidad es una expresión matemática que es verdadera para todos los valores posibles de la(s) variable(s) que contiene. Se conocen muchas identidades en álgebra y cálculo. En el proceso de resolver una ecuación, una identidad se utiliza a menudo para simplificar una ecuación, haciéndola más fácil de resolver.
En álgebra, un ejemplo de identidad es la diferencia de dos cuadrados:

que es verdadera para todas las x e y.
La Trigonometría es un área donde existen muchas identidades; éstas son útiles para manipular o resolver ecuaciones trigonométricas. Dos de las muchas que involucran las funciones seno y coseno son:

y

que son ambas verdaderas para todos los valores de θ.
Por ejemplo, para resolver el valor de θ que satisface la ecuación:

donde θ se limita a entre 0 y 45 grados, se puede utilizar la identidad anterior para el producto para dar:

dando la siguiente solución para 'θ:

Como la función seno es una función periódica, hay infinitas soluciones si no hay restricciones en θ. En este ejemplo, restringir θ para que esté entre 0 y 45 grados restringiría la solución a un solo número.
Historia
Antigüedad
Ya en el siglo XVI a. C., los egipcios resolvían problemas cotidianos que tenían que ver con la repartición de víveres, de cosechas y de materiales que equivalían a resolver ecuaciones algebraicas simples de primer grado; como la notación algebraica no existía, usaban un método iterativo aproximado, llamado «método de la falsa posición».
Los matemáticos chinos de principios de nuestra era escribieron el libro Los nueve capítulos sobre el arte matemático, en el que plantearon diversos métodos para resolver ecuaciones algebraicas de primero y segundo grado, así como sistemas de dos ecuaciones con dos incógnitas.
El matemático griego Diofanto de Alejandría publicó su Arithmetica en el siglo III tratando las ecuaciones de primer y segundo grado; fue uno de los primeros en utilizar símbolos para representar las ecuaciones. También planteó las ecuaciones con soluciones enteras, llamadas en su honor ecuaciones diofánticas.[6]
Siglos XV-XVI
En la Edad Moderna, el estudio de las ecuaciones algebraicas experimenta un gran impulso. En el siglo XV estaban a la orden del día los desafíos matemáticos públicos, con premios al vencedor; así, un desafío famoso enfrentó a dos matemáticos a resolver ecuaciones de tercer grado, el vencedor fue Niccolò Fontana Tartaglia, experto algebrista.
Hacia mediados del siglo XVI los matemáticos italianos Girolamo Cardano y Rafael Bombelli descubrieron que para poder resolver todas las ecuaciones de segundo, tercero y cuarto grado, el uso de los números imaginarios era indispensable. Cardano, enemigo acérrimo de Tartaglia, también halló métodos de resolución de ecuaciones de cuarto grado.
En el mismo siglo, el matemático francés René Descartes popularizó la notación algebraica moderna, en la cual las constantes están representadas por las primeras letras del alfabeto, a, b, c, … y las variables o incógnitas por las últimas, x, y, z.
En esta época se enuncian problemas de ecuaciones que solo han sido resueltos actualmente, algunos recientemente; entre ellos el último teorema de Fermat, uno de los teoremas más famosos de la matemática, que no fue demostrado hasta 1995 por Andrew Wiles y Richard Taylor.
Siglos XVII-XVIII
En el siglo XVII, Isaac Newton y Gottfried Leibniz publicaron los primeros métodos de resolución de las ecuaciones diferenciales que aparecen en los problemas de la dinámica. Probablemente el primer libro sobre estas ecuaciones fue Sobre las construcciones de ecuaciones diferenciales de primer grado, de Gabriele Manfredi (1707). Durante el siglo XVIII, matemáticos ilustres como Leonhard Euler, Daniel Bernoulli, Joseph-Louis Lagrange y Pierre Simon Laplace publicaron resultados sobre ecuaciones diferenciales ordinarias y ecuaciones en derivadas parciales.
Época moderna
A pesar de todos los esfuerzos de las épocas anteriores, las ecuaciones algebraicas de quinto grado y superiores se resistieron a ser resueltas; solo se consiguió en casos particulares, pero no se encontraba una solución general. A principios del siglo XIX, Niels Henrik Abel demostró que hay ecuaciones no resolubles; en particular, mostró que no existe una fórmula general para resolver la ecuación de quinto grado; acto seguido Évariste Galois demostró, utilizando su teoría de grupos, que lo mismo puede afirmarse de toda ecuación de grado igual o superior a cinco.
Durante el siglo XIX, las ciencias físicas utilizaron, en su formulación, ecuaciones diferenciales en derivadas parciales y/o ecuaciones integrales, como es el caso de la electrodinámica de James Clerk Maxwell, la mecánica hamiltoniana o la mecánica de fluidos. El uso habitual de estas ecuaciones y de los métodos de solución llevó a la creación de una nueva especialidad, la física matemática.
Ya en el siglo XX, la física matemática siguió ampliando su campo de acción; Erwin Schrödinger, Wolfgang Ernst Pauli y Paul Dirac formularon ecuaciones diferenciales con funciones complejas para la mecánica cuántica. Albert Einstein utilizó ecuaciones tensoriales para su Relatividad General. Las ecuaciones diferenciales tienen también un amplio campo de aplicación en teoría económica.
Debido a que la mayoría de ecuaciones que se presentan en la práctica son muy difíciles o incluso imposibles de resolver analíticamente, es habitual utilizar métodos numéricos para encontrar raíces aproximadas. El desarrollo de la informática posibilita actualmente resolver en tiempos razonables ecuaciones de miles e incluso millones de variables usando algoritmos numéricos.
Definición general
Dada una función f : A → B y un b en B, es decir, un elemento del codominio de f.
|

Un ejemplo de ecuación es el siguiente, tomando

se tiene la ecuación con variable natural

El estudio de las ecuaciones depende de las características de los conjuntos y la aplicación; por ejemplo, en el caso de las ecuaciones diferenciales, los elementos del conjunto A son funciones y la aplicación f debe incluir alguna de las derivadas del argumento. En las ecuaciones matriciales, la incógnita es una matriz.
La definición que se ha dado incluye las igualdades de la forma g(x) = h(x). Si «+» denota la suma de funciones, entonces (B, +) es un grupo. Basta definir la aplicación f(x) = g(x) + ( – h(x) ), con –h el inverso de h con respecto a la suma, para transformar la igualdad en una ecuación f(x) = 0 con b = 0.
Conjunto de soluciones
Dada la ecuación f(x) = b, el conjunto de soluciones de la ecuación viene dado por S = f–1(b), donde f–1 es la imagen inversa de f. Si S es el conjunto vacío, la ecuación no es soluble; si tiene solo un elemento, la ecuación tendrá solución única; y si S posee más de un elemento, todos ellos serán soluciones de la ecuación.
En la teoría de ecuaciones diferenciales, no se trata solo de averiguar la expresión explícita de las soluciones, sino determinar si una ecuación determinada tiene solución y si esta es única. Uno de los métodos más corrientes para probar que existe una solución, consiste en aprovechar que el conjunto A tiene alguna topología. No es el único: en los sistemas de ecuaciones reales, se recurre a técnicas algebraicas para averiguar si estos sistemas tienen solución. No obstante, el álgebra carece de recursos para asegurar la existencia de soluciones en las ecuaciones algebraicas: para asegurar que toda ecuación algebraica con coeficientes complejos tiene una solución, hay que recurrir al análisis complejo[7] y, por lo tanto, a la topología.
Otro caso en los que se investiga la existencia y unicidad de soluciones es en los sistemas de ecuaciones lineales, en donde es posible caracterizar el conjunto solución a través del Teorema de Rouché-Frobenius.
Tipos de ecuaciones
Las ecuaciones suelen clasificarse según el tipo de operaciones necesarias para definir y según el conjunto de números sobre el que se busca la solución. Entre los tipos más comunes están y precisos son
- Ecuaciones algebraicas
- De primer grado o lineales
- De segundo grado o cuadráticas
- De tercer grado o cúbicas
- Diofánticas o difantinas
- Racionales, aquellas en las que uno o ambos miembros se expresan como un cociente de polinomios
- Ecuaciones trascendentes, cuando involucran funciones no polinómicas, como las funciones trigonométricas, exponenciales, logarítmicas, etc.
- Ecuaciones diferenciales
- Ecuaciones integrales
- Ecuaciones funcionales
Una ecuación diofántica es aquella cuya solución solo puede ser un número entero, es decir, en este caso A ⊆ ℤ.
Una ecuación funcional es aquella en la que algunas de las constantes y variables que intervienen no son realmente números sino funciones; y si en la ecuación aparece algún operador diferencial se llama ecuación diferencial.
Cuando A es un cuerpo y f un polinomio, se tiene una ecuación algebraica polinómica.
En un sistema de ecuaciones lineales, el conjunto A es un conjunto de vectores reales y la función f es un operador lineal.
Propiedades
Dos ecuaciones o sistemas de ecuaciones son equivalentes si tienen el mismo conjunto de soluciones. Las siguientes operaciones transforman una ecuación o un sistema de ecuaciones en uno equivalente, siempre que las operaciones tengan sentido para las expresiones a las que se aplican:
- Sumar o restar la misma cantidad a ambos lados de una ecuación. Esto demuestra que toda ecuación es equivalente a una ecuación en la que el lado derecho es cero.
- Multiplicar o dividir ambos lados de una ecuación por una cantidad distinta de cero.
- Aplicar una identidad para transformar un lado de la ecuación. Por ejemplo, expansión de un producto o factorización de una suma.
- Para un sistema: añadir a ambos lados de una ecuación el lado correspondiente de otra ecuación, multiplicado por la misma cantidad.
Si se aplica alguna función a ambos lados de una ecuación, la ecuación resultante tiene las soluciones de la ecuación inicial entre sus soluciones, pero puede tener más soluciones llamadas solución extraña. Por ejemplo, la ecuación tiene la solución Si se elevan ambos lados al exponente 2 (lo que significa aplicar la función a ambos lados de la ecuación), la ecuación cambia a , que no sólo tiene la solución anterior, sino que introduce la solución extraña, Además, si la función no está definida en algunos valores (como 1/x, que no está definida para x = 0), las soluciones existentes en esos valores pueden perderse. Por tanto, hay que tener cuidado al aplicar una transformación de este tipo a una ecuación.





Las transformaciones anteriores son la base de la mayoría de los métodos elementales de resolución de ecuaciones, así como de algunos menos elementales, como la eliminación gaussiana.
El axioma fundamental de las ecuaciones es:
|
Se consideran operaciones elementales aquellas que preservan una igualdad matemática. Ejemplos sencillos de operaciones elementales son la suma, la multiplicación y sus inversas respectivas, resta y división. Esto implica:
- Si a los dos miembros de una ecuación se les suma una misma cantidad positiva o negativa, la igualdad subsiste.

- Si los dos miembros de una ecuación se multiplican por una misma cantidad, positiva o negativa, la igualdad subsiste.

- Si los dos miembros de una ecuación se dividen por una misma cantidad no nula, positiva o negativa, la igualdad subsiste.

Otras dos operaciones respetan la igualdad pero pueden alterar el conjunto de soluciones:
- Simplificar factores comunes presentes en ambos lados de una ecuación que contienen variables. Esta operación debe aplicarse con cuidado, porque el conjunto de soluciones puede verse reducido. Por ejemplo, la ecuación y · x = x tiene dos soluciones: y = 1 y x = 0. Si se dividen ambos lados entre x para simplificarla se obtiene la ecuación y = 1, pero la segunda solución se ha perdido.
- Si se aplica una función no inyectiva a ambos lados de una ecuación, la ecuación resultante puede tener un conjunto de soluciones más grande que el original.
En general, si se aplican funciones inyectivas a ambos miembros, la igualdad subsiste.
Además, una igualdad es una relación de equivalencia,[8] con lo cual se cumplen las siguientes propiedades.
- Propiedad reflexiva: a = a.
Ejemplos: 14 = 14, x + 8 = x + 8
- Propiedad simétrica: Si a = b, entonces b = a.
Ejemplos: Si x = 5, entonces 5 = x. Si y = 2 + x, entonces 2 + x = y.
- Propiedad transitiva: Si a = b, y b = c, entonces a = c.
Ejemplos: Si x = a, y a = 8b, entonces x = 8b. Si xy = 8z, y 8z = 32, entonces xy = 32.
Resolución de ecuaciones
Resolver una ecuación es encontrar su dominio solución, que es el conjunto de valores de las incógnitas para los cuales la igualdad se cumple.
Por lo general, los problemas matemáticos pueden expresarse en forma de una o más ecuaciones;[cita requerida] sin embargo no todas las ecuaciones tienen solución, ya que es posible que no exista ningún valor de la incógnita que haga cierta una igualdad dada. En ese caso, el conjunto de soluciones de la ecuación será vacío y se dice que la ecuación no es resoluble. De igual modo, puede tener un único valor, o varios, o incluso infinitos valores, siendo cada uno de ellos una solución particular de la ecuación.
Si cualquier valor de la incógnita hace cumplir la igualdad (esto es, no existe ningún valor para el cual no se cumpla) la ecuación es en realidad una identidad.[nota 2]
Ecuaciones algebraicas
Una ecuación algebraica es aquella que contiene solo expresiones algebraicas, como polinomios, expresiones racionales, radicales y otras. Por ejemplo:

Definición
Se llama ecuación algebraica con una incógnita la ecuación que se reduce a lo que sigue:

donde n es un número entero positivo; α0, α1, α2, ..., αn – 1, αn se denominan coeficientes o parámetros de la ecuación y se toman dados; x se nombra incógnita y se busca su valor. El número n positivo se llama grado de la ecuación[9] Para definir un número algebraico, se consideran números racionales como coeficientes.
Forma canónica
Realizando una misma serie de transformaciones en ambos miembros de una ecuación, puede conseguirse que uno de ellos se reduzca a cero. Si además se ordenan los términos según los exponentes a los que se encuentran elevadas las incógnitas, de mayor a menor, se obtiene una expresión denominada forma canónica de la ecuación. Frecuentemente suelen estudiarse las ecuaciones polinómicas a partir de su forma canónica, es decir aquella cuyo primer miembro es un polinomio y cuyo segundo miembro es cero.
En el ejemplo dado, sumando 2xy y restando 5 en ambos miembros, y luego ordenando, obtenemos:

Grado
Se denomina grado de una ecuación polinomial al mayor exponente al que se encuentran elevadas las incógnitas. Por ejemplo

Es una ecuación de tercer grado porque la variable x se encuentra elevada al cubo en el mayor de los casos.
Las ecuaciones polinómicas de grado n de una sola variable sobre los números reales o complejos, pueden resolverse por el método de los radicales cuando n < 5 (ya que en esos casos el grupo de Galois asociado a las raíces de la ecuación es soluble). La solución de la ecuación de segundo grado es conocida desde la antigüedad; las ecuaciones de tercer y cuarto grado se conocen desde los siglos XV y XVI, y usan el método de radicales. La solución de la ecuación de quinto grado no puede obtenerse mediante el método de radicales, aunque puede escribirse en términos de la función theta de Jacobi.
Ecuación de primer grado
Se dice que una ecuación algebraica es de primer grado cuando la incógnita (aquí representada por la letra x) está elevada a la potencia 1 (grado = 1), es decir que su exponente es 1.
Las ecuaciones de primer grado tienen la forma canónica:

donde a y b están en un conjunto numérico (ℚ, ℝ) con a diferente de cero.
Su solución es sencilla: . Exige la resolución, la existencia de inversos multiplicativos.

Ecuación de segundo grado
Las ecuaciones polinómicas de segundo grado tienen la forma canónica:

Donde a es el coeficiente del término cuadrático (aquel en que la incógnita está elevada a la potencia 2), b es el coeficiente del término lineal (el que tiene la incógnita sin exponentes, o sea que está elevada a la potencia 1) y c es el término independiente (el que no depende de la variable, o sea que está compuesto solo por constantes o números).
Cuando esta ecuación se plantea sobre ℂ, siempre se tienen dos soluciones, calculándose con el método de Euler:

Obviamente la condición para que la ecuación tenga solución sobre los números reales ℝ se requiere que b2 ≥ 4ac y para que tenga soluciones sobre los números racionales ℚ se requiere b2 – 4ac sea el cuadrado de algún número entero.
Ecuaciones polinómicas
En general, una ecuación algebraica o ecuación polinómica es una ecuación de la forma:
- , o


donde P y Q son polinomios con coeficientes en algún campo (por ejemplo, números racionales, números reales, números complejos). Una ecuación algebraica es univariante si implica una sola variable. Por otro lado, una ecuación polinómica puede involucrar varias variables, en cuyo caso se llama multivariante (variables múltiples, x, y, z, etc.). El término ecuación polinómica suele preferirse a ecuación algebraica.

es una ecuación algebraica univariante (polinómica) con coeficientes enteros y

es una ecuación polinómica multivariante sobre los números racionales.
Algunas (pero no todas) ecuaciones polinómicas con coeficientes racionales tienen una solución que es una expresión algebraica, con un número finito de operaciones que implican sólo esos coeficientes (es decir, puede ser resuelta algebraicamente). Esto puede hacerse para todas esas ecuaciones de grado uno, dos, tres o cuatro; pero para las ecuaciones de grado cinco o más, puede resolverse para algunas ecuaciones pero, como demuestra el teorema de Abel-Ruffini, no para todas.
Se ha dedicado una gran cantidad de investigación a calcular de forma eficiente aproximaciones precisas de las soluciones de real o complejo de una ecuación algebraica univariante (véase Resolución numérica de ecuaciones no lineales) y de las soluciones comunes de varias ecuaciones polinómicas multivariantes (véase Sistema de ecuaciones algebraicas).
Ecuaciones diferenciales e integrales
Una ecuación diferencial es una ecuación matemática que relaciona alguna función con sus derivadas. En las aplicaciones, las funciones suelen representar cantidades físicas, las derivadas representan sus tasas de cambio y la ecuación define una relación entre ambas. Debido a que tales relaciones son extremadamente comunes, las ecuaciones diferenciales juegan un papel prominente en muchas disciplinas, incluyendo la física, la ingeniería, la economía y la biología.
En matemáticas puras, las ecuaciones diferenciales se estudian desde varios puntos de vista, sobre todo en relación con sus soluciones, el conjunto de funciones que satisfacen la ecuación. Sólo las ecuaciones diferenciales más sencillas pueden resolverse mediante fórmulas explícitas; sin embargo, algunas propiedades de las soluciones de una ecuación diferencial dada pueden determinarse sin encontrar su forma exacta.
Si no se dispone de una fórmula autocontenida para la solución, ésta puede aproximarse numéricamente mediante ordenadores. La teoría de los sistemas dinámicos hace hincapié en el análisis cualitativo de los sistemas descritos por ecuaciones diferenciales, mientras que se han desarrollado muchos métodos numéricos para determinar las soluciones con un determinado grado de precisión.
Tanto en matemáticas como en física y otras ciencias aplicadas, frecuentemente se usan ecuaciones no algebraicas, donde las incógnitas no son simplemente valores numéricos sino funciones. Por ejemplo, la trayectoria de una partícula ligera en el campo gravitatorio de una estrella puede hallarse de manera aproximada gracias a buscar la solución de una ecuación diferencial del tipo:


Donde es el vector de posición de la partícula tomando el origen de coordenadas en la estrella, M es la masa del sol y G la constante de la gravitación universal.
En las ecuaciones, el conjunto de soluciones forman un cierto espacio de funciones, tales que todas ellas satisfacen la ecuación. Si el conjunto de soluciones se puede especificar por un número finito de condiciones iniciales, entonces ese espacio es localmente una variedad diferenciable de dimensión finita, cosa que sucede frecuentemente con las ecuaciones diferenciales ordinarias. En las ecuaciones en derivadas parciales frecuentemente el conjunto de soluciones posibles con diferentes condiciones de contorno pueden formar un espacio de dimensión no finita.
Ecuaciones diferenciales ordinarias
Una ecuación diferencial ordinaria o EDO' es una ecuación que contiene una función de una variable independiente y sus derivadas. El término ordinaria se utiliza en contraste con el término ecuación diferencial parcial, que puede ser con respecto a más de una variable independiente.
Las ecuaciones diferenciales lineales, que tienen soluciones que se pueden sumar y multiplicar por coeficientes, están bien definidas y se entienden, y se obtienen soluciones exactas de forma cerrada. Por el contrario, las EDO que carecen de soluciones aditivas son no lineales, y su resolución es mucho más complicada, ya que rara vez se pueden representar mediante funciones elementales de forma cerrada: En cambio, las soluciones exactas y analíticas de las EDOs están en forma de serie o integral. Los métodos gráficos y numéricos, aplicados a mano o por ordenador, pueden aproximar las soluciones de las EDOs y tal vez proporcionar información útil, a menudo suficiente en ausencia de soluciones exactas y analíticas.
Ecuaciones en derivadas parciales
Una Ecuación en derivadas parciales (EDP) es una ecuación diferencial que contiene funciones desconocidas multivariables y sus derivadas parciales. (Esto contrasta con las ecuaciones diferenciales ordinarias, que tratan con funciones de una sola variable y sus derivadas). Las EDP se utilizan para formular problemas que implican funciones de varias variables, y se resuelven a mano o se utilizan para crear un modelo informático pertinente.
Las EDP pueden utilizarse para describir una amplia variedad de fenómenos como el sonido, el calor, la electrostática, la electrodinámica, el flujo de fluidos, la elasticidad o la mecánica cuántica. Estos fenómenos físicos aparentemente distintos pueden formalizarse de forma similar en términos de EDP. Así como las ecuaciones diferenciales ordinarias suelen modelar sistemas dinámicos unidimensionales, las ecuaciones diferenciales parciales suelen modelar sistemas multidimensionales. Las EDP encuentran su generalización en las ecuaciones diferenciales parciales estocásticas.
Las ecuaciones en la geometría
Geometría analítica
En la geometría euclidiana, es posible asociar un conjunto de coordenadas a cada punto del espacio, por ejemplo mediante una cuadrícula ortogonal. Este método permite caracterizar las figuras geométricas mediante ecuaciones. Un plano en un espacio tridimensional puede expresarse como el conjunto de soluciones de una ecuación de la forma , donde y son números reales y son las incógnitas que corresponden a las coordenadas de un punto del sistema dado por la retícula ortogonal. Los valores son las coordenadas de un vector perpendicular al plano definido por la ecuación. Una recta se expresa como la intersección de dos planos, es decir, como el conjunto de soluciones de una única ecuación lineal con valores en o como el conjunto de soluciones de dos ecuaciones lineales con valores en






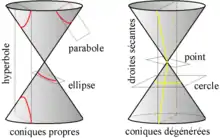
Una sección cónica es la intersección de un cono con ecuación y un plano. En otras palabras, en el espacio todas las cónicas se definen como el conjunto de soluciones de una ecuación de un plano y de la ecuación de un cono recién dado. Este formalismo permite determinar las posiciones y las propiedades de los focos de una cónica.

El uso de las ecuaciones permite recurrir a un amplio campo de las matemáticas para resolver cuestiones geométricas. El sistema de coordenadas cartesianas transforma un problema geométrico en un problema de análisis, una vez que las figuras se transforman en ecuaciones; de ahí el nombre de geometría analítica. Este punto de vista, esbozado por Descartes, enriquece y modifica el tipo de geometría concebido por los antiguos matemáticos griegos.
Actualmente, la geometría analítica designa una rama activa de las matemáticas. Aunque sigue utilizando las ecuaciones para caracterizar las figuras, también emplea otras técnicas sofisticadas como el análisis funcional y el álgebra lineal.
Ecuaciones cartesianas
Un sistema de coordenadas cartesianas es un sistema de coordenadas que especifica cada punto de forma única en un plano por un par de numérico o coordenadas, que son las distancias desde el punto a dos líneas fijas perpendiculares dirigidas, que se marcan usando la misma unidad de longitud.
Se puede utilizar el mismo principio para especificar la posición de cualquier punto en el espacio de tres dimensiones mediante el uso de tres coordenadas cartesianas, que son las distancias con signo a tres planos mutuamente perpendiculares (o, equivalentemente, mediante su proyección perpendicular sobre tres líneas mutuamente perpendiculares).
La invención de las coordenadas cartesianas en el siglo XVII por René Descartes (nombre latinizado: Cartesius) revolucionó las matemáticas al proporcionar el primer vínculo sistemático entre la geometría euclidiana y el álgebra. Utilizando el sistema de coordenadas cartesianas, las formas geométricas (como las curvas) pueden describirse mediante ecuaciones cartesianas: ecuaciones algebraicas que implican las coordenadas de los puntos situados en la forma. Por ejemplo, un círculo de radio 2 en un plano, centrado en un punto particular llamado el origen, puede ser descrito como el conjunto de todos los puntos cuyas coordenadas x e y satisfacen la ecuación x2 + y2 = 4.
Ecuaciones paramétricas
Una ecuación paramétrica para una curva expresa las coordenadas de los puntos de la curva como funciones de una variable, llamada parámetro.[11][12]

son ecuaciones paramétricas para el círculo unitario, donde t es el parámetro. En conjunto, estas ecuaciones se llaman una representación paramétrica de la curva.
La noción de ecuación paramétrica se ha generalizado a superficies, variedades y variedades algebraicas de mayor dimensión, siendo el número de parámetros igual a la dimensión de la variedad, y el número de ecuaciones es igual a la dimensión del espacio en el que se considera la variedad (para las curvas la dimensión es uno y se utiliza un parámetro, para las superficies la dimensión es dos y dos parámetros, etc.).
Ejemplos de ecuaciones
Véase también
Notas
- En ocasiones, alguno de los datos de la ecuación puede no tener valor único, y aun así seguir siendo conocido, ya sea por formar parte de un conjunto finito de valores (por ejemplo una tabla) o por tratarse de un dato de entrada a elección. Dicho valor, que aunque siendo variable no es una incógnita sino un dato, podrá eventualmente aparecer formando parte de la solución. Así entonces, del mismo modo que x = 3π podría ser una solución posible para una ecuación (donde π es un número) también podría serlo x = 3h donde h es el dato variable.
- Las identidades no son consideradas ecuaciones, ya que en ellas no cabe el concepto de solución.
- Ejemplos tomados de: Stewart, I. (2015). 17 ecuaciones que cambiaron el mundo. 432 pp. México: Ediciones Culturales Paidós. ISBN 9786078406708
Referencias
- Recorde, Robert (1557). The Whetstone of Witte.
- «Compendium of Mathematical Symbols». Math Vault (en inglés estadounidense). 1 de marzo de 2020. Consultado el 1 de septiembre de 2020.
- «Equation - Math Open Reference». www.mathopenref.com. Consultado el 1 de septiembre de 2020.
- «Equations and Formulas». www.mathsisfun.com. Consultado el 1 de septiembre de 2020.
- Valek, G. (2016, enero). Reseña de 17 ecuaciones que cambiaron el mundo, de Ian Stewart, editado por Ediciones Culturales Paidós, México, 2015. En la sección "¿Qué leer?", ¿Cómo ves?, Revista de Divulgación de la Ciencia de la Universidad Nacional Autónoma de México. Año 18, núm. 206, p. 38. México: Dirección General de Divulgación de la Ciencia. ISSN 1870-3186
- Un poquito de la historia del álgebra, Red Escolar, México, 2008.
- Derrick, William . (1984). Variable compleja con aplicaciones (2.ª edición). Colombia: Iberoamérica. p. 88. ISBN 968-7270-35-7. Consultado el 23 de julio de 2015.
- Selzer, Samuel (15 de septiembre de 1970). Álgebra y geometría analítica (2.ª edición). Buenos Aires: Nigar. p. 2.
- Manual de matemática (1985). Tsipkin, Editorial Mir, Moscú; traducción de Shapovalova; p. 150.
- Como tal ecuación puede reescribirse P - Q = 0, muchos autores no consideran este caso explícitamente.
- Thomas, George B., and Finney, Ross L., Calculus and Analytic Geometry, Addison Wesley Publishing Co., fifth edition, 1979, p. 91.
- Weisstein, Eric W. "Parametric Equations." From MathWorld--A Wolfram Web Resource. http://mathworld.wolfram.com/ParametricEquations.html
Enlaces externos
 Wikiquote alberga frases célebres de o sobre Ecuación.
Wikiquote alberga frases célebres de o sobre Ecuación.- La ecuación de primer grado, en descartes.cnice.mec.es